精密减速器使用寿命综合评价方法研究*
2019-02-26黄创绵董成举潘广泽刘文威黄强
黄创绵 董成举,2 潘广泽,2 刘文威,3 黄强,3
精密减速器使用寿命综合评价方法研究*
黄创绵1董成举1,2潘广泽1,2刘文威1,3黄强1,3
(1.工业和信息化部电子第五研究所 2.广东省工业机器人可靠性工程实验室 3.广东省智能机器人可靠性工程技术研究中心)
针对机器人用精密减速器使用寿命评价不准确且周期长等问题,提出一种基于层次分析法的精密减速器使用寿命综合评价方法。分析精密减速器可靠性预计数据、加速寿命试验数据和现场运行数据等多源信息,并基于多源信息权重,建立综合评价模型,给出评价流程图,为精密减速器使用寿命有效评价提供理论依据。
机器人;精密减速器;使用寿命;多源信息融合;综合评价
0 引言
随着我国制造业的转型升级及智能制造的深入发展,机器人作为智能制造装备行业最具代表性的装备,近年也随之蓬勃发展。我国工业机器人的市场规模约占全球的1/3以上,已连续6年成为全球最大的工业机器人市场[1]。精密减速器作为机器人的核心部件之一,约占整机成本的35%,包括行星摆线针轮减速器、谐波减速器和少齿差行星减速器等类型。行星摆线针轮减速器主要用于大惯量、高扭矩场合;谐波减速器主要用于传动精度高、承载能力强场合;少齿差行星减速器可实现零侧隙传动[2]。目前,国产机器人应用的精密减速器多为国外进口,国内机器人用精密减速器在整体综合性能上和国外同类产品还有一定差距。
使用寿命是机器人用精密减速器的重要性能参数,可靠性寿命是制约国内机器人用精密减速器发展的关键。对减速器进行使用寿命的综合评价,有助于制定机器人维修计划,保障机器人工作精度,提高机器人使用效率。目前,国内外学者对机器人减速器的可靠性寿命开展了相关研究[3-6],但对使用寿命评价方面的研究相对较少。目前减速器的使用寿命获取主要有3种途径:1)直接用设计寿命代替使用寿命,此方法存在较大误差;2)通过现场应用寿命来判断使用寿命,但现场应用寿命的获取需要较长的使用周期;3)开发寿命测试试验台,进行寿命测试[7-8]。
本文利用多方信息来源研究一种机器人用精密减速器使用寿命综合评价方法,实现对精密减速器的使用寿命预测。
1 评价信息来源
评价精密减速器使用寿命的信息数据来源于多个方面,包括精密减速器可靠性预计及仿真、加速寿命试验和现场运行数据等过程的寿命与故障信息。在可靠性预计过程中,利用精密减速器生产厂家提供的减速器几何模型、材料信息和采集的实际工况载荷情况,通过仿真分析或理论计算等方法,得到精密减速器初步的预计使用寿命分布。在加速寿命试验过程中,利用专用的精密减速器加速寿命试验台分别施加单组或多组温度、湿度、扭矩以及转速等加速应力开展试验,采集精密减速器测试过程动态退化性能参数,拟合分布函数,计算加速因子及可靠度函数,最终计算精密减速器的使用寿命分布。在精密减速器运行现场,定期采集精密减速器运行及退化信息,统计精密减速器的失效信息和故障机理,根据现场运行过程中出现的故障信息和寿命信息对精密减速器现场运行寿命分布进行拟合,计算精密减速器的使用寿命分布。
2 综合评价模型

2.1 指标权重判断矩阵构建


表1 评价指标重要程度的量化表


表2 判断矩阵表格
2.2 计算指标权重
2.2.1 权重计算


1)计算矩阵中同一行各元素的乘积;


2.2.2 一致性检验
在获得评价指标的权重后,需要进行一致性检验。当权重判断矩阵具有完全一致性时,有
完全一致性是指对于权重判断矩阵存在如下关系式:

