自动化监测在高铁桥墩纠偏施工中的应用
2019-02-28郑勇波
郑勇波
(1.上海京海工程技术有限公司,上海 200125; 2.同济大学地下建筑与工程系,上海 200092)
1 引 言
高架桥是高铁工程中最常用的一种结构形式。高铁线路往往位于城郊或农村,无法进行全天候管理,即使封闭,影响范围内仍经常出现违法土堆载或卸载现象,从而导致高架桥桥墩产生较大侧向位移。因高铁列车对轨道的定位精度要求很高,位移量超出一定范围,对应线路即会降速运行甚至停运。
某段高铁高架桥由于受到堆土和右侧新开河道的影响,导致桥墩发生侧向位移。为把桥墩反向纠偏至原位置,需在开挖河流的一侧设置高压旋喷桩,利用旋喷桩的喷射压力对土体的挤压作用带动桥梁基础偏移,以达到桥梁结构的整体纠偏作用。
高铁桥墩纠偏施工只能在凌晨运营天窗时间段内进行,而且土体挤压作用存在一定的滞后效应,为准确控制桥墩和梁体纠偏量和实时了解其最终变形状态,需对桥墩和梁体进行自动化监测。目的在于把施工引起的结构变形动态信息及时反馈给施工单位,使之能够在现场及时调整纠偏施工推进速率,优化和改进施工方法,确保高铁高架桥结构的安全。
2 工程概况
本段高铁高架桥含5个桥墩,上部结构为简支箱梁,桥墩高约 21.0 m~23.0 m,基础采用钻孔灌注桩,桩长约 67.5 m~70.5 m。工程区域位于上海市松江区,属于滨海平原地区,地形平坦,地面高程一般为 1.5 m~3.0 m,沿线基本为农田、村舍。