基于爆炸声源的多基地远程探测技术研究
2019-03-01魏明涛孙振新
刘 琳,魏明涛,孙振新
(1. 中国人民解放军91776部队,北京 100841; 2. 江苏自动化研究所,江苏连云港 222061)
水面舰艇编队是水下攻防的重要力量,在与水下威胁目标的对抗中,面临的首要困难在于难以远程发现和准确识别水下威胁目标[1]。水面舰艇配备的舰壳声呐对低噪声潜艇目标的实际探测距离较近,连续跟踪能力差,难以满足作战需要[2]。拖曳阵声呐被动工作模式对低航速低噪声潜艇探测能力差[3]。拖曳阵声呐采用主动工作模式时,通过发射大功率低频声波,其发现水下目标的距离及连续跟踪能力有大幅提升,但是该模式下水面舰艇易于过早暴露、遭受攻击[4]。
根据当前水下作战对潜远程预警与攻防的重要需求,针对水面舰艇配备声呐主动探测易暴露,被动探测距离近的现实问题,在综合分析国内外先进做法基础上[5-6],本文提出了一种基于爆炸声源的多基地远程探测新技术。该技术综合利用爆炸声源和拖曳线列阵声呐实施对水下目标的远程探测,通过爆炸声源产生高强度低频爆炸声信号,利用大孔径低频拖曳线列阵声呐进行高增益接收,结合对潜艇回波与直达波的参数提取与处理,同步完成对潜艇目标的快速检测与定位。
1 探测技术原理
如图1所示,以小当量TNT爆炸产生的声波为声源,利用舰船平台的拖曳线列阵被动接收声波,组成相当于异地收发功能的水声探测系统。爆炸产生的声波通过2条路径被拖曳线列阵检测到:一条是由爆炸点D直接传到拖曳线列阵A的直达波;另一条是由爆炸点D经潜艇目标M反射后再传到拖曳线列阵A的目标回波。拖曳线列阵根据接收的直达波和目标回波的时间,根据声呐方程和解析几何二次曲线的特性分析,可知M点位于以A、D为两焦点的椭圆上。另外,相对于常规声呐产生的声波,小当量TNT爆炸产生的声波具有以下特点:一是特制爆炸声源在确定位置爆炸,能产生全向、低频强声波信号;二是爆炸产生的声波能量大小可控;三是爆炸产生的能量包含的频谱范围广。
