动态光源位置及照度控制系统的研制
2019-02-21冯文涛曹民李抒智
冯文涛 曹民 李抒智
摘要:为了加强对动态光源的控制,利用LabvIEw的比例一积分一微分(PII))控制方法,研制了动态光源的位置及照度控制系统。该系统通过控制电机改变光源的位置,采用LabVIEW的PID控制及参数自整定模块对输出电流进行控制,以改变动态光源的照度。研究表明,该系统可有效控制动态光源的位置及照度,在用于检测摄像机动态范围时,能有效提高检测效率及检测精度。
关键词:动态光源;PID控制;参数自整定;LabVIEW
中图分类号:TP311 文献标志码:A
引言
动态光源就是光度、色度等参数可以变化的光源。目前动态光源在治疗失眠、提高工作效率等方面发挥着一定的作用,为此本文研制了一个基于LabVIEW的动态光源位置及照度的控制系统。
本文使用LabVIEW进行编程,LabVIEW中的比例一积分一微分(PII))控制模块具有应用范围广、算法简单、鲁棒性好的优点,而且PID控制不依赖被控对象的精确数学模型,已成为目前工业控制中运用广泛的控制方法。因此本系统采用PID控制模块对动态光源的照度进行控制,这样不仅可以增加响应速度,而且可以减小系统稳态误差。为了实现对动态光源的位置控制,通过程序控制电机带动蜗杆蜗轮导轨转动来实现。由于研制的系统能对光源照度实现精确调节,所以还可应用于摄像机动态范围的检测中。
1系統组成
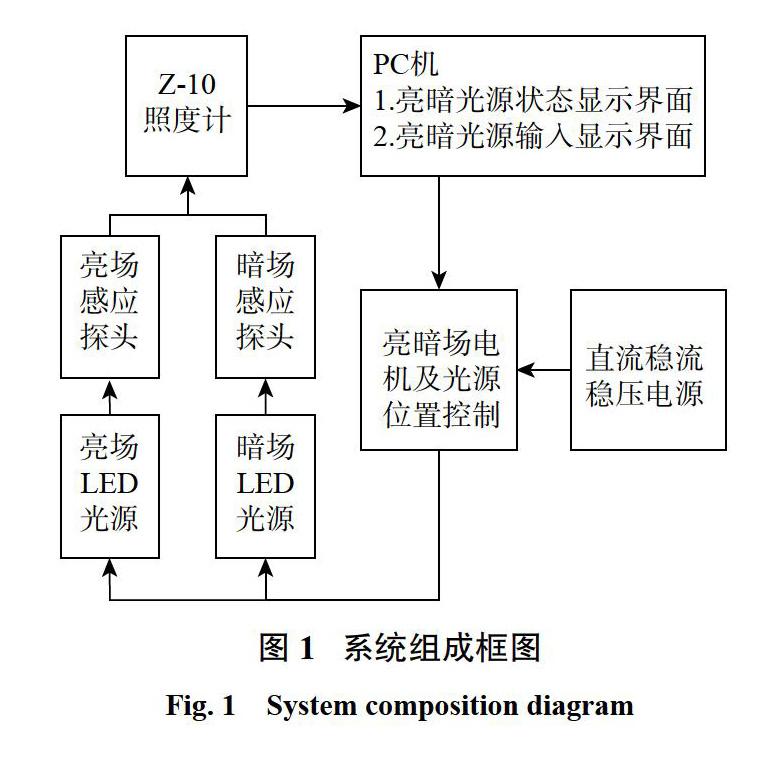
图1为动态光源位置及照度控制系统的主要组成部分,由PC机、运动控制卡、伺服电机、直流稳流电源、动态光源(LED灯)、照度计等组成。采用LabVIEW编写系统的控制软件,通过雷赛DMC2210运动控制卡以及雷赛ISS57-体简易伺服电机对光源的位置进行控制。动态光源选择LED光源,该光源是根据电流的大小来决定照度的大小,系统可以通过更改直流稳流电源的电流输出来改变LED光源的照度。
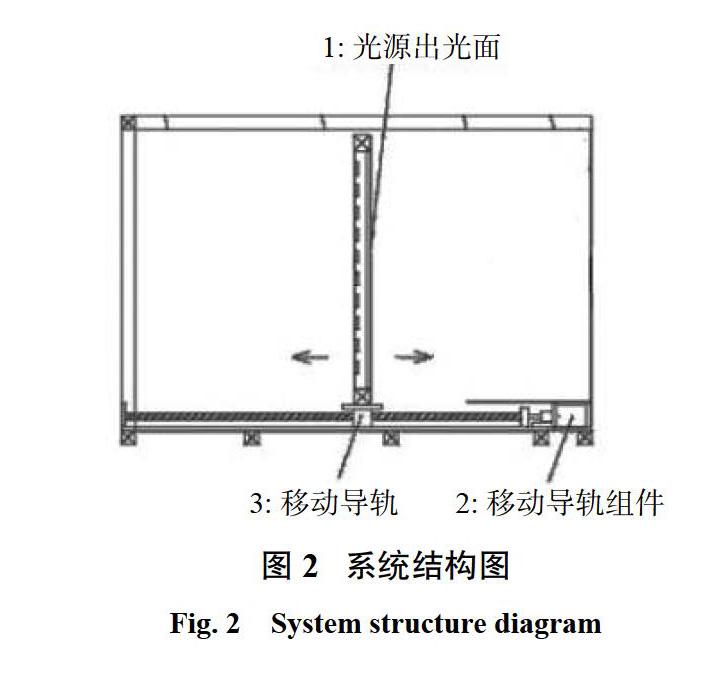