区域内土层为典型的上海深厚软土层,主要有①1人工填土层、②2黏土层、③1淤泥质粉质黏土层、④淤泥质黏土层、⑤1黏土层、⑥1黏土层、⑥2粉质黏土层、⑦1粉土层及⑦2粉细砂层。地下水因大气降水及地表水的补给,水量较丰富,埋深一般为 0.2 m~1.5 m。工程所处区域地震动峰值加速度为 0.1 g,地震动反应谱的特征周期为 0.35 s。
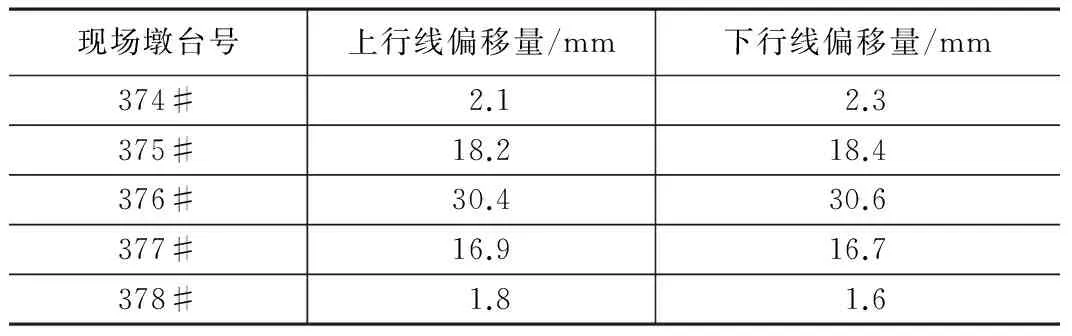
线路偏移量一览表 表1
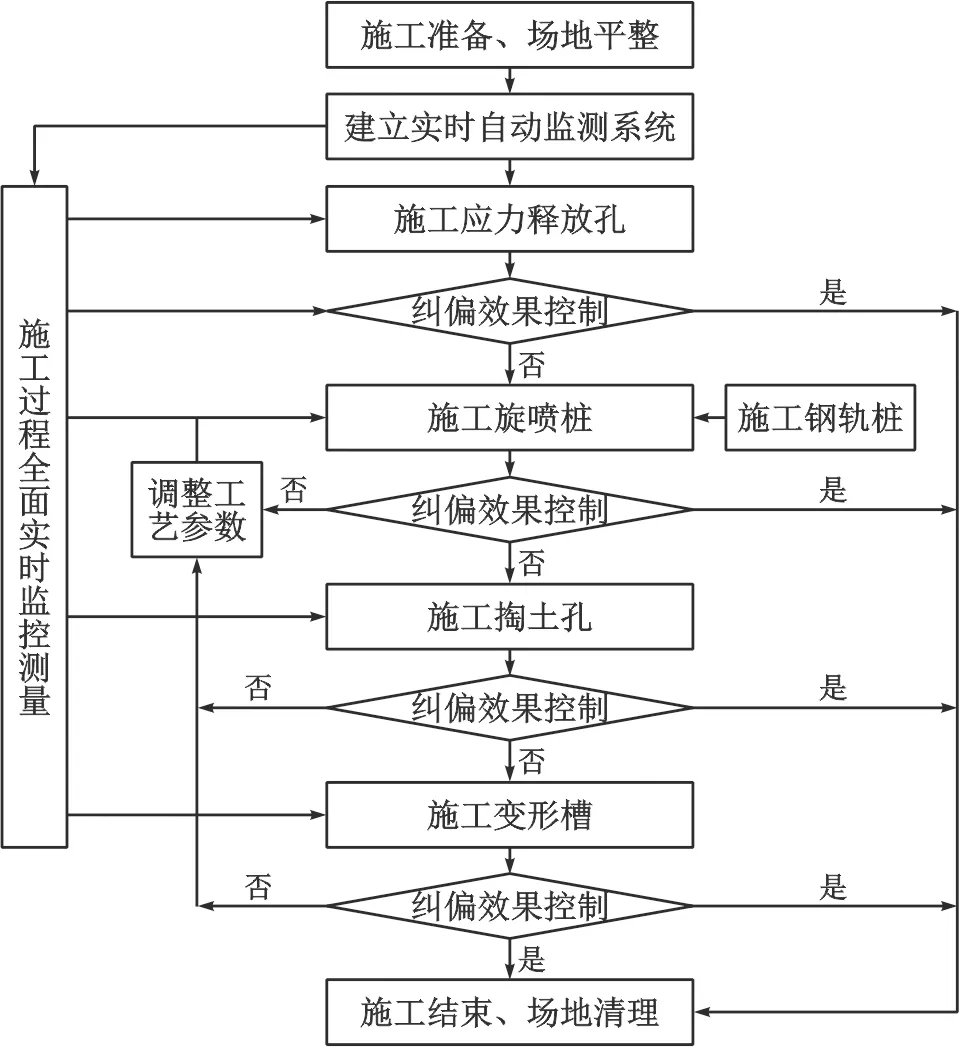
图1 自动化监测与施工工况关系
根据5个桥墩对应的高铁线路运营期变形数据,并考虑线路扣件调整量,线路横向偏差情况如表1所示,偏移量以垂直线路方向为主。主要施工工序如下:施工应力释放孔→施工钢板桩→施工旋喷桩→施工掏土孔→施工变形槽,每个工况完成即根据自动化监测数据进行纠偏效果评估,并及时调整施工工艺。自动化监测与施工工况的具体关系如图1所示。
3 监测系统
3.1 数据采集
本次监测采用独立平面坐标系统,以沿高铁线路方向为X轴,与线路垂直方向为Y轴。平面坐标系统实际建立时,先假定起始方位角,建立一个坐标系统,然后在CAD图中将坐标轴旋转至监测用独立平面坐标系统,再根据旋转的角度调整起始方位角,从而建立满足定向要求的平面坐标系。监测基准网采用边角网的形式建立,包括1个工作站及3个基准点。