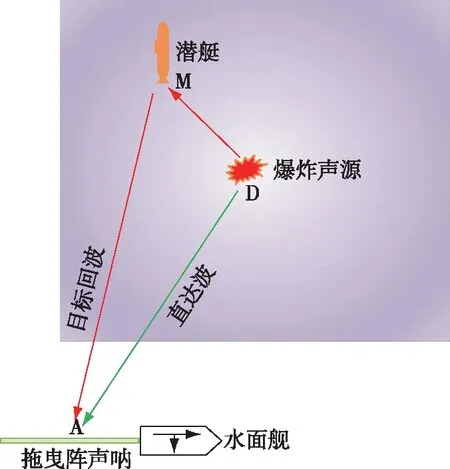
图1 基于爆炸声源的多基地探测原理图
2 爆炸声源的声波研究
2.1 爆炸声源的声波测量
为了对海水中爆炸声波的声源级、频谱进行测量,建立声波信号采集系统,如图2所示。测量分为三个阶段,第一阶段为准备阶段,包括测量海面风速,水温,确定是否符合测量条件,并且要求测量水域没有其他船只的干扰。第二阶段为测量系统准备阶段,包括测量经纬度、水深、海面风速、水温、盐度并根据经验公式得到声速剖面分布。第三阶段为测量阶段,测量时母船和小艇都必须熄火抛锚。启动测量记录系统,并示意母船发射爆炸声源,利用示波器检测爆炸信号同时保存接收数据,并按照要求重复测量记录。
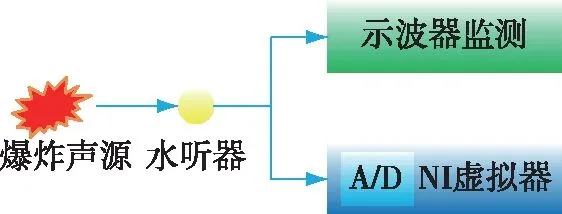
图2 声波信号采集系统示意图
本文以700 g TNT爆炸声场数据为例进行分析处理,根据测量数据,经计算得声源级曲线如图3所示。由于声源爆炸点与测量点之间距离较长,传输信道并不满足球面波扩展条件;另一方面,由于测量时测量船仍保持航行状态,接收水听器和电缆布放入水后无法保持垂直状态,其深度未达到预定的测量深度,上述因素对实际测量声源级数据的准确性造成一定影响。
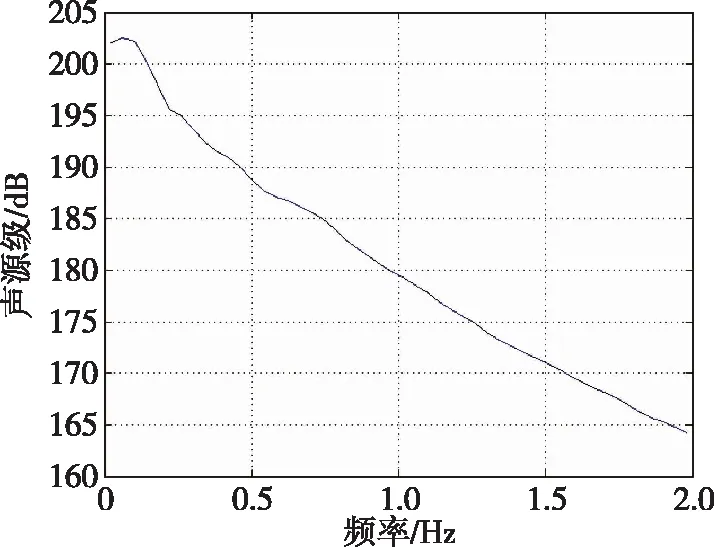
图3 700 g TNT爆炸声源级曲线
对上述试验数据计算接收时刻的能量谱,能量谱如图4所示。从功率谱线图可知,爆炸声源的声波能量大部分集中在低频段区域。
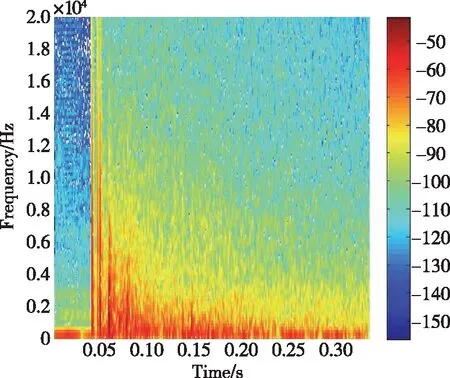
图4 700 g TNT爆炸功率谱线图
2.2 爆炸声源的回波信号处理
某次试验时,700 g TNT爆炸产生的直达波和目标回波,如图5所示,该图给出了回波数据的方位距离信息。可以看出,由于装药量较小,爆炸产生的脉冲长度较短,能提高探测目标的距离分辨率。
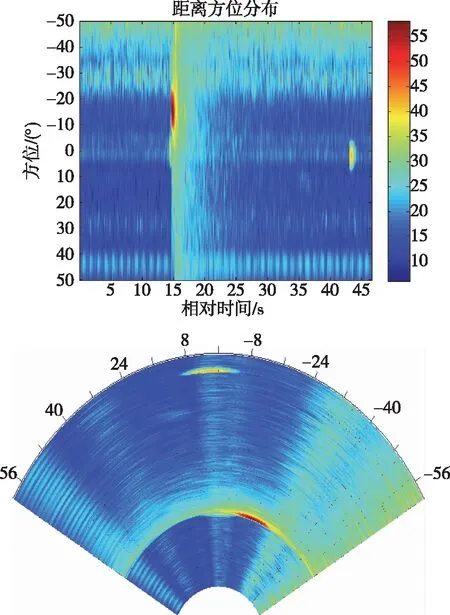
