浅海背景下吊放声呐发现概率研究*
2019-03-01范赵鹏巩健文
范赵鹏,温 玮,巩健文,卢 翰
(海军航空大学山东 烟台 264001)
冷战结束后,各国海军的反潜重心都由深海向浅海转变,浅海反潜战成为一个热点问题。尤其是近年来,潜艇技术飞速发展,隐身能力越来越强,吊放声呐探测潜艇的难度越来越大。潜艇目标搜索仿真要建立数学模型进行模拟,利用随机数确定仿真中潜艇目标的初始位置并根据运动模型随机产生初始航向;判断潜艇是否在机载搜潜传感器的探测范围内。通过大量仿真之后,确定搜索过程中的搜潜概率,从而分析各种搜索方法在特定条件下的优劣[1]。但在一些仿真中,只要潜艇目标进入声呐作用距离半径圆就会提示发现目标,在大样本情况下体现不出随机性,这不符合实际情况[1]。
原因在于以下两点:1)以0-1决策方式决定声呐是否发现目标不够合理;2)蒙特卡洛法研究的基础是吊放声呐的作用距离一定,但是在实际环境中吊放声呐作用距离变化复杂,传播损失与距离不是单调递增的关系,作用距离的多少本身就属于吊声的一个指标,覆盖区域并不是一个规则的圆形;3)没有考虑声呐员发现目标是与训练水平和视觉停留有关。因此,本文通过对吊放声呐主动探潜模型的研究,构建更贴近实际的吊放声呐探潜模型,综合系统特性数据库、海洋环境数据库、平台特性数据库、目标特性数据库等信息,对浅海条件下吊放声呐探测发现概率进一步研究。
1 吊放声呐模型
浅海背景下主动声呐方程最一般的形式为:
SE=EL-(BL-PG)-DT
(1)
其中,EL为回波的声压级在回波持续时间上的平均;BL为背景的声压级在回波持续时间上的平均;PG是所有信号处理产生的信噪比增益。图1为吊放声呐主动探潜工作模型。
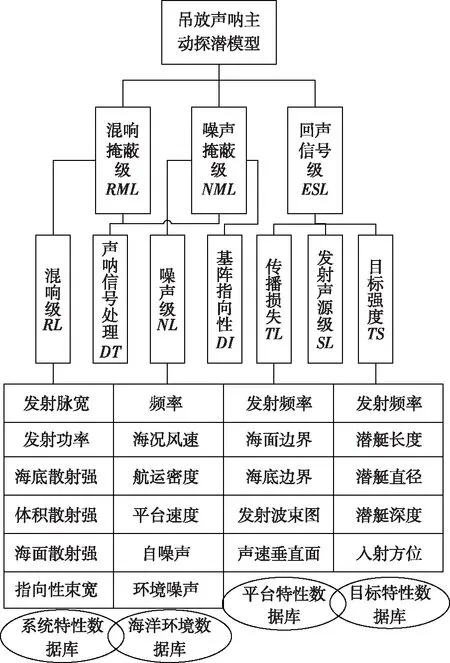
图1 吊放声呐主动探潜工作模型
回声信号级取决于声源级SL、传播损失TL和目标强度TS,于是有
EL=SL-2TL+TS
(2)
背景级是噪声和混响的混合由下式给出:
BL=10lgQB(τ)
(3)
式中,
QB(τ)=QN+QR(τ)
(4)
分别从海洋环境数据库、系统特性数据库、目标特性数据库、平台特性数据库提取数据进行分析。
2 基于Bellhop水声传播损失模型
射线理论具有高频近似性,声影区和焦散区就是相应几何近似处理中不符合实际情况而产生的。为了解决声影区和焦散区问题,以获得更符合实际的结果,许多学者对射线理论进行了修正,以平滑过渡到声影区和焦散区。1987年,Porter和Bucker从地震声学中引入了一种高斯声束跟踪方法,将声线看成按高斯统计分布的曲线束。每根高斯声束由一根中心声线及其周围具有高斯强度分布的区域构成[2]。高斯声束的声压场可表示为
(5)
其中,A为任意常数,η为离中心声线的法向距离,ω为声源角频率,p和q分别为动态声线方程的两个参数:
(6)
其中,cηη为声速沿声线的法向导数,用距离和深度方向上的导数表示为
(7)
高斯声束的束宽W和曲率K分别为