工作站选择施工区域外相对稳定、方便使用的位置,并同时与监测点通视。基准点布设在轨道交通线路两侧,远离施工区域,采用强制观测墩结合观测标架的方式布设,使其与基准点近似成等边三角形。采用徕卡测量机器人TM30进行观测,观测时,仪器架设在工作站上,监测期间不许搬动,工作房24小时派人值守。工作站及仪器布置示意图如图2所示。

图2 工作站及仪器布置
根据高架桥结构形式,在每个桥墩和梁体上布置4个自动化监测点,以反映该桥墩及其梁体位移变化量。由于现场承台覆土较厚,不利于观测,同时考虑监测的全面性,因此将位移监测点埋设在墩身下部和顶部以及梁体两端。此外,为精确测量每个桥墩的沉降量,还在每个桥墩的底部位置布设一个沉降观测点,某个墩台点位布置情况如图3所示。监测范围内总计5个桥墩,监测点整体分布示意图如图4所示。
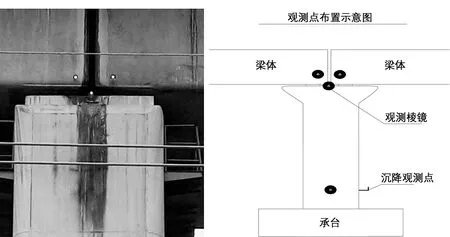
图3墩台监测点布置
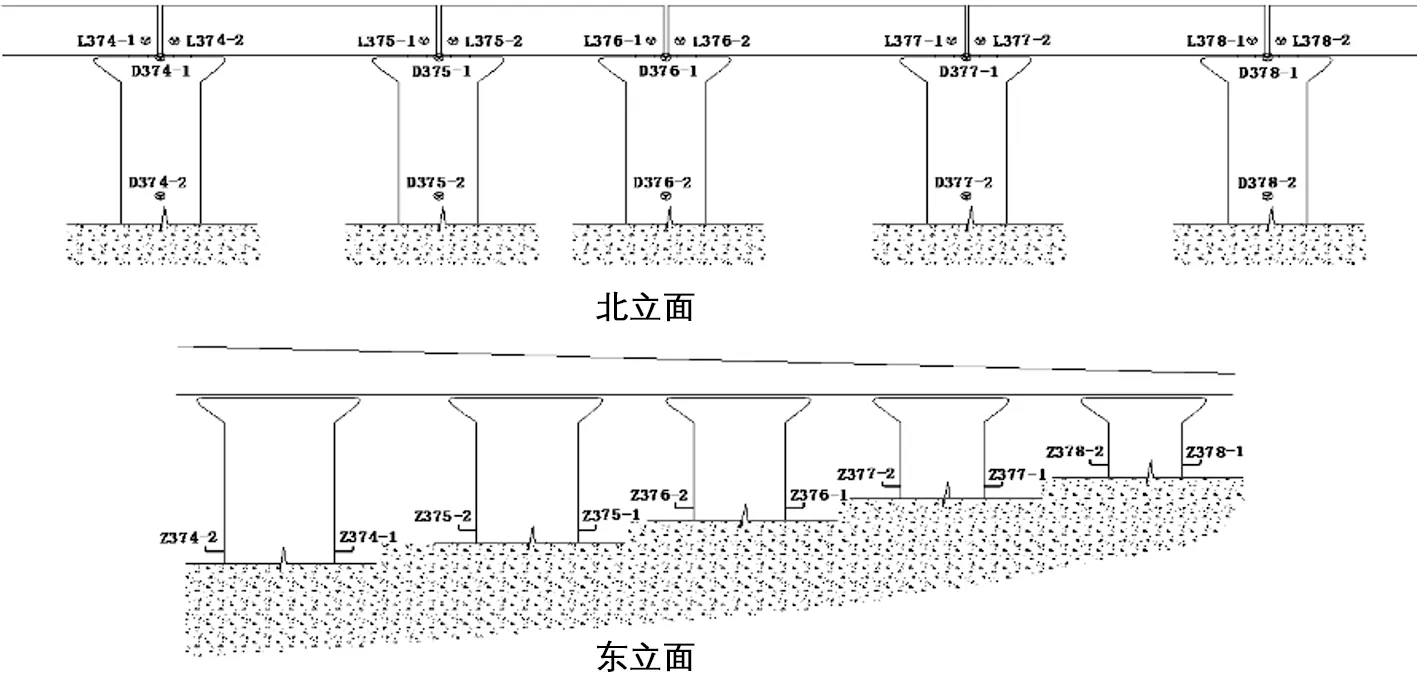
图4 监测点分布示意图
本次所采用自动变形监测系统主要由数据采集、数据传输、控制系统、告警系统、数据处理、数据分析和数据管理等部分组成,图5所示为系统组成示意图。自动化观测基本过程:首先,TM30测量机器人架设在工作站上,瞄准基准点,采用后方交会的方法检查工作站的站点坐标。接着,采用全圆观测法测量各监测点的角度与距离,然后将测量的原始数据通过网络模块传输到后台处理软件,进行数据自动平差和变形曲线的绘制,处理过程详见3.2节。学习测量之后的后续监测过程均由仪器自动完成。