动态光源位置及照度系统结构图如图2所示。系统导轨组件在电机的控制下,带动固定在移动导轨上的光源沿导轨左右平移,从而实现光源位置的改变。
2控制程序设计
为了实现对动态光源位置和照度的控制,本系统使用LabVIEW进行编程。控制程序主要有三个:位置及照度监控、照度控制输出波形以及控制参数设置。
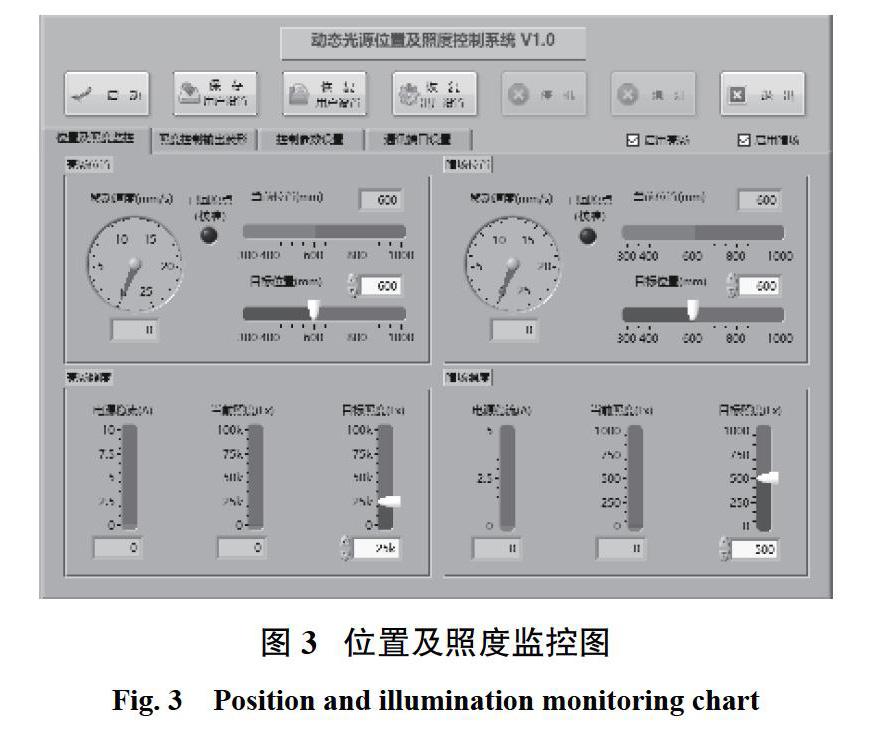
位置及照度监控图如图3所示,此面板主要是针对亮暗场光源位置以及照度进行实时控制。控制参数设置图如图4所示,此面板主要是针对系统的控制参数进行设置与显示,包括电机的行程参数、亮暗场的PID增益系数、电流稳流输出范围、电源地址码、采样时间等。
3算法设计
3.1基于LabVIEW的PID控制算法设计
PID控制器主要利用LabVIEW中的PID控制模块进行设计。PID控制增益系数包括比例增益(Ko)、积分时间(Ti)、微分时间(Td),首先调节比例增益,使系统能快速响应,之后分别调节积分时间与微分时间,使控制器对转速信号的控制达到理想状态。
PID控制器将设定点(Sp)与过程变量(pv)进行比较,以获得误差(e);比例控制可以减少控制器增益误差的时间;基于LabVIEW的PID控制中,通过梯形积分可以避免在pv或sp突然改变时积分作用的急剧变化;偏微分作用是,当sp突变时,只对pv施加导数作用,而不是误差e,以避免导数反冲。
在对PID控制器的设计中,通过对输入差值、比例、积分、微分的控制计算出适合本系统的PID控制器的实用模型,该模型可表示为
3.2基于LabVIEW的PID参数整定方法
在动态光源的位置及照度控制系统中增加PID参数自整定模块,并通过PID增益预整定方法可以使系统的快速响应、稳态误差等特性得到增强。
基于LabVlEW的动态光源暗场的照度PID自整定设计方案如图5所示。
4测试分析
4.1暗场输出波形分析