(8)
(9)
显然,束宽和曲率是随路径s而变化。于是,动态声线方程就可简单地用代表初始束宽和曲率的复数初始条件求解。初始条件可取
(10)
1996年,Weinberg和Keenan进一步改进了高斯声束近似处理,得
P(s,η)=A(s)φ(η,s)eiωτ(s)
(11)
(12)
(13)
传播时间τ可表示为声速倒数沿着声线曲线的积分在计算声压场时需要将以声线为中心的声压pf(s,n)转化为柱坐标系下的声压,pj(r,z)最终的声场由不同声线携带的能量叠加确定。声能叠加可采用非相干、半相干或者相干的方法计算。若采用半相干或者非相干的方法计算,则声压ps为
(14)
式中:u(θ)是与掠射角θ有关的声线振幅权重系数,N为特征声线的个数z0和c0分别为声源处的深度和声速。
若采用相干声场的计算方法,声压pc为
(15)
其中,N为特征声线的个数。这样最终的传播损失TL可表示为
(16)
3 背景级
3.1 浅海混响建模
相对于深海而言,浅海的水文环境更加复杂,吊放声呐在浅海中以主动方式工作时,通常会受到混响的干扰。研究浅海的混响特性,降低混响对吊放声呐主动探测的干扰,对浅海反潜具有十分重要的意义。
在浅海中或接近海底的接收设备,混响强度往往只需要考虑海底散射而忽略海面和体积散射,因此本文仅对海底混响进行研究。海底是一种具有复杂声学特性的界面,既是声波的有效反射体,也是声波的有效散射体。由于海底的起伏以及存在于海底附近的各种散射体的散射作用[3],投射到海底附近的声波将形成海底混响。海底混响级[4]
(17)
海底散射强度Sb因海底的粗糙不平整而形成,与海底的粗糙度有关。海底对声波的散射作用本质上就是将投射到海底的声能量在空间中进行重新分配[4]。Urick和Mackenzie先后证明,对于低频情况下当掠射角小于45°时,使用Lambert定律来处理散射强度与掠射角之间关系,能够很好地逼近实际海底散射的观测数据[5]
SB=10lgμ+10lg sin2θ
(18)
其中,SB表示海底散射强度(dB),μ表示海底散射常数,θ表示掠射角度,在宽带范围内进行的测量证实10lgμ为常数,可取-27dB。
3.2 海洋环境噪声建模
海洋环境噪声主要由风成噪声和降雨噪声构成,对两者采用平均谱级功率求和的方式得到海洋环境噪声谱级
(19)
风成噪声也被称为波浪噪声,是在风的作用下,由海面波浪运动而产生的噪声,其本质是分布于海洋表面的大量噪声源的辐射噪声在接收点的叠加,主要受风速影响。Kuperman和Ferla通过对实验数据的分析,拟合得到了风成噪声谱级的经验公式,可由下式表示:
(20)
式中,频率f单位是Hz,风速v单位是kn,与海况有关,计算时取表1中的值。

表1 风速与海况的关系
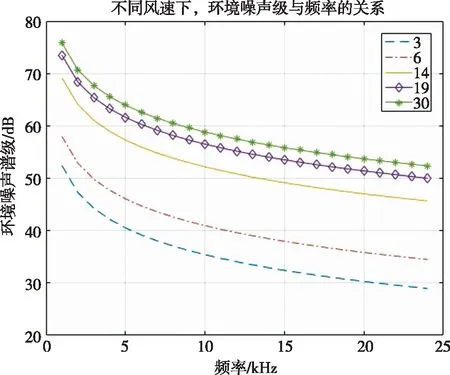
图2 不同风速下,环境噪声级与频率的关系
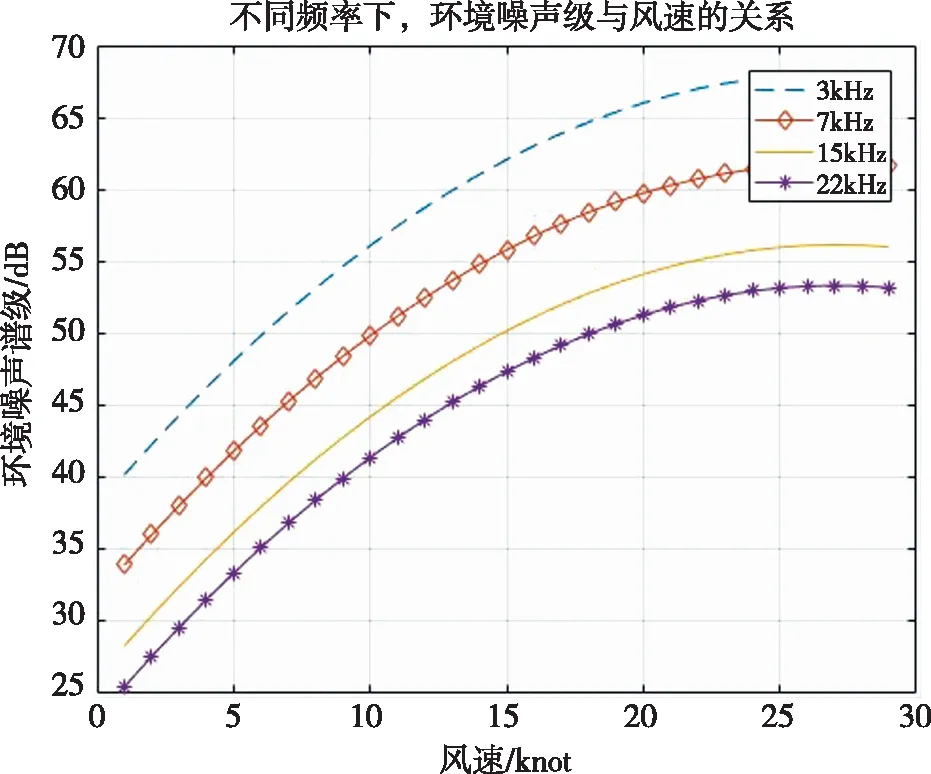
