九开关变换器单管短路时驱动六相PMSM容错控制∗
2019-02-27刘陵顺李永恒
刘陵顺 胡 光 李永恒
(海军航空大学航空基础学院 烟台 264001)
1 引言
背靠背变换器由十二个开关管构成,生产成本高,体积庞大。为了减小体积、降低生产成本,提出了九开关变换器[1]。双Y移30°永磁同步电机具有低压大功率输出、可靠性强、转矩脉动小等优点,在全电舰船[2]等领域得到了广泛应用。
近年来,很多学者对变换器的故障诊断和容错控制展开了深入研究。王真对三电平逆变器的容错控制进行了研究[3];黄凯研究了三相四电平逆变器的故障诊断和容错控制[4];高宏伟对五相变换器发生故障后的控制进行了研究[5]。以上均是以传统变换器为研究对象,对于九开关变换器短路故障的研究还不够深入。
本文针对九开关变换器单管短路的情况,研究了适用于六相永磁同步电机的空间矢量脉宽调制(SVPWM)算法,对变换器进行容错控制。
2 九开关变换器
根据图2中九开关变换器的拓扑结构,正常情况下每条支路开关管的通断必须符合相应的约束。约束条件有两个:一是同一时刻同一支路只有两个开关管开通,中间开关管的通断由上、下两个开关管经“异或”运算控制;二是任意时刻的支路电压VAN和VDN必须满足条件,VAN≥VDN。这是九开关变换器正常工作的基本原则[6]。

图1 基于九开关变换器的双Y移30°永磁同步电机驱动系统

图2 九开关变换器拓扑结构
表1中是九开关变换器某一支路上三个开关管的开关状态及支路电压。其中,Vdc表示直流侧的电压大小,VAN、VDN分别表示A点、D点相对于直流侧负极的电压大小,可得,VAN≥VDN。
