3D-TOF相机在空间近距离目标探测中的应用研究
2019-03-04宋玉志卢纯青
宋玉志,卢纯青,王 立
北京控制工程研究所光电技术事业部,北京 100190.
0 引 言
随着我国航天技术的大发展,月球探测以及深空探测工程面临更为复杂的宇宙环境,急需探测手段的不断进步,探测设备的不断创新来满足对更为复杂的宇宙环境探测的需求.距离测试和光学成像测量是航天应用中的常见的测试手段,但在传统的测试方法中,这两种测试手段往往是分开的,因此,航天器通常需要携带两种以上的设备来进行距离测试和拍摄图像,而将测距和成像结合起来的3D-TOF相机将会是一种全新的探测手段来代替传统的设备,为宇航探测带来更高的探测效率和更高的精度.
TOF是Time of flight的简写,直译为飞行时间的意思,而3D-TOF相机即为通过时间飞行法测距实现三维成像的相机.所谓飞行时间法测距,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离[1].TOF技术已经在航天技术应用中有所展现,如全扫描式激光雷达,其工作原理是在点测量与线测量的基础上,通过对空间全扫描来完成整个空间物体的三维扫描过程.这种扫描式的三维成像技术的优点是探测距离远、精度高,但是缺点是价格昂贵、体积大、需要笨重的扫描机构.而3D-TOF相机经过设计拥有独特的功能,传感器的每一个像素都是一个完整的解调接收器,因此不再需要激光扫描仪逐个点扫描后组成三维图像,而是各个像素并行工作直接完成三维信息的实时测量[2].
3D-TOF相机在航天领域将会有广阔的应用前景.如在月球车、火星车上安装的传统的2D相机用于导航和避障,而这些相机只能得到二维灰度信息,不能得到距离信息,只能通过后期的算法设计、精度标定等手段进行障碍物的判读.而3D-TOF相机将能够同时得到灰度信息和距离信息[3-4],可以降低后期算法处理的复杂度,提升处理速度;同时可以减少月球车、火星车设备的数量,并降低总重量.此外,在小行星跟踪降落的过程中,需要对小行星的降落点进行快速的三维地形扫描以获得是否能够安全着陆的信号,3D-TOF相机应用在这一场景将会极大地提高飞行器成功降落的概率.
目前3D-TOF相机的发展刚刚起步,国内在宇航空间中的应用尚未展开,因此需要对其机理和应用做初步详细的探究,尤其是3D-TOF相机在空间目标探测的应用范围以及测量精度等是急需研究的问题,本文将重点对这些问题进行分析.
1 3D-TOF相机原理
TOF的基本原理如图1所示,光发射与光返回之间的时间差精确测量是飞行时间法的核心思想.光源发射光脉冲开始到光脉冲被探测器接收的这段时间,与光的飞行速度的乘积就是所需要的测量距离结果的两倍.