图5 某次试验的直达波和目标回波分布
3 探测能力仿真分析
3.1 仿真系统构建
构建爆炸声源/拖曳阵声呐探测能力仿真系统,框架如图6所示,共包含以下几个部分:
1)仿真参数设定:设定各项位置参数、海洋信道参数和信号处理参数;
2)爆炸声源仿真:仿真爆炸声源声波波形;
3)传输路径仿真:爆炸声源声波通过声场调制路径传输至目标,并通过目标散射再次通过声场调制路径传输至阵列;
4)目标散射特性仿真:仿真爆炸声源照射不同姿态下目标后的信号调制情况,查阅消声瓦对于不同频率声波吸收情况的相关技术资料[7];
5)接收阵列仿真:仿真拖曳线列阵对信号的接收;
6)信号处理系统仿真:通过信号处理,检测直达波、目标回波,并解算目标位置;
7)显示系统仿真:通过友好的人机交互界面将处理结果完美显示。
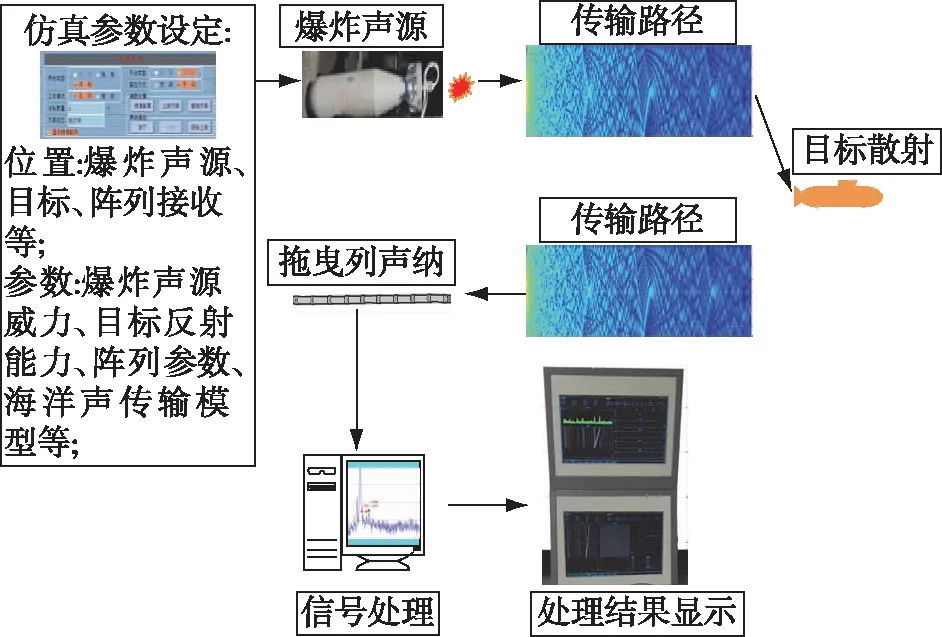
图6 探测能力仿真系统框图
3.2 探测能力仿真
为了客观评估爆炸声源/拖曳阵声呐系统的探测能力,根据声呐方程对于系统能力进行仿真评估,并与常规多基地声呐系统进行比较。
具体目标距离r测算公式为:
系统优质因数FOM=爆炸声源级-海洋背景噪声+目标反射强度+阵列得益-检测信噪比
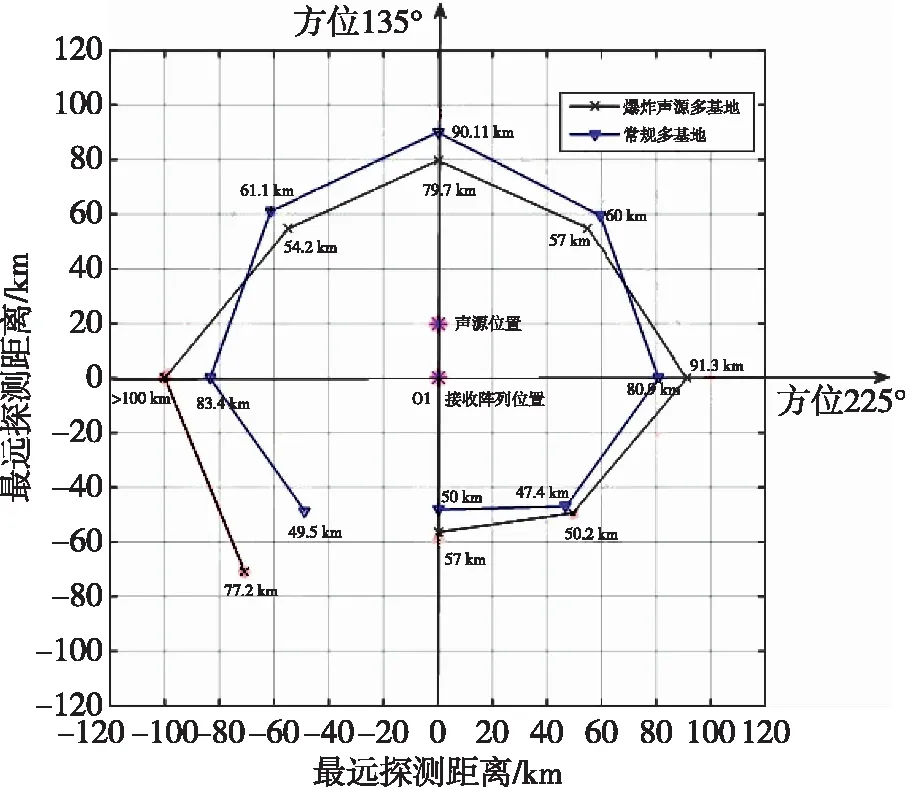
为计算r,根据不等式:20log(r/2)×2+海水吸收 1)仿真地点 以某海域半径100 km的区域为仿真地点,该域100~200 Hz的海洋声传播损失如图7所示。 图7 某海域100~200 Hz的声传播损失 2)仿真结果 假定水深100 m,目标深度50 m,爆炸声源深度50 m,根据典型拖曳线列阵的相关参数,在爆炸声源和拖曳线列阵位置态势确定后,系统探测能力仿真结果如图8所示,从图得到:在75°~200°方位,即爆炸声源所在一侧的方位上,常规多基地声呐系统的探测能力强于爆炸声源/拖曳阵声呐系统。