图3 不同频率下,环境噪声级与风速的关系
仿真条件:取吊放声呐声源级为SL=204 dB;频率分别为3 Hz、7 Hz、15 Hz、22 Hz;指向性指数DI=15 dB;检测阈DT=6 dB;目标强度TS=15 dB;水深H=150 m;混合层深度L=50 m;浅海有效衰减系数α-t=2.4;近场异常衰减KL=5.3;结果如图2-4所示。

图4 不同频率风速对吊放声呐作用距离的影响
环境噪声级与降雨率的关系[6]
NL=51.03+lg(R-rain)
(21)
仿真条件:频率为6 Hz,其余仿真参数与风速一样。结果如图5~6所示。
图5 海洋环境噪声级与降雨率的关系
图6 吊放声呐作用距离与降雨率的关系
4 回声级与潜艇目标强度分析
回声级取决于声源级SL,传播损失TL和目标强度TS,其中声源级[7]由下列公式
SL=171.6+10lg10P+DI
(22)
式中,171.6 dB表示距离点声源1码远处1 W产生的声功率171.6 dB;P为换能器辐射声功率,单位为W;DI为方向性指数。主动声呐是通过接收目标潜艇反射或散射的回波信号来实现对目标的探测、识别和跟踪。目标强度TS就是以声强的形式来描述目标潜艇回声特性的参数,其定义为
(23)
将潜艇看作是由一系列大小不同的圆柱体组成,将它们各自的目标强度求和得到总体TS,从而模拟出潜艇沿方位角变化的目标强度,这样根据不同型号的潜艇结构,可以估算出其目标强度,表中列出了几种典型潜艇的尺寸。
表2 几种典型潜艇的几何尺寸
现有敷瓦潜艇对高频脉冲信号吸收效果很好,从文献可知吸收系数可达0.9。
(24)
从上式最后一项可知敷瓦潜艇回声级削减10 dB,首尾120°范围内目标强度不到5 dB。
图1为根据潜艇目标强度模型仿真得到潜艇目标极坐标图,其中潜艇长度L=90 m,半径a=3 m,λ=15 m。
图7 不同降噪措施下潜艇目标强度仿真图
仿真条件:取吊放声呐声源级SL=204 dB;频率分别为2 kHz、4 kHz、8 kHz、10 kHz;指向性指数DI=0 dB;检测阈DT=6 dB;水深H=150 m;混合层深度L=50 m;浅海有效衰减系数α-t=2.4;近场异常衰减KL=5.3;海洋环境噪声级为NL=60 dB,结果如图8所示。

图8 不同频率下潜艇目标强度对吊放声呐作用距离的影响
5 吊放声呐探潜概率分析
5.1 瞬时探测概率
由于水声场的不确定性,吊放声呐在作用距离上存在着很大的起伏性,以作用距离来衡量吊放声呐的探测性能显然是不合适的。
探测概率是衡量吊放声呐探测性能的另一个重要依据。定义了回声余量YL,理论上讲,当YL=0时,表示此时在规定的检测阈下刚好能够完成探测;当YL<0时,将无法探测到目标;当YL>0时,声呐就一定能够探测到目标。而在实际情况中并非这样,即使YL>0,仍有可能探测不到目标,但回声余量的大小却反映了吊放声呐能够探测到目标的概率。假设当YL=0时,吊放声呐对潜艇的探测概率为0.5,YL<0时,吊放声呐对潜艇的探测概率为0[11]。那么在深度为H,距离为R的海区内,吊放声呐工作在a深度时,对航行在h深度上某一位置的潜艇的探测概率p(h)可表示为