图1 3D-TOF相机工作原理Fig.1 The operational principle of 3D-TOF camera
TOF技术中的光接收器一般采用与传统技术中CMOS 或 CCD 图像传感器相类似的原理,都是利用光生载流子累积效应来获取数据,而TOF技术需要一个相位解调过程.广泛的使用方法是间接TOF方法,即,先测量发射信号与返回信号的相位差,再利用相关性间接得到相应的飞行时间,从而计算出测量距离.
TOF测量的基本公式如式(1)所示:
d=1/2(nλ+Δφ/(2π)λ)(1)
式中,λ为光源发射的光脉冲信号的波长,一般是在850 nm范围左右,n是光脉冲的数目,Δφ就是要重点计算的与最终结果精度密切相关的延迟相位.c为已知的光速,调制频率越高,量程就越小,考虑到光源的功率以及光散射等问题,一般TOF技术的最大测量距离都要比光在半个周期内的飞行距离要小,所以,这也是3D-TOF技术应用的难题.
TOF的测量信号示意图如图2所示,20 MHz的正余弦调制信号是系统的光源发射出经过调制后的光波信号,设定调制波形的初始相位φ0=0°,光脉冲返回后的信号相位为φ1=240°,那么总的相位延迟是Δφ=240°,可以计算出距离d=5 m.
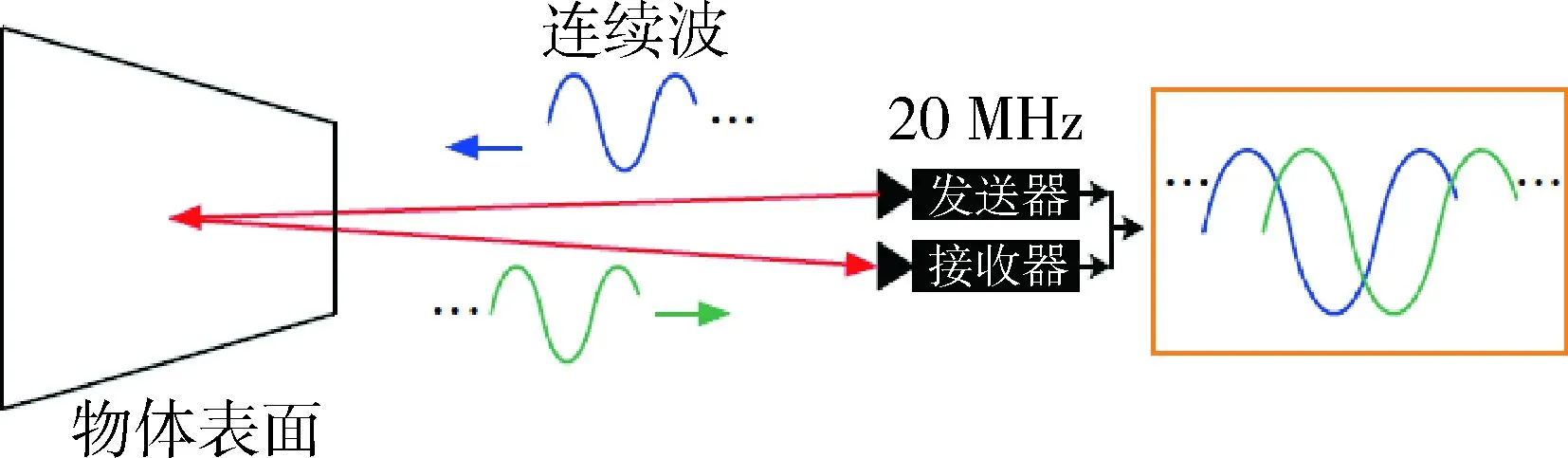
图2 TOF测量示意图Fig.2 The sketch map of measurement
连续的光源信号为:
s(t)=cos(ωt)
从物体反射回来的信号:
g(t)=Acos(ωt+Δφ)
TOF通过解调发射信号与接收信号之间的相位差,从而获得距离信息[5],计算过程如下:
d=tc/2=cφ/(4πfmod)(2)
其中fmod表示发射光的频率.
从物体反射回来的信号的幅度和相位都会受到调制,其中相位的变化受距离信息的控制,如图3所示,调制幅值为A,调制相位为φ
s(t)=1+Acos(ϖt-φ)
同步解调信号或相关信号为:
g(t)=cos(ϖt)
则根据相关函数定义有:
c(τ) =s(t)⊗g(t)