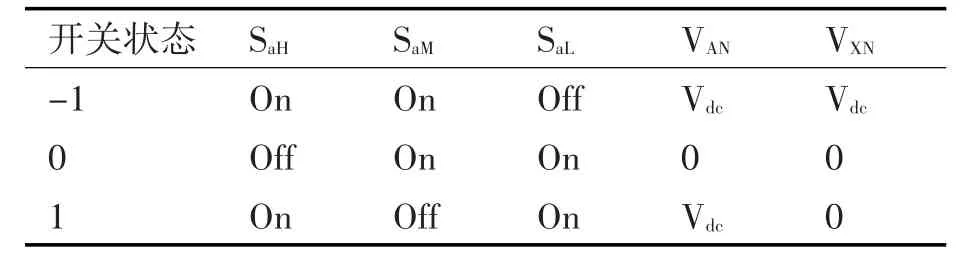
表1 九开关变换器开关状态
结合背靠背变换器以及九开关变换器的工作原理,得出九开关变换器正常工作时开关序列,如图3所示。
图3中黑色圆代表1,即开关管导通;白色圆代表0,即开关管关断。
结合表1和图3,可以绘制出九开关变换器在α-β平面的电压空间矢量图,如图4所示。
当九开关变换的某一支路上一个开关管发生短路故障时,包括三种情况,即上中下三个开关管分别短路,如图5所示。选取第二种情况即中间开关管短路时展开研究。

图3 九开关变换器开关序列
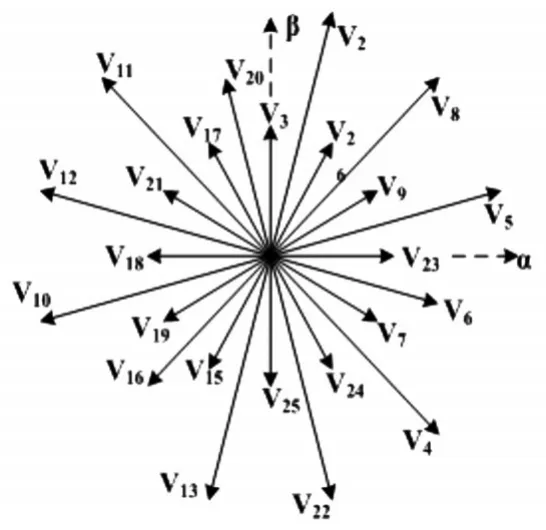
图4 九开关变换器电压空间矢量图
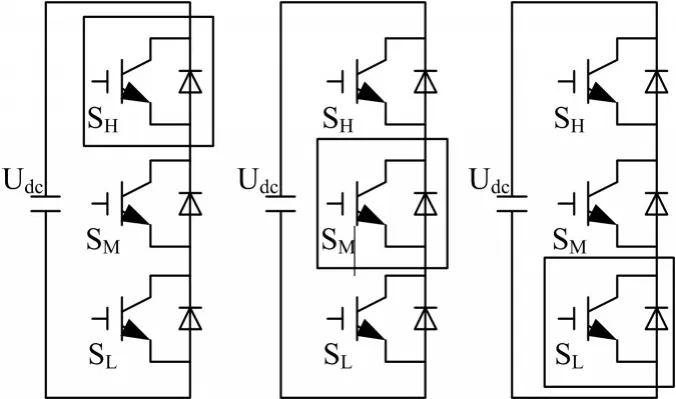
图5 九开关变换器单管短路图
当某一支路的中间开关管短路时,根据九开关变换器工作的基本原则,同时为了保护电路,剩余两个开关管不能同时导通[7],所以此时支路的开关模式有两种,如表2所示。
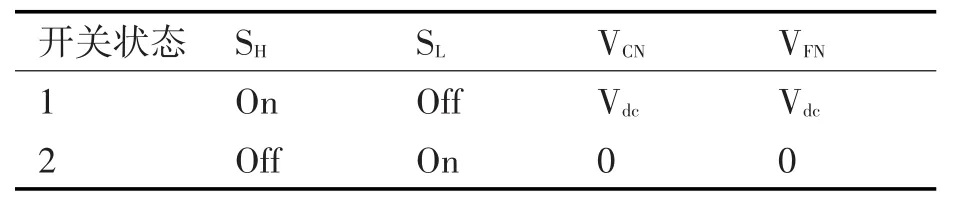
表2 单管短路后开关模式
其他两支路正常工作,开关方式没有改变,按照正常工作时的基本原则。因此依照表1、表2和图3,可以得出九开关变换器在第三支路的中间开关管短路后α-β子平面的电压空间矢量图,如图6所示。
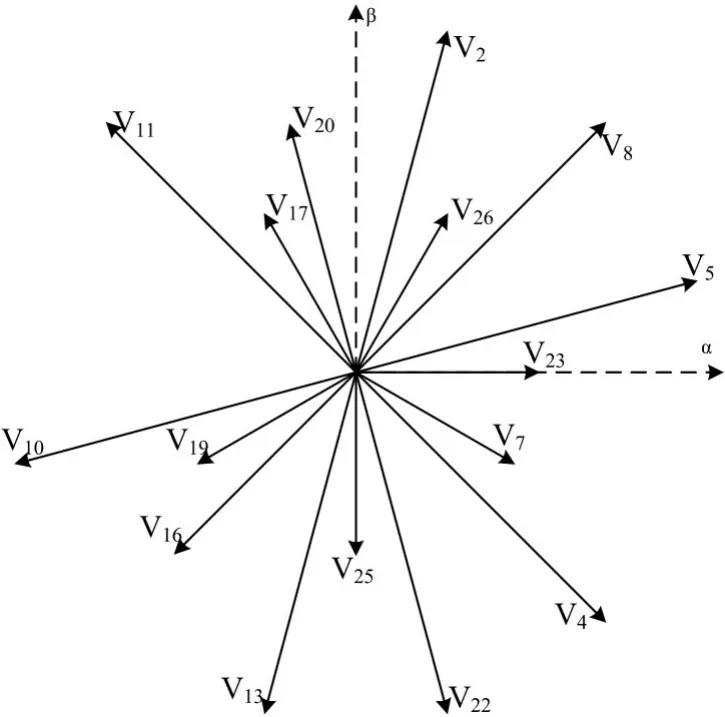
图6 单管短路后电压空间矢量图
3 SVPWM算法
空间矢量脉宽调制(SVPWM)算法模块主要分为四个部分,即扇区判断、基础作用时间的计算、不对称六相时间的计算以及波形调制[7],如图7所示。