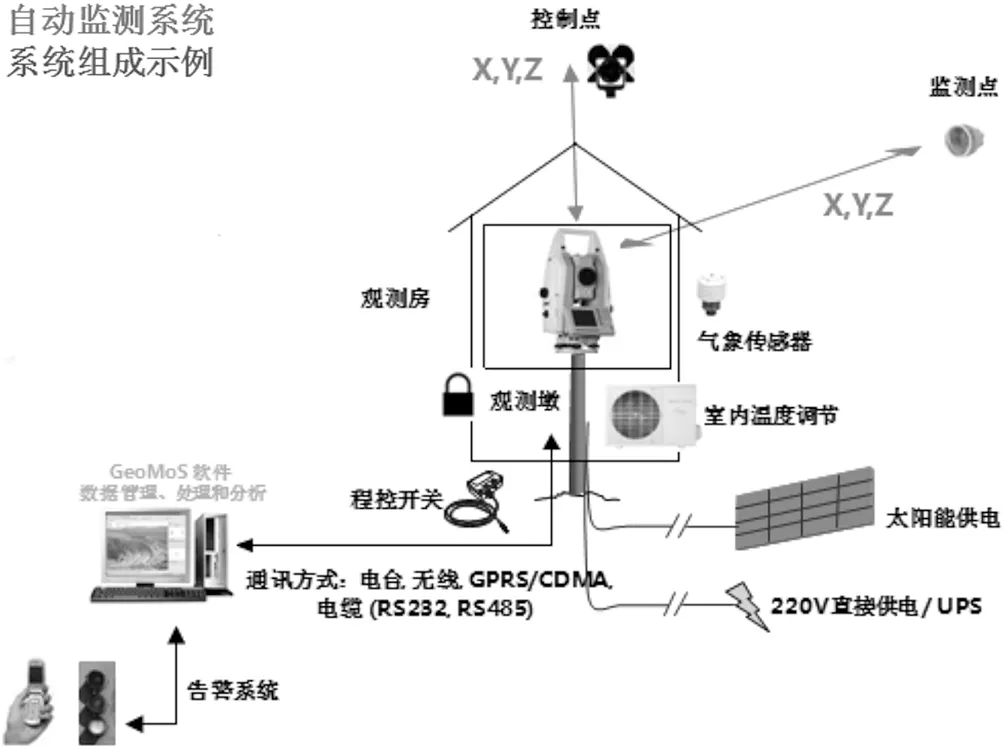
图5 自动化监测系统组成
3.2 数据处理
采用极坐标法观测直接获得变形点三维坐标,再对施测结果进行差分处理。即:按极坐标的方法测量测站点(基准点)至其他基准点和变形点的斜距、水平角和垂直角,将测站点至具有代表性气象条件的基准点测量值与其基准值(基准点测量或复测值)相比,求得差值。
(1)距离的差分改正
(1)
改良Jaslow技术下单枚Z-cage联合单侧椎弓根螺钉固定治疗腰椎间盘突出症(单鸿剑,等)11:988
(2)
(2)球气差的改正
如上述的距离测量一样,如果某一时刻测得监测站与某基准点间的单向三角高差hJ为:
hJ=dJ×sinα+iJ-aJ
(3)
式中:α—垂直角,iJ—仪器高,aJ—棱镜高。
那么,根据下式可求出球气差改正系数c:
(4)
按下式可求出变形点与监测站之间经球气差改正的三角高差△hp:
(5)

(6)
(3)方位角的差分改正
(7)
(8)
(4)变形点三维坐标和变形量的计算
综合以上各项差分改正,按极坐标计算公式可准确求出每周期各变形点的三维坐标。
(9)
式中:X0、Y0、Z0——监测站的坐标值。
(10)
4 监测数据分析