为了验证动态光源位置及照度控制系统的正确性与有效性,将该控制系统应用于摄像机动态范围的检测中,并试制样机。在样机测试中,动态光源亮场和暗场分别置于两组互不干扰的测试区域,样机可以同时控制两个区域进行检测,分别求出动态范围的最大值和最小值。以动态光源暗场为例,其输出波形如图6所示。
由图6可以看出:在初始时间系统暗场的照度值为01X,将目标照度设定为500lx后,当前照度在1.5 s的时间内快速上升并达到目标照度,随后出现超调达到最高值,并在9 s后趋于稳定,达到目标照度。电流波形与当前照度波形趋势相同。暗场照度与电流波形符合PID控制原理,实验结果与预期相符。
4.2动态光源系统应用于摄像机动态范围检测
摄像机的“动态范围”是指摄像机对拍摄场景中景物光照反射的适应能力,及摄像机对图像的最“暗”和最“亮”的调整范围。目前,确定摄像机成像器“动态范围”的主要方法是,使用灰阶测试卡和动态光源来收集和观察图像,并测量动态范围级别。目前使用灰阶测试卡这种方法依然存在一些问题,例如各个光源参数设置采用手动模式,测试精度以及测试结果的一致性不足等。通过加入动态光源位置及照度的控制系统,可以有效改善目前摄像机动态范围检测的不足。
摄像机动态范围检测试制样机如图7所示。
通过加入动态光源的位置及照度控制系统使得试制样机在测试中性能得以改善,其优点如下:(1)两组LED光源之间完全独立,没有任何串扰,光源功耗小,其色度、亮度等光学参数一致性好;(2)通过亮场与暗场光源的同时控制,大大提高了摄像机动态范围检测的效率;(3)LED光源组件的光学参数设置及调整,以及被测设备之间的距离及位置调整,均采用计算机控制,使得整个测试设备操作方便,测量精度大大提高。
5结论
本文针对动态光源的控制,研制了一个可以同时控制光源位置与照度的系统。系统测试结果表明:光源照度经PID参数自整定控制器调节后,其输出波形基本符合PID控制理论;将该系统应用于摄像机动态范围的检测测试平台中,解决了目前摄像机动态范围检测中无法自动调节光源亮度以及检测效率不高的问题,通过亮场、暗场光源同时控制以及照度PID参数自整定调节的引入,有效提高了对摄像机动态范围的检测效率及精度。
