主动声纳目标定位系统误差修正方法∗
2019-02-27赵向涛宛煜棋
赵向涛 宛煜棋 寇 祝
(1.海军大连舰艇学院水武与防化系 大连 116018)(2.海军大连舰艇学院学员五大队 大连 116018)
1 引言
主动探测水下目标,可以获得目标的舷角和距离信息[1~3],当水中目标速度较快时,声速相对较慢,主动声纳探测目标回波的延迟时间相对较长,如4.5km发现快速目标,回波的时间延迟约为6s。当对高速鱼雷目标进行仿真实验,发现目前定位方法对高速鱼雷定位误差达到百米以上,无法满足对高速鱼雷实施“精确打击”的目标[4~5]。故此,当采用主动声纳对于水下快速目标进行定位时,传统探测定位方法获得的目标方位距离的误差较大,需要进行修正。
2 简化修正方法
常用主动声纳属于收发合置声纳[6],探测目标过程如图1所示,t1时刻,舰艇与目标分别位于W1和T1点,舰艇声纳开始发射声波;t2时刻声波到达目标,舰艇与目标已分别运动到W2和T2点;t3时刻,当位于舰艇W3接收到目标的反射回波,目标运动到T3点。W1到T2的距离为d1,W3到T2的距离为d3。在W3点舰艇测得目标舷角qw,声纳声波传播距离为d1+d3,根据传播时间间隔测量的目标距离为(d1+d3)/2。显然,实际测得的目标距离和舷角值不匹配,必须进行修正[7]。
以舰艇和目标分别位于W2和T2点时刻为基准,对声纳的实测值进行修正。这样,目标距离就是W2和T2点间的距离d*,即

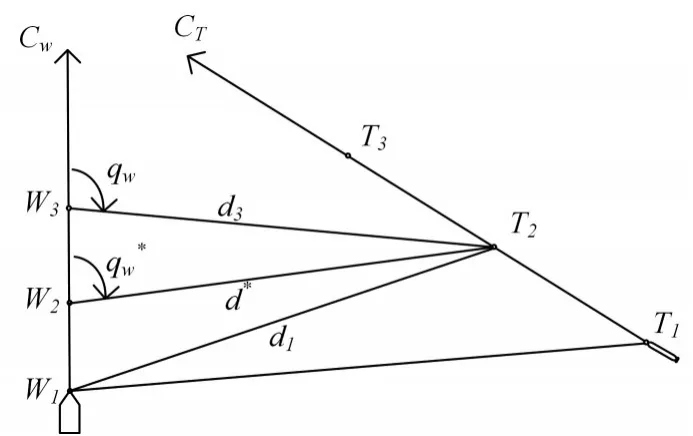
图1 收发合置主动声纳定位示意图

式中:Vw为舰艇速度;C为声波在海水中的传播速度。
3 椭圆修正方法