这是因为在这一侧声波传输的距离近,常规多基地探测系统的高频声波衰减小,其脉冲压缩增益相比爆炸声源/拖曳阵声呐占优势;在0°~45°、225°~360°方位上,即爆炸声源异侧方位上,爆炸声源/拖曳阵声呐系统探测能力强于常规多基地声呐系统,这是因为在这一侧声波传输的距离长, 常规多基地声呐系统的高频声波衰减大,爆炸声源/拖曳阵声呐系统中爆炸声源的低频声波衰减小使其探测占优势。 图8 两种多基地方式对各方位目标最远探测距离对比 水面舰艇进入敌潜艇威胁海域时,配备的常规拖曳阵声呐通常处于被动工作模式,能够实时探测到潜艇方位信息,此时如果由于作战需要,需要掌握敌潜艇的目标运动要素(方位、距离、速度、航向等),需要投放爆炸声源,获取目标当前距离信息。根据当前目标距离和实时方位信息,可以解算目标运动态势。 设ti时刻在测得目标方位Bi的同时,又测得目标距离Di。以声呐发现目标时刻的本舰初始位置W0点为坐标原点,并以该时刻声呐测量的目标初始方位线B0为坐标纵轴建立直角坐标系。如图9所示,设t0时刻本舰位于W0点,目标位于M0点,目标方位为B0,距离为D0,舷角为Xm0,且假定目标以等速Vm沿直航向Cm航行。ti时刻本舰位于Wi点,目标位于Mi点,目标方位为Bi、距离为Di,目标方位变化量为ΔBi=Bi-B0,此时的本舰纵移和横移分别为J0ic、J0is。 将本舰与目标运动构成的几何态势图形各边参量投影在坐标纵、横轴上可得 (1) 设P=D0,Q=VmsinXm0,R=VmcosXm0,并替换式(1)右端有关项,经整理得 PsinΔBi-Qt0icosΔBi-Rt0isinΔBi-J0iCsinΔBi+J0iScosΔBi=0 (2) 由于声呐跟踪测量的目标方位必然存在一定误差,系统累计的本舰位移也必然存在一定误差,因此,在通常情况下式(2)是不成立的。设式(2)右端为某一小误差量εi。