多功能电动护理装置的设计
2019-02-23石春花秦浩天张玉平王宇潘峰
石春花,秦浩天,张玉平,王宇,潘峰
长治医学院 生物医学工程系,山西 长治 046000
引言
随着老龄化社会的提前到来和“空巢家庭”的日趋增多,越来越多的老年人“照顾缺位”[1-4];同时,我国已逐渐进入医疗改革和发展的第三阶段,社区医院不断兴起[2]。用何种方式来完成部分生活不能自理的老人或其他所需人群的家庭、社区护理任务,已经成为亟待解决的一个社会问题。由此引发了医疗护理领域的研究热潮,涌现出大量的优秀产品[5-7],但其中存在的问题也较多,仍然不能满足日常护理中的多样化需求。比如,高端智能产品以国外研发为主,且成品价格昂贵,操作繁琐,不适用于日常护理或自理;中低端产品鱼目混珠,大多以护理为噱头,存在不实用或功能鸡肋的窘境。基于此,我们本着造价低廉、功能实用、操作简单、可后续扩展的基本理念,设计了本款多功能护理装置,具有抓痒、输液、上药等功能,使其更家庭化、社区化,为解决基本护理提供一定的帮助。
1 系统方案
本系统主要由四个模块构成:控制模块、抓痒模块(或装置)、输液模块、上药及其他扩展模块,整体框架结构,见图1。其中,抓痒模块和输液模块为主功能区,背部上药模块为扩展功能区。

图1 系统的框架结构图
图1中,控制模块由STM32芯片构成,产生系统所需的8路PWM波,引入10个外部中断用于实现彩屏显示和按键切换等功能;抓痒模块包含四个舵机[8-10]和一个传输装置,舵机负责调整空间位置,实现全方位覆盖,传输装置主要由对心曲柄滑块结构组成,带动挠爪进行往复运动输液装置利用液位传感器控制气泵开关,实现液体流速的控制;背部上药结合了抓痒装置的定位以及气泵的流量控制。
2 系统硬件设计
2.1 抓痒装置硬件的设计
以手臂的结构和运动为原理[11-15],设计臂状抓痒装置,包含四个舵机和一个传动装置,以实现抓痒运动的空间全方位性,见图2。