本次监测于2015年6月27日完成初始值采集工作,自6月28日起开始进行全面监测,至8月11日20时监测工作结束,桥墩和梁体位移共监测446次。至最后一次观测时,375#桥墩纠偏量为 18 mm,对应梁体纠偏量为 16.9 mm;376#桥墩纠偏量为 28.5 mm,对应梁体纠偏量为 29.6 mm;377#桥墩纠偏量为 17.3 mm,对应梁体纠偏量为 15.6 mm。整体来看,与表1所述的线路偏移量基本一致,说明纠偏达到预期目的。梁体的梁体X方向、梁体Y方向、桥墩X方向及桥墩Y方向位移累计变化量-时间曲线图分别如图6~图9所示。
分析曲线图可知,所有梁体和桥墩位移日变化量均小于 4.0 mm。其中,梁体位移在7月2日3时L376-1、L376-2、L377-1、L377-2日变化量分别达到 3.1 mm、3.1 mm、3.2 mm、3.3 mm;7月28日3时L376-1、L376-2、L377-1、L377-2日变化量分别达到 3.2 mm、3.1 mm、3.1 mm、3.3 mm;8月5日3时30分L376-1、L376-2日变化量分别达到3.1 mm、3.2 mm。桥墩位移在7月2日3时D376-1、D377-1、D377-2日变化量分别达到3.1 mm、3.3 mm、3.4 mm;7月28日3时D376-1、D377-1、D377-2日变化量分别达到3.1 mm、3.5 mm、3.0 mm;8月3日3时D376-2日变化量达到 3.8 mm;8月5日3时30分D376-1、D376-2日变化量分别达到 3.3 mm、3.6 mm;8月6日3时D376-1、D376-2日变化量分别达到3.2 mm、3.8 mm;8月7日3时D376-2日变化量达到 3.5 mm。