在拖曳阵声呐对目标保持连续跟踪条件下可得到目标方位序列,在此过程中系统根据导航设备提供的本舰航向、速度及按时间累计得到对应的本舰位移序列,不难得到数个完全相同的表达式,经过相关代换并整理得到: (3) 最终得解: (4) 图9 本舰与目标几何态势 仿真计算采用某典型态势,如图10所示,参数选取如:初始距离20 km,目标航向240°,目标速度5 kn,采样周期3 s,本舰航速25 kn,本舰航向90°。 方位随机误差为σB=2°(二阶原点矩),距离随机误差为2.5%D。 通过三次引爆声源获取第48、72、96个采样周期时刻的目标距离信息,图11、图12是该最小二乘算法下的目标航向、航速收敛效果。综合比较各种典型态势下目标运动航迹与目标运动要素收敛效果,发现当目标方位变化率越快,目标运动要素解算值收敛效果越好。 图10 某典型态势图 图11 航向仿真结果对比 图12 航速仿真结果对比 因此,当利用基于爆炸声源的多基地模式实现对潜远程探测时,应通过控制本舰机动采用适当的接敌跟踪航路,使目标方位有较快的变化率,这样就可以较为准确地解算出目标运动要素,并采用适当武器进行攻击。 本文针对未来反潜作战接触距离更远,实施攻击的速度更高,反潜持续的时间更长等重要需求,提出一种基于爆炸声源的多基地远程探测新方式。该技术通过灵活投放高强度低频爆炸声源与拖曳线列阵声呐相结合,充分发挥分布式探测模式能力,在保证水面舰艇隐蔽条件下,实现对潜艇目标的远距离预警、 跟踪和攻击。该技术具有以下特点:一是爆炸声源能量强、频率低、海洋吸收损失小,显著降低潜艇的非对称隐身作战优势,实现对潜艇的远距离探测;二是爆炸声源可较远的灵活投放,爆炸点与水面舰艇相隔较远,可实现水面舰艇保持隐蔽,增加了潜艇对水面舰艇的识别难度,有效降低潜艇攻击单向优势;三是现有的拖曳线列阵声呐经适度改进信号处理算法,即可与爆炸声源配套使用实现远程探潜,装备改动量小。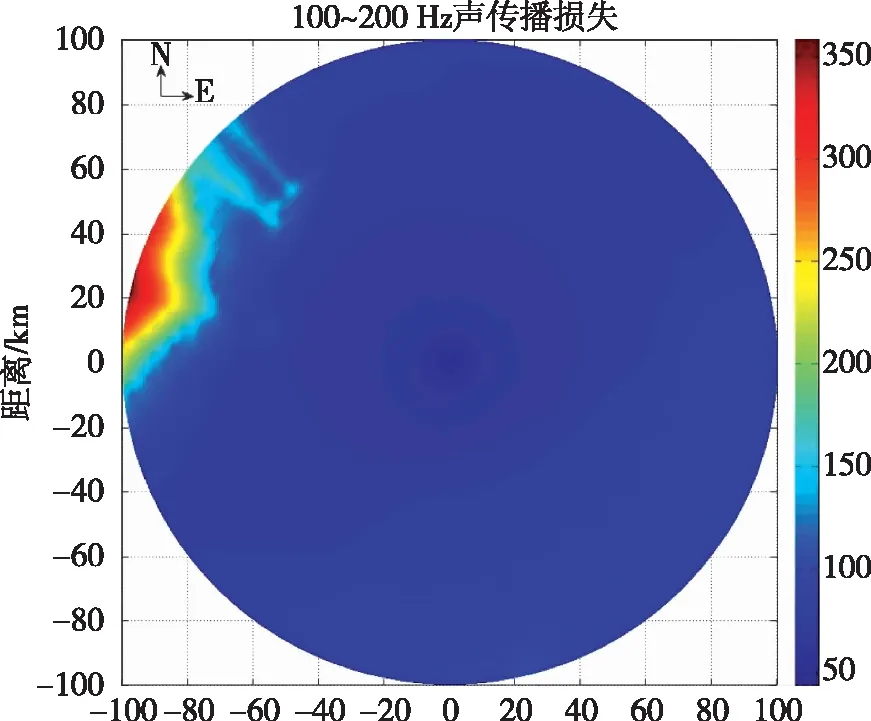
4 爆炸声源探测模式的目标运动要素算法
4.1 模型建立


4.2 仿真计算


5 结束语