在相同的运动态势下,由于舰艇发射声波到接收的时间间隔Δt已知,则声波传播路程

声速C已知,所以d1+d3已知。
设舰艇位置点W1、W3距离为dw,则

由于舰艇航速Vw已知,所以dw已知。
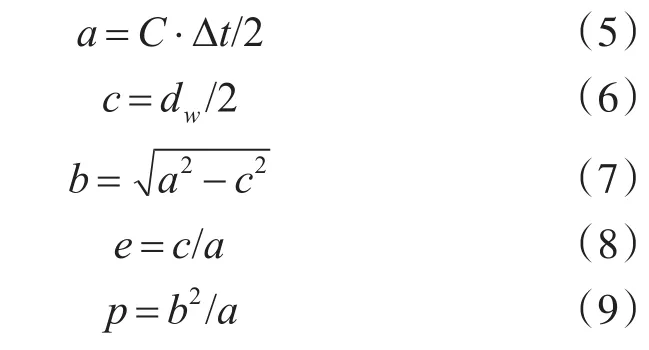
综上所述,目标T2到W1、W3距离和已知,则T2位于W1、W3为焦点的椭圆上。其中W1、W3为焦点,距离dw,则焦距为dw,即dw=2c;d1+d3为椭圆上的点到焦点的距离和,等于椭圆长轴2a,即 d1+d3=2a,则短轴2b可由公式求得。椭圆长轴2a、短轴2b、焦距2c、离心率e、焦点参数 p参数确定如下:
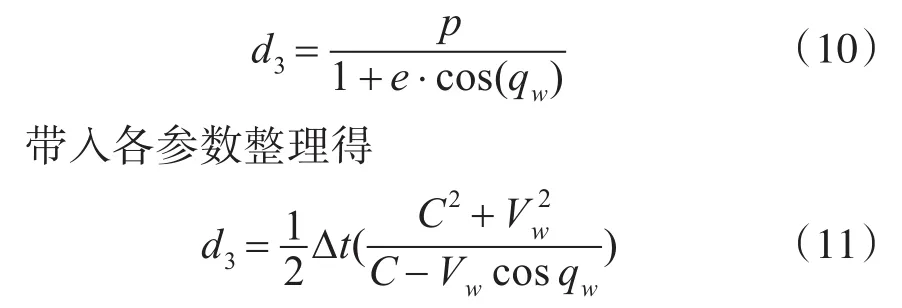
以舰艇为中心,舰艏方向为极轴,以舷角qw为极角,距离d3为极径的极坐标方程为
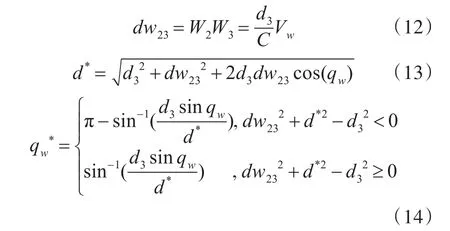
修正点W2到W3的距离dw23
由于修正参考点位于W2,所以t2时刻为基准时刻,接收到声波t3时刻已知,则t2到t3时刻时间延迟为
4 椭圆修正方法收发分置声纳应用
采用收发分置声纳主动探测目标,以舰壳发射阵和拖曳接收阵共同完成探测[8~9]。主要的优点是,拖曳接收阵远离舰艇,噪声低,探测目标距离远[10~12]。类似的收发分置声纳测量原理也存在原理误差。与收发合置声纳测量原理误差修正一样,收发分置声纳也需要进行误差修正。
收发分置探测过程如图2,t1时刻我舰位于W1点(发射阵声中心),拖曳接收阵位于S1点,与舰艇距离dst,目标位于T1点,发射声波。声波经过水中传播,t2时刻到达目标,此时我舰、拖曳阵和分别位于W2、S2、T2点。声波由目标反射,t3时刻返回接收阵,此时我舰、拖曳阵和位于W3、S3、T3点。