权重判断矩阵一致性检验的步骤如下:
1)计算矩阵最大特征值


表3 1-9阶平均随机一致性指标
3)计算一致性比例
2.2.3 计算组合权重


2.2.4 综合评价模型
进一步可求融合精密减速器的可靠性预计、加速寿命试验和现场运行试验等多源信息的寿命分布为

精密减速器的使用寿命综合评价可由式(15)求得

精密减速器使用寿命综合评价流程如图1所示。
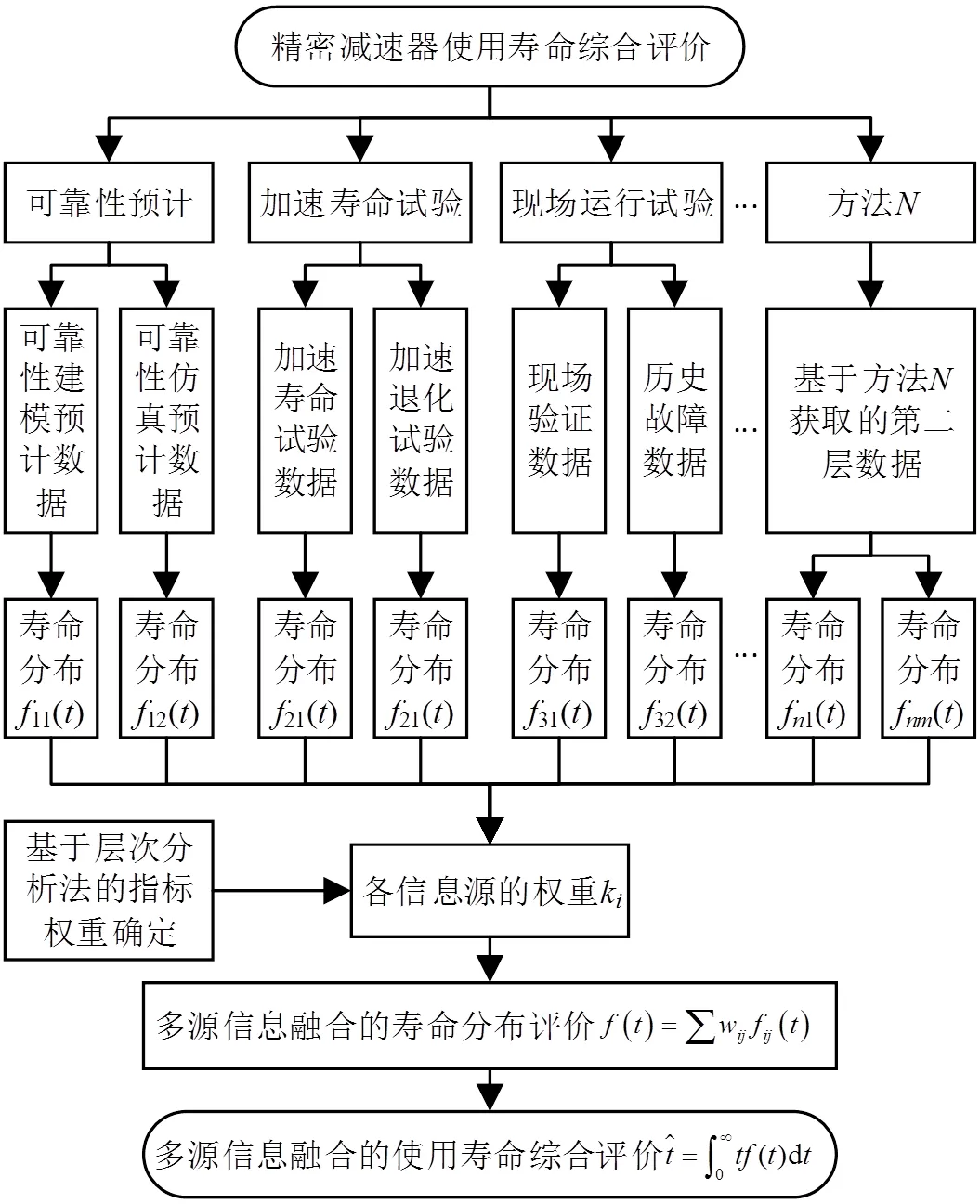
图1 精密减速器使用寿命综合评价流程图
3 综合评价案例分析
通过可靠性预计、加速寿命试验和现场运行试验得到减速器的寿命数据信息,利用层次分析法进行信息融合。首先通过对可靠性寿命信息进行预处理,获得不同试验条件下的寿命分布;然后根据所有寿命分布的重要程度确定权重因子,同时构造多源信息融合的综合使用寿命分布;最后利用分布函数得到精密减速器使用寿命的综合评价。
以下将进行基于多源信息融合的使用寿命综合评价方法的验证,数据不代表真实试验数据,仅为验证算法用。
3.1 数据预处理
3.1.1 可靠性建模预计数据信息
通过可靠性建模预计得到的数据信息,拟合使用寿命分布为
3.1.2 可靠性仿真预计数据信息
通过可靠性仿真预计得到数据信息,拟合使用寿命分布函为