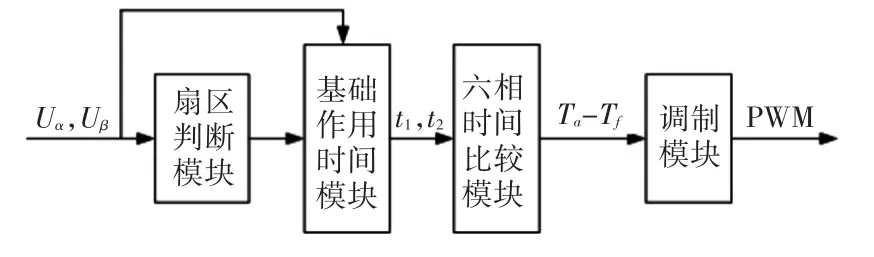
图7 PWM模块流程图
3.1 电压矢量的选择
九开关变换器正常工作时有27种开关状态,应用矢量空间解耦方法,将27种开关状态矢量投影到三个相互正交的子平面:α-β子平面、z1-z2子平面、o1-o2子平面,机电能量转换发生在α-β子平面。当变换器发生单管短路后,重新选择基础空间电压矢量[9],如图8所示。
3.2 扇区判断
将α-β子平面划分为十二个扇区,在三相电机扇区判断的方法上,应用到六相电机中,经过简单的运算就可以得到Uref所在的扇区,减少了计算过程,提高了系统的响应速度。

图8 基础空间电压矢量图
因为只考虑α-β子平面,在这里选取的是最大电压矢量和次大电压矢量,可以最小程度减小z1-z2子平面的谐波电流[10]。
因此,要引入A—F,令
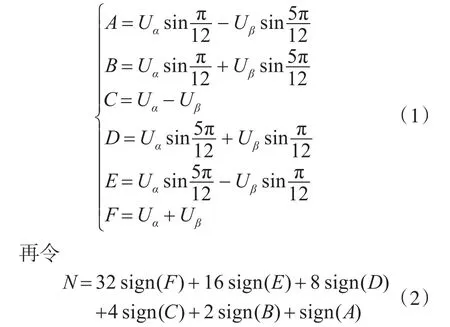
式中,sign(x)是符号函数,如果 x>0,则sign(x)=1;如果 x<0,则sign(x)=0。则 A—F以及扇区值与N值关系如表4所示。
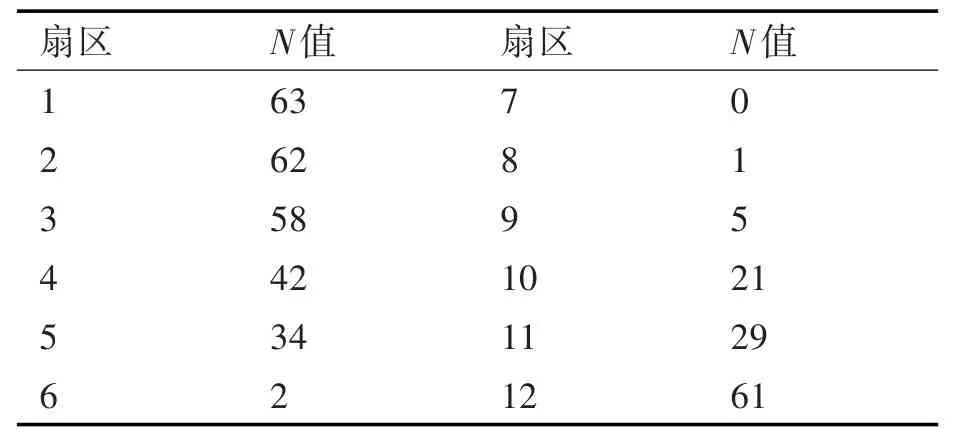
表3 扇区值与N值对应关系
3.3 基本电压矢量作用时间
将同一扇区内两个基础电压的作用时间分别定义为t1和t2,根据伏秒平衡原则得出相应的作用时间[11]。例如某扇区内基础电压为U9和U26,根据上述原则求得基础作用时间为

图9 矢量正交分解图
3.4 不对称六相时间Ta—Tf