(25)
5.2 累计发现概率
吊放声呐接收机不是靠一个回波脉冲实现目标检测,而是根据一串回波脉冲的观察做出判决,这是一个脉冲积累的过程。此过程是显示器余辉和操纵员的视觉暂留来实现的。若要求N次检测中至少有一次过门限即为发现目标,则在N的次数足够多的情况下会带来过高虚警率,若要求N次检测中有N次过门限,则在降低虚警率的同时会牺牲检测概率。在两个极端的情况下取折中,即N次检测中有M次过门限。其中1≤M≤N。N值给定的情况下,可以通过调整参数M来得到最佳的检测性能。这一方法国外学者Reibman and Nolte,Weiner,Shnidman,给予了分析[11-14]。Reibman and Nolte提出在存在信号加噪声的情况下,进行N次相互独立的观测,有M次或者更多次过门限的检测概率为
(26)
只存在噪声时的虚警概率为
(27)
Weiner计算了在固定N值下的检测阈与M的关系,表明存在一个最佳的M可以最小化门限的值。Shnidman提出来了最佳M值的近似表达式[15]。这些近似表达式在10≤N≤500范围中误差小于10%,如下所示
M0≈100.8N-0.02
(28)
M2≈100.91N-0.38
(29)
M4≈100.873N-0.27
(30)
式中,下标表示施威林类型Weston在选取取值时提出只需较少的过阈值次数即可确定有目标存在[16-17]。
5.3 多次亮点探测假设模型
利用返回的数据,声呐操作员必须解读信息进行判决,通常用“有目标”和“没有目标”的形式来表示。声呐员的训练水平和视觉识别概率对发现目标均会造成一定影响,在这里提出声呐员发现系数b0。根据实际,在声呐员第一次发现目标后,对相同位置的回波会产生一定警觉,所以假设第一次发现后的多次发现回波概率均为1,那么在同等训练水平条件下,声呐员发现系数只对第一次的发现概率产生影响。
对于N次独立观测的情况,根据Shnidman提出的近似式,若有K次出现亮点,则判断发现目标,此概率为
1)全部接收全部回波:
F(N)=p1·p2…pn
(31)
2)能够接收其中N-1次回波的概率
(32)
3)接收到其中K次回波的概率为
(33)
发现概率为以上情况之和与声呐员系数的乘积:
FN=(F(N)+F(N-1)+…F(K))·b0
(34)
6 结束语
航空吊放声呐发现概率与海洋环境特性、潜艇目标特性、设备性能、判决策略有直接关联。若要贴近实战,装备模型构建需贴近实装、海洋声传播特性需详细分析、潜艇目标数据要全面掌握、判决策略需准确构建。论文通过构建吊放声呐探测模型对影响因素仿真分析,提出考虑了海洋环境和设备性能且添加战术运用的发现概率模型。定义声呐员系数并构建多次亮点探测假设模型,使吊放声呐搜索仿真更贴近实际。