[cos(ϖt+ωt)]dt
相位延迟解调方法为:利用4个采样点的值,如图4所示,计算出信号的幅度与相位.τ=ωt,当τ分别为0°、90°、180°、270°时,K代表背景光幅度,4个采样点为:
C(τ0)=c(τ0)+K=a/2·cos(φ)+K,
C(τ1)=c(τ1)+K=-a/2·sin(φ)+K,
C(τ2)=c(τ2)+K=-a/2·cos(φ)+K,
C(τ3)=c(τ3)+K=a/2·sin(φ)+K
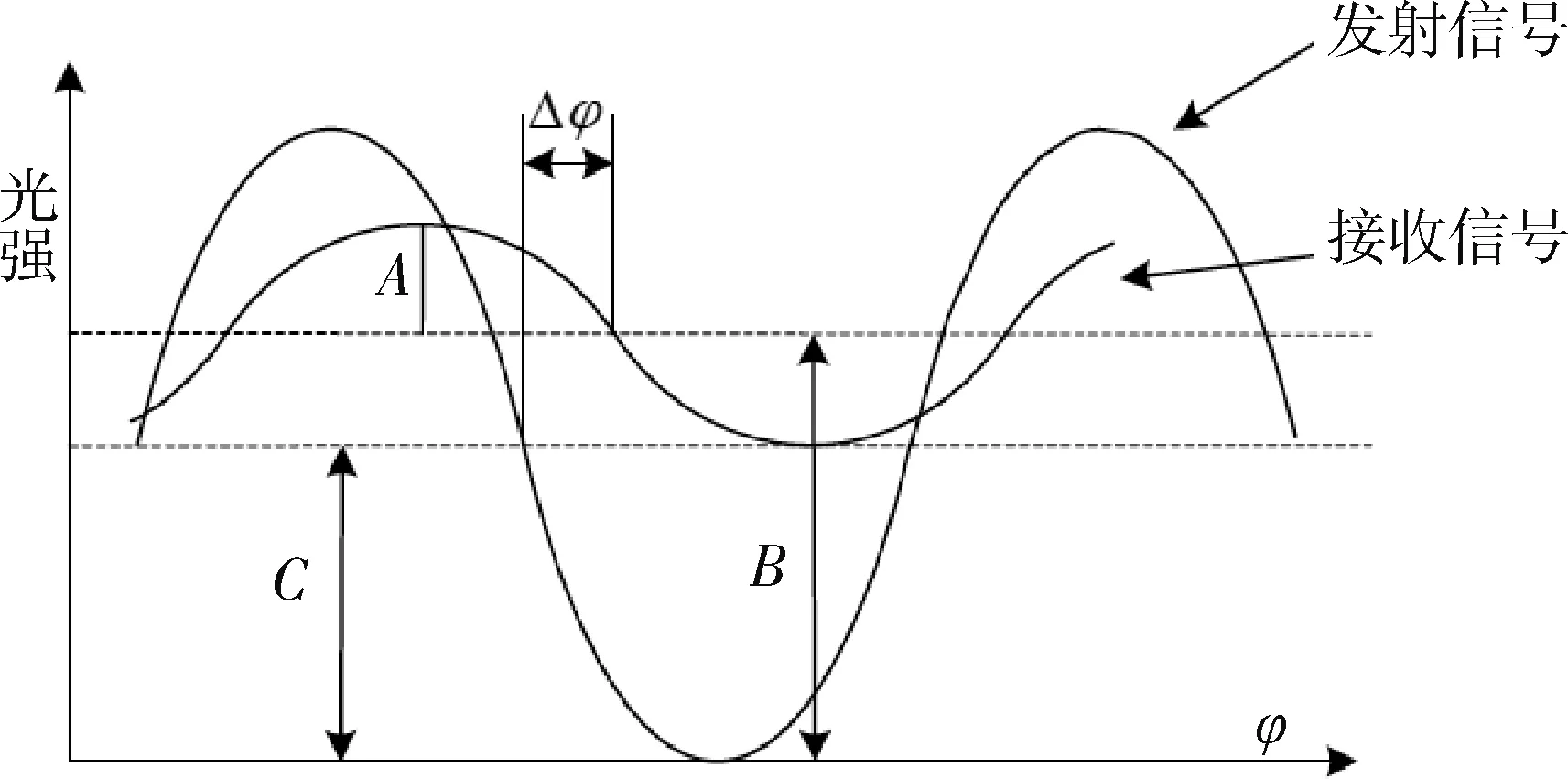
图3 发射信号与接收信号相位变化Fig.3 The variation of emitting signal and received signal