得到基础空间电压矢量的作用时间t1和t2后,可以由六相时间比较模块得到不对称六相时间Ta—Tf。最后与三角载波进行比较,可以得到相应的PWM波形。
4 仿真分析
在Matlab/Simulink系统中进行仿真实验[12],九开关变换器发生单个开关管短路故障时,应用文中提到的空间矢量脉宽调制算法对电机进行控制,验证算法的可行性。
九开关变换器的开关频率为10kHz,直流母线电压Udc设定为300V,双Y移30°永磁同步电机的参 数 为 R=0.291Ω ,Ld=Lq=4.586mH ,ψf=0.0496Wb,np=2,J=0.052kg·m2,电机初始负载转矩为1N·m,1s后上升为5N·m。
仿真结果见图10。图10(a)~(d)分别给出了电机的磁链图、电机定子侧的六相电流图、转子转速图以及电磁转矩图。
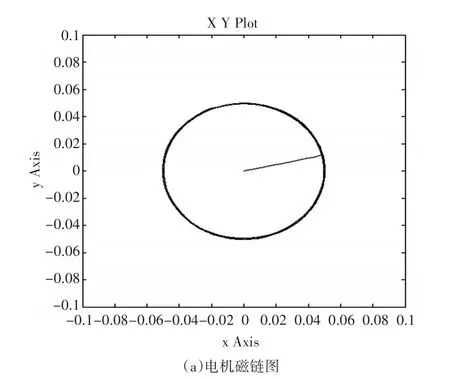
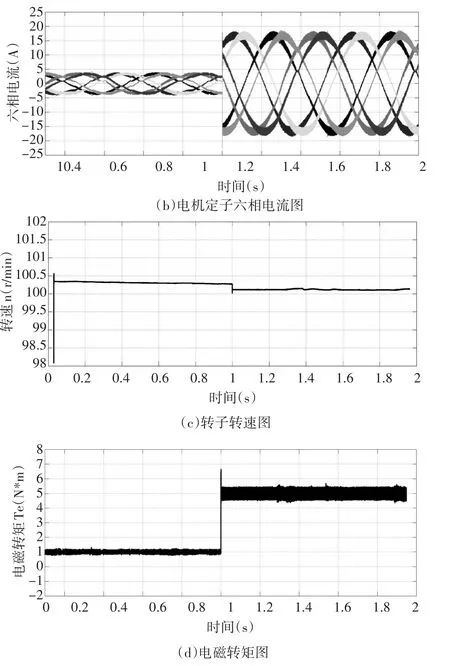
图10 仿真结果
图10 (a)显示了电机磁链图,依然是一个接近圆形的轨迹,表明谐波分量较小,有效地减少了转矩脉动;图10(b)显示了电机定子侧六相电流,电流波形为正弦波,谐波含量较小;图10(c)显示了电机转子以给定的转速保持平稳运转;图10(d)显示了电机的电磁转矩随负载转矩变化,保持电机的平稳可靠运行。图10中的波形结果证明了所提算法的可行性。
5 结语
本文对九开关变换器单个开关管的短路故障状态展开分析,应用相应的SVPWM算法,对双Y移30°永磁同步电机进行控制。根据仿真实验得到的波形图,当电机负载转矩发生变化时,电机依然按照指定转速运转,满足其平稳运行的要求,增强了系统的可靠性。
