一种回转式清污机自动化控制方式的设计应用
2019-02-26
一、概述
随着我国经济建设快速发展,为满足灌溉、调水、排涝、污水处理等需求,兴建了大量泵站工程,泵站直接从河道取水,水中大量的水生植物、生活垃圾、塑料编织物、树枝、死畜等漂浮物随水流流向泵站。这些飘浮物如不及时清理,一旦进入泵站,将造成泵站效率下降、电能大量损耗、设备运行条件恶化,严重时将造成水泵损坏、泵站失效。因此,站前漂浮物成为泵站安全运行一大隐患。近年来,有关单位在消化吸收国外清污机械先进技术的基础上,研制出适合我国国情的回转式清污设备,并投入到工程应用,一定程度上提高了漂浮物的打捞效率。
目前回转式清污机已广泛应用在大中泵站,据不完全统计,仅江苏就在50多个泵站作了运用,基本成为泵站标准配置的清污设备。经对部分泵站使用情况调查,回转式清污设备操作简单,清污效果好,特别是夏季水草爆发式增长期间,清污效果较为明显。
二、回转式清污机
回转式清污机,又称齿耙链回转式清污机或格栅回转链式清污机,如图1所示,是一种将拦污和清污相结合,能够连续运转的机械式垃圾清理设备,其结构组成为拦污部分的机架栅体、动力部分的传动机构和工作部分的回转牵引链及齿耙。
设备的工作方式:由拦污部分的机架栅体拦住水面上漂浮污物,动力部分中的电动机通过减速装置带动栅顶部中间轴旋转,再通过附着在中间轴上的牵引链轮带动工作部分的牵引链,牵引链在栅体前后作回转运动,固定牵引链的回转齿耙将被栅体所拦住的污物捞出水面至栅体顶部,当齿耙到达到顶部后翻转,污物在自身重力作用下落到栅体后部的皮带输送机上,最终通过皮带输送机将污物直接带送至站侧集污斗内或运输车内。
三、设备控制的现状
目前国内关于清污设备的自动化控制研究主要集中在抓斗类的清污机,如丁鑫伟通过对缅甸KUN电站清污机的结构特点的介绍,论述了清污机设备电气控制要求和清污机的运行方式,采取PLC多功能编程工具结合位置编码器给定的数据,实现清污机构的自动循环控制和自动定时控制。水利部杭州机械研究所研制了一套自动定位清污控制系统,具备手动、自动两用功能,并带有位置记忆和递进功能,并通过人机界面系统,使整个清污机电控系统具有智能化的优良性能。
但是在回转式清污机的操控方面,自动化程度并不高,设备运行启停往往需要人工在现场进行操控。虽然有部分工程配有水位传感器或者载荷限制器,对设备进行启停的自动控制,但是经过实际应用发现效果并不好。因拦污栅栅体本身为过水设备,当无污物堆积时,栅体前后水位落差并不明显;而要触发水位传感器动作,则污物堆积已堵塞于栅体之前,此时启动设备,瞬间过载负荷有时会大过设备承载,轻则引发保护进行动作,设备停机,重则保护来不及动作,设备发生损坏需要检修。载荷限制器也有类似问题,当耙齿上所传递过来的负荷大于设定值,设备触发停机信号,但是设备停机时河道内污物依然在聚集并最终堵塞栅体。此时排除污物堵塞,恢复设备运行的办法只能是人工进行预清除,打捞部分污物并分散堵塞的污物,整体工作量大且效率低。
四、根据污物自动控制清污机启停
若需要实现回转式清污机的自动化运行,必须增加一种检测设备,可以根据污物的情况进行设备的自动启停。