图4 调制信号图Fig.4 The diagram of modulation signal
根据以上几式可以计算得出相位、幅度、失调分别为
在3D-TOF相机的各个参数指标中,比较重要的有调制频率:即发射光信号的调制频率;测量距离:调制光在半个周期内的飞行距离;反射光亮度:上述公式中的A,反映回光强度;环境光分量:上式中的B,反映调制光以外的环境光强度.这些参数影响3D-TOF相机的测量距离以及测量精度等指标,在系统设计中需要重点关注.
2 目标成像测试
本文通过TI公司的OPT8241-CDK-EVM评估模块[6]对3D-TOF相机的性能进行评测,OPT8241-CDK-EVM是德州仪器公司的第二代官方3D-TOF评估模块.评估模块包含高性能的QVGA分辨率的3D-TOF图像传感器OPT8241以及TOF控制芯片OPT9221.
3D-TOF相机的工作距离较近,比较适合的应用场景是在小行星探测等领域,探测器在选择着陆区域的时候,利用3D-TOF相机对着陆区域进行实时的成像观测,得到地貌的三维图像,通过自动识别算法选择一个高度起伏较低的水平区域进行着陆.
为了评测3D-TOF相机对地貌起伏的的探测效果,利用3D-TOF相机对模拟沙盘进行了成像测试.沙盘的大小约5 m×3 m,沙盘上放置了不同大小不同材质的石块,模拟地貌表面岩石砂砾.
将3D-TOF相机置于沙盘上方一定的距离,对沙盘进行探测,同时得到沙盘的灰度图和三维点云图,如图5和6所示.

图5 沙盘灰度图Fig.5 The grey-scale map of sand table
从灰度图中可以看出,沙坑和石块都较清晰,能较好的恢复沙盘表面的原貌.同时,利用相机获取的深度信息,通过Matlab软件显示原始数据得到了沙盘地貌的三维点云图,图6中,每一个点代表TOF传感器的每一个像素得到的三维坐标以及强度信息,从三维点云图中可以看出,沙盘表面,沙坑、石头等目标物体的三维坐标信息都得到了很好的还原.三维点云中各个点的Z坐标,即目标点距相机的距离;沙盘上的沙坑在三维图中可以看出,沙坑中心有明显的下陷,从Z坐标可以看出,沙坑中心相较低;对于灰度图中左下角的大石块,可以看到在大石块上放置的一块小石块在三维点云图中也得以区分.

图6 沙盘三维点云图像Fig.6 The 3D clouds map of sand table
在空间应用中,3D-TOF相机的探测目标包括小卫星等,卫星表面的材质一般为高反射材料以及太阳电池,为了探究3D-TOF相机对小卫星探测效果,利用卫星模型对3D-TOF相机的成像效果进行了分析.
实验中所使用的模型为比例为1∶6的卫星模型,模型的主体结构包覆了同真实卫星相同的高反射率的聚酰亚胺材料,其主要作用是在空间中反射太阳能量,防止卫星本体温度过高,而卫星帆板则为同太阳能电池板相同的低反射率的材料,其主要功能是提高对太阳光能量的吸收.
实验中,首先使用3D-TOF相机正对卫星模型进行成像,得到卫星模型的灰度图和三维图如图7~8 所示.

图7 卫星模型灰度图Fig.7 The grey-scale map of satellite model
从图7和8可以看出由于卫星模型本体高反射材料的反射率较高,在灰度图中出现了部分区域饱和的现象,但仍能较好的还原卫星模型的细节.三维点云图进行了过滤处理,过滤掉了背景墙上的非目标点, 并得到较好的卫星本体和部分太阳翼三维点云.
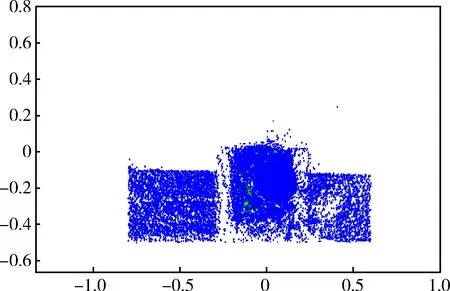
图8 卫星模型三维点云图Fig.8 The 3D clouds map of satellite model
除了正对卫星模型外,将卫星模型围绕自身旋转轴进行了一定角度的旋转,从而进一步评估3D-TOF相机对卫星模型的成像质量.
从图9和10可以看出,旋转一定角度后,由于3D-TOF相机的主动发射的红外光打到卫星本体的高反射材料后发生镜面反射,反射光不能进入相机的镜头,因此灰度图显示卫星本体的高反射材料部分的灰度非常低,太阳翼部分包覆白纸的部分发生漫反射因此灰度较高,由于太阳翼帆板裸露部分反射率低,图像灰度也非常低.从三维点云图中也可以看出,卫星本体高反射率材料部分没有点返回,太阳翼白纸包覆部分点云完整,而太阳翼帆板裸露部分由于主动发射红外光被吸收因此返回的有效点也非常少.