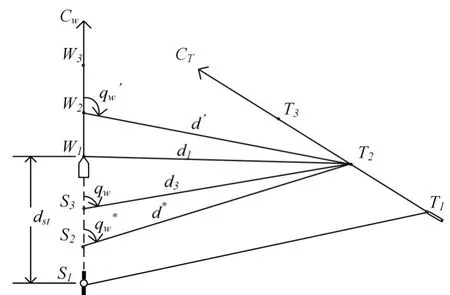
图2 收发分置主动声纳定位示意图
t3时刻接收阵位于S3点,测得声波传播时间间隔Δt,传播距离d1+d3=CΔt,接收目标舷角qw,W1、S3距 离 为 W1S3=dst-Δt⋅Vw。 由 于d1+d3=C×Δt为定值,所以,以W1、S3为焦点,T2点为椭圆上的一点。以S2点为探测基准点修正测量数据。
以我舰航舰艏方向为0度,以舷角qw为极角,距离d3为距离的极坐标方程为
由于修正参考点为S2,所以t2时刻为基准时刻,t1时刻从声波由W1点发出,到达T2点的时间间隔Δt1为声波经过d1传播时间

对于收发分置的主动声纳测量参数,即目标舷角和距离的修正,位置基准点发生了变化,时间发生了变化。所以应根据测量基准点、测量结果和测量时刻,进行相对位置的视差修正。
当以测量基准点S2进行修正后,相对于同一时刻我舰艇W2点,目标相对于舰艇的舷角qw'和距离d'为
5 仿真计算及结果分析
为突出问题的针对性,假设主动声呐能够准确测量回波方位和时间,并且不考虑其处理时间。设定声速为1500m/s,水面舰艇航向000°.0、航速5m/s,高速目标初始距离4.5km。分析高速目标分别位于方位000°.0、045°.0、090°.0,速度从10m/s~100m/s和航向从000°.0~365°.0时,各修正方法所得目标位置与实际目标位置距离差。根据修正算法,修正后可以准确得到t2时刻,即回波抵达目标时舰艇和目标的位置,但修正后基准时刻有所改变,实际中需要的是t3时刻舰艇和目标位置,在此次仿真中简单将修正后基准位置点平移至w3。