经过综合比较,采用一种光电控制系统作为设备的主控设备,其核心部件为一种超长探测距离的漫反射光电开关,通过把光强度的变化转换成电信号的变化,从而实现系统的控制。光电传感器通常由三部分构成,分别为:发送器、接收器和检测电路。
将光电开关装在直径300mm的不锈钢浮球内,浮体侧面开一视窗作为光电开关的照射窗口,底部有配重(可调整)保持浮球稳定。浮球在垂直于光电开关发射光的直径两侧有两个5mm宽的导向槽。在栅体的侧面设有上下支撑架,两撑架之间平行拉两根间距320mm,直径2.5mm的不锈钢钢丝作为浮球的导轨,使浮球能自由、顺畅地上下浮动,既能保证漫反射光电开关的照射方向始终对准栅体前方区域,又确保了浮体高度可随水位高低变化,始终保持漫反射光电开关的照射为水线之上。
关电开关的线缆通过浮球顶部引出,在上支撑架处设有恒力收缆设备,可通过平衡弹簧自动收放线缆,保证了浮体随水位上下浮动时线缆的正常松紧度,见图2。
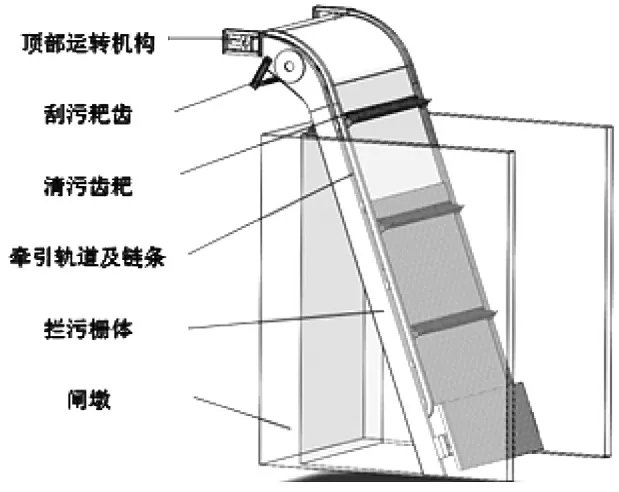
图1 回转式清污机图
线缆最终接入设置在控制柜的清污机集中控制仪,它是相对独立同时又有模拟量信号输出以便组网的智能型水位测控装置。该仪器采用了嵌入式微电脑控制技术,功能强大,性能稳定可靠,精度高,抗干扰能力强。仪表采用多功能16位CPU进行运算和控制,仪器硬件设有看门狗自复位电路,软硬件采用多种抗干扰措施,能可靠地工作在各种工业环境中。仪表可设置各种参数,具有闪存存储器,可存储各种预置参数,并能掉电永久保存。
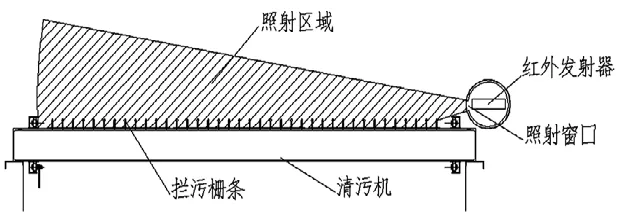
图2 漫反射光电开关工作示意图
设备的工作机理(图3):开关发射红外线光束,照射到目标(也就是栅前污物)时产生漫反射,当有足够的组合光返回接收器的光接收二极管时,接收器的驱动继电器开始动作,输出信号至清污机集中控制仪进行逻辑处理。清污机集中控制仪在接收到开关量信号后,先进行滤波处理,防止因干扰等造成的误动作。如:若信号有间隔断续,说明污物外形尺寸不大并随水波上下浮动,或者仅仅是雨滴反射的部分光信号。只有在一定时间内(可设定)始终有信号的出入,控制仪才开始输出下一步操作信号,进入控制回路启动清污机开机进行捞污。当污物捞取干净,水面没有聚集物后,关电接收器无信号输出,控制仪控制设备继续运行30s后(保证耙齿上的污物继续随设备运转被完全打捞上岸)自动停止运行,这样既能保证栅前污物被及时清除,也无需让清污机始终处于工作状态,节约了设备的能耗,同时缩短了设备的无效工作时间,相应延长了设备的总体使用寿命。

图3 漫反射光电开关工作原理图
另在清污机栅后设有超声波水位仪,实时检测栅后水位,一并送到“清污机集中控制仪”处理,对比根据上游水文站测定的水位数据(自动输入),当两个水位的差值大于一定数值(可设定),控制仪输出继电器信号,进入控制柜的回路,启动清污机。该项措施作为备用电气回路控制清污机的启停。
五、结语
回转式清污机的自动控制装置结构简单、控制方便,可极大提高清污机的工作效率。通过自动识别污物,自动启停清污机,减少了污物的集聚和栅条阻力,提高了回转式清污机的自动化水平,智能化的增加避免了清污设备空转发生,能耗减少,相应也延长了设备的使用寿命■