图2 装置的结构组成与实物图
(1)爪子模块的选择和设计。爪子采用亚克力板,材料轻便,价格低廉,电机的额外功耗低,且与皮肤的匹配性适合。置于最前端,后接舵机。
(2)传动模块的选择和设计。传动模块核心为对心曲柄滑块结构,如图3所示。使用步进电机做动力,通过PWM波在一定范围内进行调节。与直线电机[16]或液压杆驱动相比,成本低且在速度和适用性上满足产品工艺化。
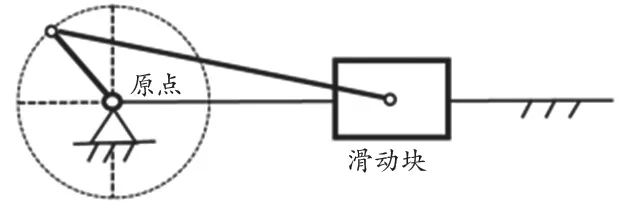
图3 对心曲柄滑块原理图
(3)关节和手臂的设计。关节由舵机构成,用于空间定位,与手臂构成了四自由度的调节[17-19],控制爪子到达指定部位实现抓痒操作,本装置选用的是15 kgm的大扭力舵机,可灵活调节手臂空间位置,基本可覆盖360°,满足日常护理中所需的全方位抓痒。
2.2 输液装置硬件设计
输液装置包含气泵和多个传感器,其原理构成,见图4。
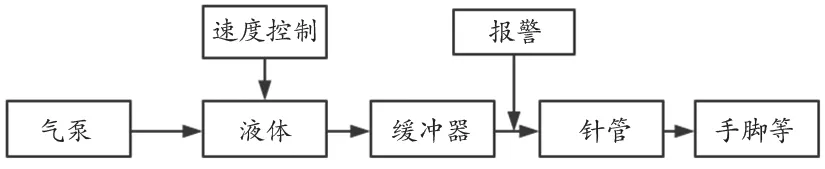
图4 液体容器槽构成图
外观设计为液体槽状,可置于任何水平面,替代了传统输液装置的高位悬挂式,节省空间,安置简便。输液槽从中间分开,左右各一个放置液体的容器,便于轮流使用、及时更换。液体容器槽实物图,见图5。
2.2.1 速度控制
自动换药和速度控制功能的实现依赖于对气泵的精确控制。通过按键,调节高电平持续时间达到对气泵出气量的调整,继而实现调节液体的流速。
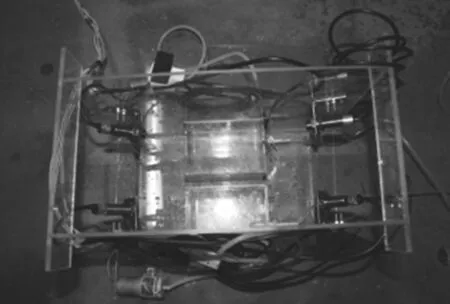
图5 液体容器槽实物俯视图
2.2.2 报警装置
采用外贴式液位传感器对液体进行实时监控,辅助进行报警。当药液处于完成的临界状态时,液位传感器工作灯熄灭,STM32引入外部中断,停止气泵工作,结束输液。同时,显示屏提醒药液需更换。
3 系统软件设计
3.1 抓痒与显示
抓痒装置在开始工作前可以处于任意收纳状态,打开电源后,根据此时装置的状态,依据所需抓痒部位的空间位置,通过按键进入中断,利用PWM波控制四个关节舵机进行0°~180°调节,当挠手到达指定位置后,启动步进电机,控制抓痒速度,并在TFT屏上显示此时的档位。
3.2 输液与显示
打开电源,设置两瓶药间隔时间,启动输液装置,第一瓶药液任务开始,当容器液面到达预设位置后,报警启动,并在TFT上显示“第一瓶药液输液任务结束”;与此同时,第二瓶液体的气泵启动,如上循环。具体流程,见图6。
4 系统评测
本护理装置主要涉及抓痒和输液两个主功能,适用范围较广,可用于日常的家庭、社区、医院护理。抓痒装置中超长的仿手臂可根据关节随意折叠,收纳不占用太大空间。工作时,可悬挂,可墙面固定,可挂肩等,工作环境几乎无限制。对于普通家庭护理,可以通过夹持装置固定于座椅扶手或床架上,见图7。输液槽的设计改变了传统输液方式,取代了传统的高位悬挂式,可置于任何水平面,安置便利,节省护理空间。可将输液器的线路贴附在仿手臂的抓痒机械装置上,也可自由挂置床架或支架等。本次系统的评测主要在实验室进行。
4.1 抓痒装置评测
将抓痒臂固定于座椅扶手(图7),启动电源,通过按键控制四个舵机,调整其到达相应的位置,此时为座椅人员的背部,启动步进电机。速度为最低档位(慢),选择相应按键,依次测试慢(按键1)、中等(按键2)、快(按键3)、较快(按键4)四个档位。评测表明,不同按键正确代表了不同的抓痒力度,随着电机速度的增加,抓痒的力度也随之提高。另外,不断调整舵机的方向可以使抓痒臂的活动范围涉及整个背部。

图6 系统程序流程图

图7 抓痒臂工作图(固定于座椅)
4.2 输液装置评测
输液装置工作流程,见图8。
(1)启动装置,气泵工作15 s,将输液管中的空气排尽,气泵速度分为慢(40滴/min)、中等(60滴/min)、较快(80滴/min)、快(100滴/min)四个档位。通过按键,分别测试了四档输液速度。测试表明,此装置可以通过不同按键的选择,实现所需的输液速度。

图8 输液工作流程
(2)安全性评测说明。为保障输液装置在临床使用上的安全性,设计液位传感器判断第一瓶药液剩余量,输液结束进行报警。在第二瓶液体容器气泵开始工作时,可自由设置时间间隔,保证两瓶药液在替换时有充足的安全时间,实现液体轻松替换。另外,输液管上的蓝色调节器用于紧急情况下的调节控制,防止空气进入人体。当输液速度智能控制出现故障时,利用传统的调节滴速的装置进行安全状况失控锁死。
5 讨论与结论
该护理装置在抓痒和输液的主功能区外,还设置了一个扩展功能区,包括智能上药、张贴膏药、热敷、按摩等,能借助现有的硬件和软件程序,在扩展口增加表征功能的简单硬件设备即可。这里以扩展功能“上药”做简单讨论。增加一条输液气路和药物容器,将输液器的线路贴附在仿手臂的抓痒机械装置上,调控挠手离开背部,在仿手臂的前端留出给药口,通过气泵的送气工作,将装在气管尾部的药物通过气路喷出并涂于患处。患处位置的找寻与抓痒位置的控制原理相同。
本文以护理产品中存在的问题为导向,设计了一款家庭化、社区化的多功能电动护理装置,具备抓痒和输液基本功能,以STM32为主控芯片,利用其强大的8路PWM波实现了对抓痒位置和速度的控制,也实现了对输液速度和换药的控制。分析表明,该装置具有造价低廉、功能实用、操作简便、后续扩展等特点,对推动医疗护理设备行业的前进有一定的参考意义。