其中,结果一为修正前目标位置和目标实际位置距离差,结果二为采用简易修正法后目标位置和目标实际位置距离差,结果三为采用椭圆修正法后目标位置和目标实际位置距离差,结果四为收发分置声呐采用椭圆修正法后目标位置和实际位置距离差。
当目标航向为330°.0不变,目标分别位于000°.0、045°.0、090°.0时,仿真结果如图3。
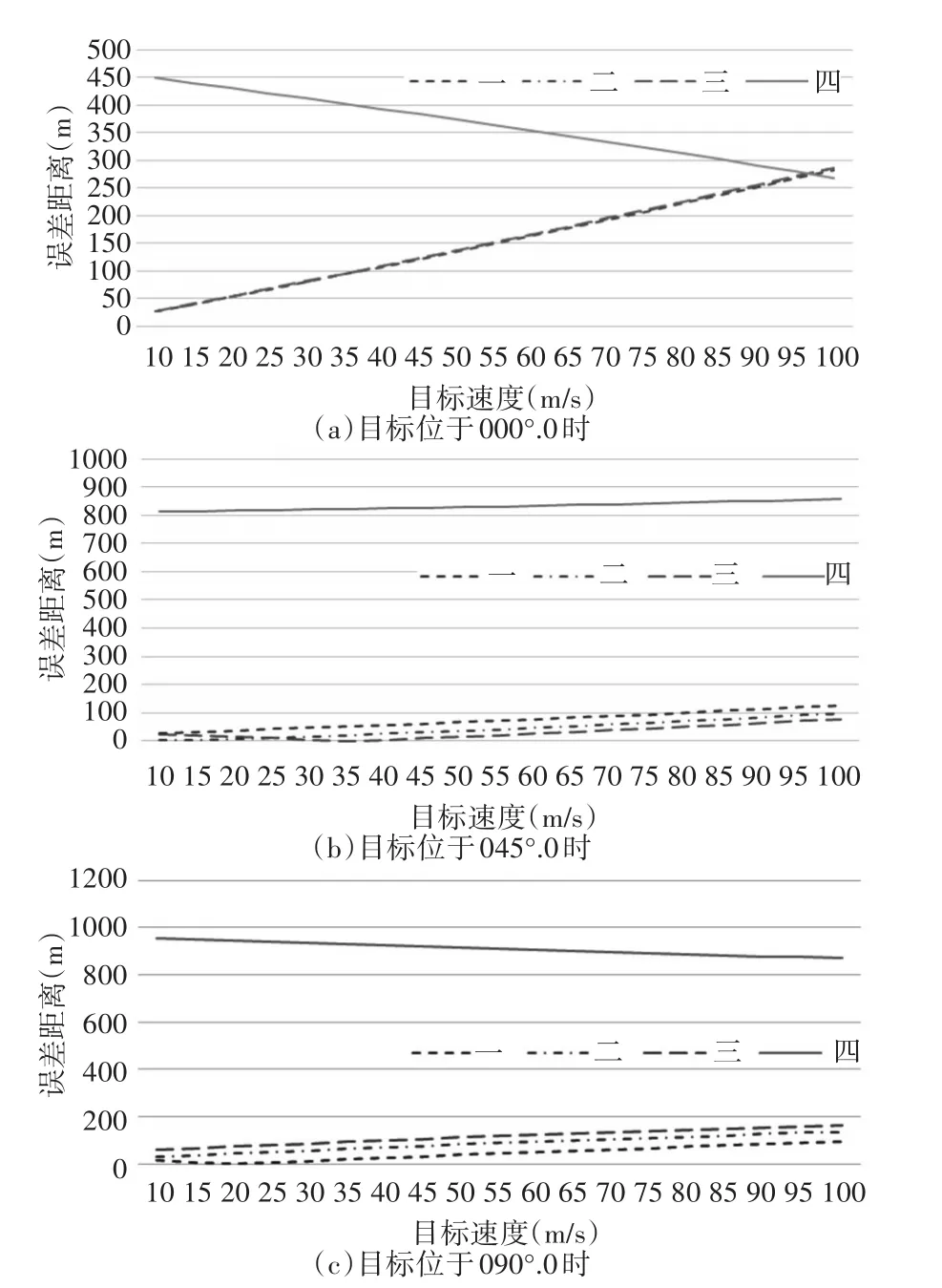
图3 误差与目标速度的关系
当目标速度为30m/s不变,目标分别位于000°.0、045°.0、090°.0时,仿真结果如图4。
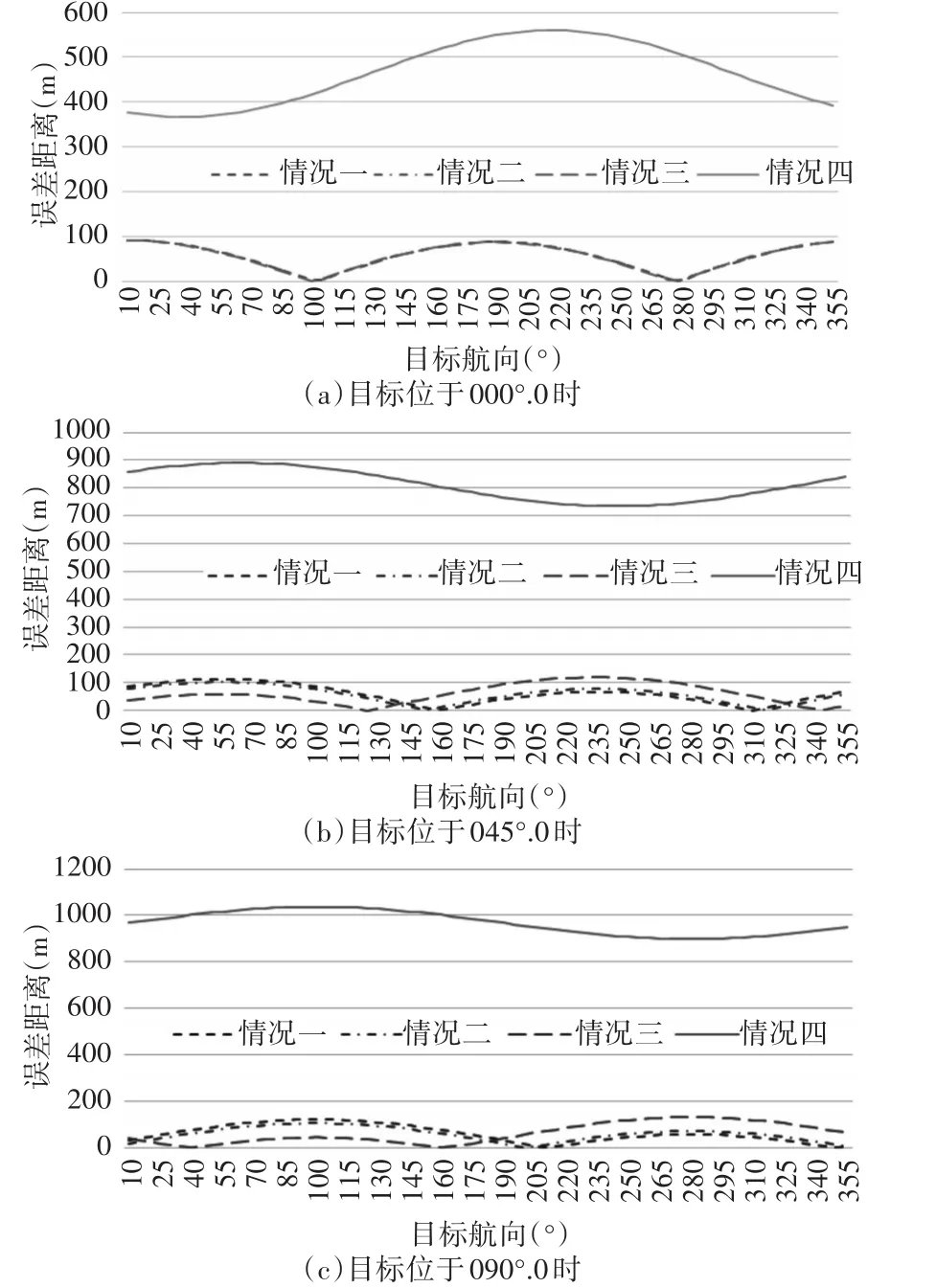
图4 误差与目标航向的关系
分析仿真结果可知,传统目标定位测量方法与目标实际位置确实存在误差,当目标速度为30m/s时,距离误差为45m左右并随着速度增大而增大,目标航向对距离误差也有影响,当目标航向与舰艇航向垂直时距离误差较小。同时,由仿真结果得,虽然修正方法可以准确得到舰艇和目标在t2时刻的位置,但简单将基准时刻平移至t3时刻无法消除误差,特别是收发分置系统距离误差最小达到300m以上,无法满足对鱼雷精准定位的需求,需要使用滤波等手段进一步消除误差。
6 结语
本文通过主动探测水下目标定位基本过程分析,指出传统的目标定位测量方法确定的目标距离、舷角信息存在系统误差的事实,在介绍了简化修正方法的同时,提出了收发合置、收发分置主动声纳定位误差修正方法并进行了理论推导,该方法可应用于水下高速目标探测定位应用中,对目标航向、航速等运动要素求解提供理论支持。