图9 旋转角度卫星模型灰度图Fig.9 The grey-scale map of satellite modelin rotation angle
从卫星模型的成像灰度图和三维点云图中可以看出,对于空间卫星的常用材料3D-TOF相机可以在一定条件正常探测成像,而在角度较大导致3D-TOF相机主动发出的光照射到目标上不能返回相机时,相机将会丢失这一部分目标的信息.

图10 旋转角度卫星模型三维点云图Fig.10 The 3D clouds map of satellite model inrotation angle
3 精度和误差分析
3D-TOF相机的测量精度受反射光亮度A和环境光分量B 的影响近似于如下公式:
从公式中可以看出更高亮度A, 更快调制频率f会提高测量精度,但是更高的环境光分量B会降低测量精度.
3D-TOF相机是通过主动发射红外光成像,传感器接收到的光信号包含了主动发射光的回光信号,太阳光以及其他环境光等集合而成,同时在相机工作过程中还受目标各项属性的因素影响,其误差来源比较复杂.一般来说3D-TOF相机的测量误差主要分为系统误差和非系统误差两类.
系统误差可以分为几种:
(1) 相关函数误差,也称为摆动误差.当相机主动发射的红外光在目标的表面发生了反复的反射和散射时,这些信号与正常信号融合,造成了误差.
(2) 积分时间误差.过长的积分时间,可能会导致回光信号受到较多干扰,有研究表明[7],对于3D-TOF相机,积分时间越短,目标物体成像噪点越少、深度图像越清晰.
(3) 温度和波形等其他因素造成的误差.由于3D-TOF图像传感器是一个高精度的测量敏感器,其灵敏度会受到器件温度的变化影响,带来一定的误差.系统误差通常伴随硬件本身的性质而来,比较固定,误差的值是有规律的,可以通过标定来得出误差的规律通过补偿算法来进行规避.
对于非系统误差,引起这一类误差的因素较多,如测试距离、被测目标的表面反射率、被测物体材质、相机持续工作时间、杂光等因素.这一类的误差具有随机性,对测试结果造成的误差影响很难通过规律来预判,没有一个有效的校正方法,需要根据具体的测试环境做相应的调整,且处理难度较大.
通过对3D-TOF相机测试误差分析,并通过进一步的测试试验,分析相机系统对静态目标在不同条件下的测试精度和误差等结果,对相机的应用做更好的评估.
实验采取了两种方式来测试,如图11所示;第一种方式为利用3D-TOF相机对一墙面(墙面可认为是漫反射的光滑的平面)在不同的距离进行拍照,将返回的距离值取平均值,即3D-TOF相机距离的测试值,与实际值进行对比得出不同距离的相机测量误差;第二种方法是将3D-TOF相机放置在距离目标墙一定距离处,在相机与墙面之间放置另一个移动目标,通过改变移动目标的位置进行测试,并利用3D-TOF相机测试每次移动目标与目标墙面的距离差,比较移动目标与目标墙面的实际距离,从而得到测量误差.

图11 两种测试方式示意图Fig.11 The sketch maps of two measurements
在第一种测试方法中,分别将相机放置在目标墙面前方不同的距离,图12为相机距离目标墙面约1 m时得到的目标墙面的三维点云图,此时目标墙面占据相机的全部视场,图中可以看出,相机的视场为长方形,x向比y向略大,由于相机的镜头有畸变因此视场的四角点云发生拉伸.图13为从整体视场中选择的部分区域的点云图,利用这块区域可以对其测试距离、精度、误差等数据进行分析.表1为不同的测试距离的误差、精度等分析.
从表1中可以看出,在0~3 m的范围内,相机对目标墙体的距离测试具有较高的精度,误差比例都在1%以内,在1 m处的误差只有1.4 mm,说明相机对于近距离探测有很高的准确性,而表中在不同距离的距离分辨精度可以看出,相机在1 m处的距离测试精度为4 mm,说明相机距离分辨率较好;在0~3 m的距离内,随着距离增加,相机的测量精度降低,主要原因是主动发射的红外光在照射到目标反射回来的过程中,随距离增加受到的干扰越多,测量误差则相应的增大.