3.1.3 加速寿命试验实验数据
通过加速寿命试验得到的数据信息,拟合使用寿命分布为
3.1.4 加速退化实验数据
通过加速退化试验得到的数据信息,拟合使用寿命分布为

3.1.5 现场验证试验数据
通过现场验证的数据信息,拟合使用寿命分布为
3.1.6 历史故障数据
通过历史故障的数据信息,拟合使用寿命分布为

3.2 权重确定
分别确定不同层次的寿命评价指标权重矩阵,判断矩阵表如表4~表7所示。
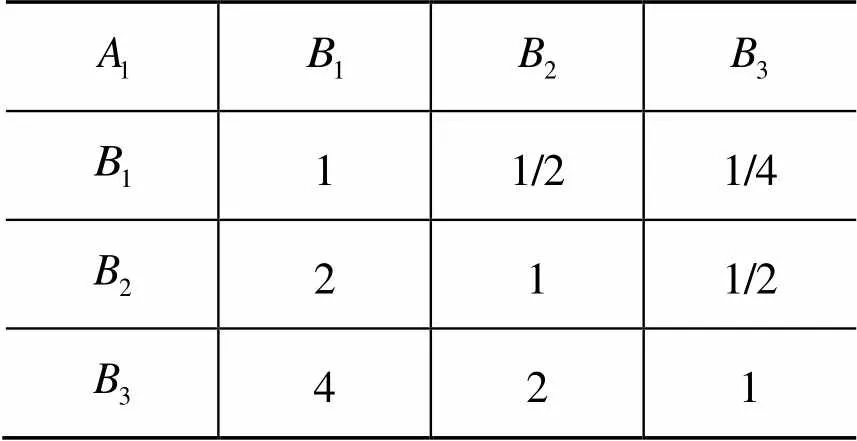
表4 第一层判断矩阵表
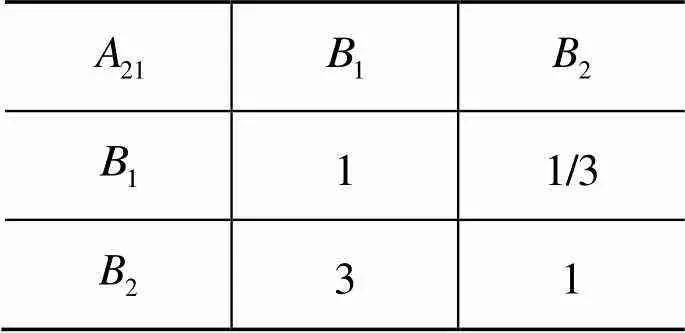
表5 可靠性预计判断矩阵表
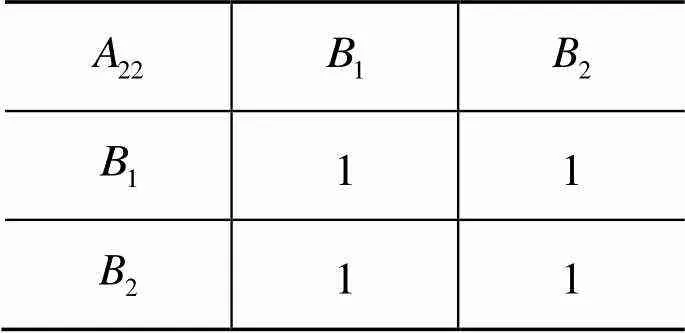
表6 加速寿命试验判断矩阵表
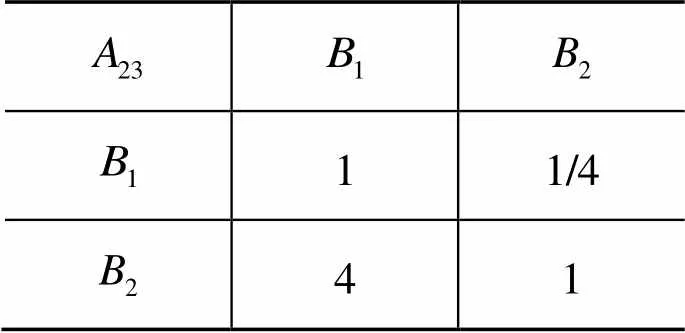
表7 现场运行试验判断矩阵表
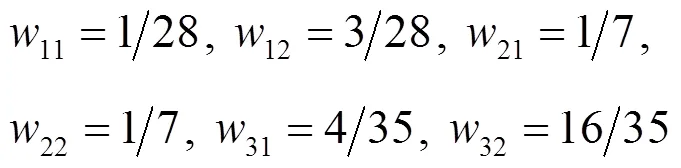
由式(4)~式(7)及式(13)可得各信息来源获取的寿命分布权重分别为
使用寿命的综合评价由式(15)可得
至此,通过综合评价方法得到精密减速器使用寿命为9142 h,基于多源信息融合的精密减速器综合评价方法得到验证。
4 结论
本文提出的基于多源信息融合的机器人用精密减速器使用寿命综合评价方法,解决了传统方法主要通过设计寿命或现场应用寿命进行使用寿命评价带来的局限和弊端,研究结论如下:
1)提出的机器人用精密减速器使用寿命综合评价方法融合了可靠性预计及仿真、加速寿命试验和现场运行试验等减速器全寿命周期多源信息,而非单一信息源评价,对使用寿命的评价更全面更准确;
2)在多信息源融合确定权重时,采用了定性与定量结合、客观与主观结合的层次分析法,对专家判断进行量化,在各指标之间进行分析,可按不同指标重要度确定权重值,为选择最佳指标提供了方法依据;
3)基于多源信息融合技术的精密减速器使用寿命综合评价方法,可推广至类似多源信息来源的设备使用寿命评价,可解决利用设计寿命进行评价不精确或利用现场应用寿命进行评价周期长等问题。
[1] 徐晓兰.中国机器人产业发展报告(2018年)[R].中国电子学会,2018.
[2] 宋永端.工业机器人系统及其先进控制方法[M].北京:科学出版社,2019.
[3] 官浩,王安宇,吴鸿涛.谐波减速器寿命分布可靠性模型[J].机械设计与研究,2016,32(6):46-48.
[4] 李俊阳,王家序,范凯杰,等.谐波减速器黏着磨损失效加速寿命模型研究[J].摩擦学学报,2016,36(3):297-303.
[5] 姚灿江.RV减速器可靠性研究与关键件疲劳可靠性分析[D].北京:北方工业大学,2017.
[6] 时浩.基于bayes理论的减速器小子样可靠性评估方法研究[D].沈阳:东北大学,2014.
[7] 全国齿轮标准化技术委员会.GB/T 35089-2018机器人用精密齿轮传动装置试验方法[S].北京:中国标准出版社,2018.
[8] 程曼,邱城,李金峰,等.机器人减速器疲劳寿命测试装置开发与研究[J].机械传动,2019,43(5):156-160.
Research on Comprehensive Evaluation Method of Service Life for Precision Reducer