上述情况出现后,立即进行加密监测,同时施工方也高度重视,及时调整施工工艺,直至施工结束,没有发现位移继续增大的情况。后经分析,上述现象发生主要是旋喷桩距离桥墩越来越近,喷浆压力加大所致。
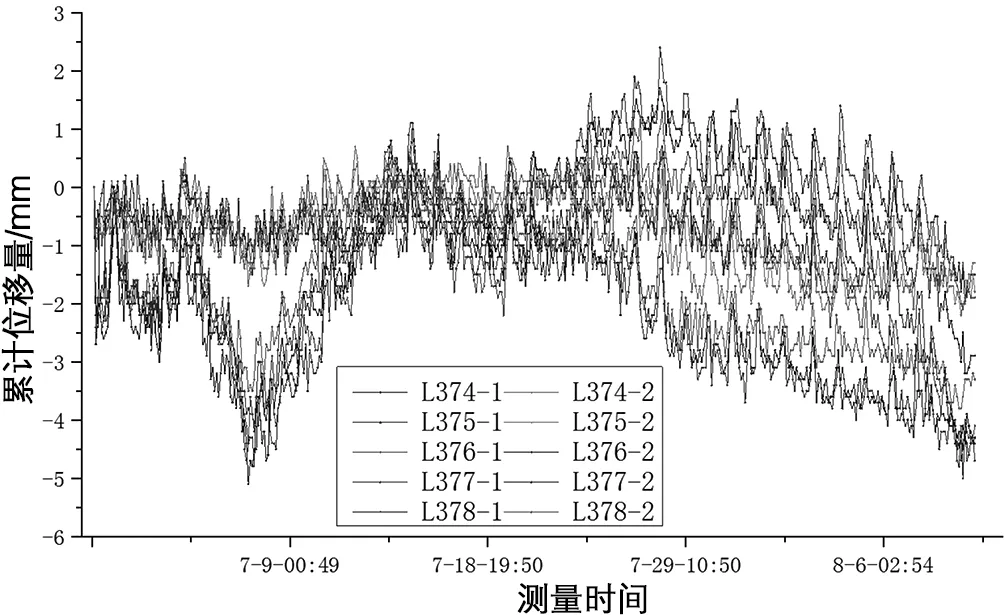
图6 梁体X方向位移累计变化量-时间曲线
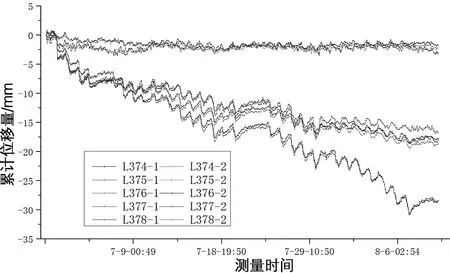
图7 梁体Y方向位移累计变化量-时间曲线
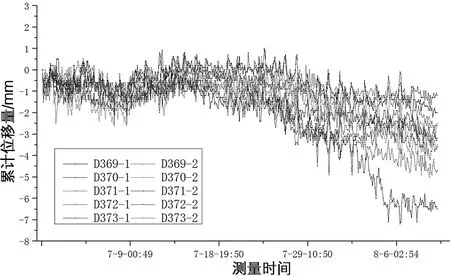
图8 桥墩X方向位移累计变化量-时间曲线
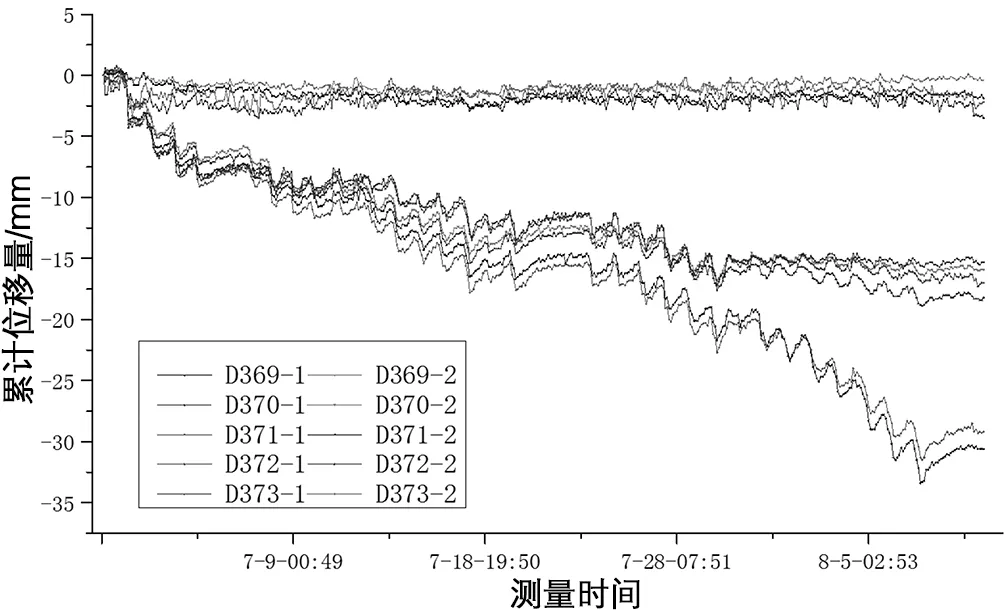
图9 桥墩Y方向位移累计变化量-时间曲线
5 结 论
本文研究所取得的有价值结论主要有:
(1)针对高架桥纠偏施工的特点和要求进行自动监测系统设计,满足后续施工控制对位移数据及时性和准确性的要求。
(2)纠偏作业过程中,自动化监测数据均实时和准确反映了高架桥结构的位移量,说明自动化监测技术在高架桥工程纠偏施工中应用是可行的。
(3)纠偏施工的控制关键在于旋喷浆液压力的控制,根据自动化监测数据实时调整施工参数和施工工艺很有必要。