图12 距离约1 m时目标墙面点云图Fig.12 The 3D clouds map of wall at distanceof about 1 m
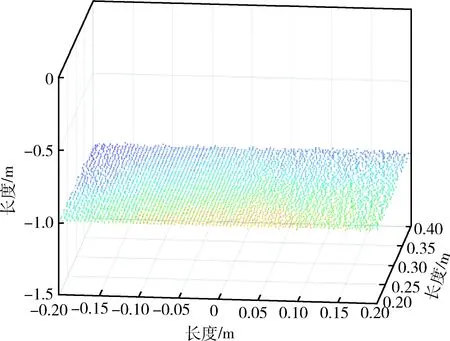
图13 距离1 m点云图部分点阵Fig.13 The 3D clouds map of part of wallat distance of 1 m
表1 第一种测试方法测试数据Tab.1 The test data ofthe first measurement

实际值/m测试值/m误差/m误差/实际距离百分比/%精度/m0.50.499 29-0.000 71-0.1420.003 01710.998 59-0.001 41-0.1410.004 0271.51.502 70.002 70.180.006 0521.99-0.01-0.50.006 3652.52.507 70.007 70.3080.017 28832.986-0.014-0.466 670.015 8
在第二种测量方法中,对于不同的测试距离采用了3D-TOF相机两种不同的距离模式,在相机与目标墙约2 m距离时,选用近距离模式进行测试,在相机与目标墙约5 m的测试距离,则采用远距离模式并对其误差进行分析.
图14为相机拍摄的移动目标和墙面的点云图,移动目标为一块长方形的平面白板,通过选取目标墙面的部分区域的点阵得到距离的平均值,同时选取移动目标上的部分区域点阵得到移动目标的测试距离平均值,通过两个距离的差值即可得到测试距离与实际距离进行对比得到测量误差.

图14 目标墙面和移动目标三维点云图Fig.14 The 3D clouds map of the moving targetand the target wall
表2为相机通过近距离模式测得的不同差值距离的数据,从表中可以看出目标墙的距离约为2.11 m,测试的距离的标准差为0.49 mm,说明相机在不同的测试中稳定性和一致性较好,目标墙与移动目标距离测量误差基本都在1%以内,具有很好的准确性,在测试距离差值为0.3 m时,测量误差仅为0.9 mm,在测试距离差为1 m处出现了一个较大值,这是由于系统的随机误差导致的.
表3为相机通过远距离模式测得的不同差值距离的数据,目标墙的距离约为5.2 m,移动目标的距离不断改变得到不同的距离差值,通过不同次数对目标墙距离的测试,得到标准差为1.1 mm,说明远距离模式下,测试的稳定性也较好.从测试距离差值数据可以看出,远距离模式下相机对于距离测试误差较大,而且在差值为2 m时误差为最小,这是由于当移动目标和目标墙都较远时,相机对两者测试的误差都较大,其差值可能会更大;而当移动目标距离较近时,远距离模式下,相机对近距离的目标测试误差也会变大,这就导致了测试误差在移动目标在中间距离时较小.不同次数测得的目标墙距离精度也比较稳定,说明相机的测量精度稳定性较好,移动目标的距离测试精度则随着距离增加有下降的趋势.

表2 第二种测试方法近距离模式测试数据Tab.2 The test data of the second measurement in close range mode

表3 第二种测试方式远距离模式测试数据Tab.3 The test data of the second measurement in long range mode
4 结 论
空间近距离探测领域将会随着航天技术的进一步发展不断扩大,3D-TOF相机作为一种主动发光相位式测距成像敏感器,可以实时地获取目标的灰度与距离信息,具有结构小巧、实时获取等优点,本文对3D-TOF相机的工作机理作了简介并对其工作应用环境作了初步探究,同时通过测量试验得到了3D-TOF相机在目标测试应用中的测试精度和误差并对其进行了分析,从测试结果看出,3D-TOF相机在0~5 m的测试距离内,测量误差较小,具有很高的精度.综合考虑量程和测量误差,3D-TOF相机在空间近距离目标探测的工作距离应该在5m以内.这些研究为3D-TOF相机在航天领域近距离目标探测应用做了初步的探讨,并为这一技术的应用打下了基础.