Huang Chuangmian1Dong Chengju1,2Pan Guangze1,2Liu Wenwei1,3Huang Qiang1,3
(1.China Electronic Product Reliability and Environmental Testing Research Institute 2.Guangdong Industrial Robot Reliability Engineering Laboratory 3.Guangdong Intelligent Robot Reliability Engineering Research Center)
In order to solve the problems of the service life assessment of the precision reducer for robots, a comprehensive service life assessment method of the reducer based on analytic hierarchy process is proposed. To provide a theoretical basis for the effective life evaluation of precision reducer, a multiple information sources such as reliability prediction data, accelerated life test data and operation data of precision reducer are analyzes, and the weight of multi-source information based on analytic hierarchy process is determined, a comprehensive evaluation model is also established, and the evaluation flow chart is gave.
Robot; Precision Reducer; Service Life; Multi-Source Information Fusion; Comprehensive Assessment
黄创绵,男,1982年生,硕士,高工,主要研究方向:质量可靠性技术。
董成举,男,1991年生,硕士,助理工程师,主要研究方向:机器人测试与评价技术。
潘广泽,男,1989年生,硕士,工程师,主要研究方向:智能装备质量可靠性技术。
刘文威(通信作者),男,1987年生,博士,高工,主要研究方向:机器人及智能装备质量可靠性技术。E-mail:wenwei2009@163.com
黄强,男,1989年生,学士,助理工程师,主要研究方向:机器人测试与评价、可靠性技术。
广东省自然科学基金(2018A030310667);广东省省级科技计划项目应用型专项(2017B090914003);国家智能制造综合标准化与新模式应用项目“基于数字仿真的可靠性测试方法标准研究及试验验证”;国家重点研发计划项目(2017YFB1300900);广州市科技计划项目(201804010358)。
