基于内插法的工业机器人关节空间轨迹规划
2019-02-20田国富郑博涛孙书会姜春旭
田国富,郑博涛,孙书会,姜春旭
(沈阳工业大学机械工程学院,辽宁 沈阳 110870)
0 前言
随着机器人技术的不断发展,越来越多的行业开始使用机器人代替人们进行作业,将人们从繁重的生产任务中解放出来。为了使工业机器人能够较为理想的完成人们预定的任务,需要机器人在运动中避开障碍物,此时就要对工业机器人的运动轨迹进行规划研究。机器人轨迹规划指根据机器人所要求的作业任务,事先对机器人操作臂在作业过程中的位移、速度和加速度进行人为设定。在关节空间中进行规划是将关节角度表示为时间的函数,并且对关节角度时间函数的一阶、二阶导数进行规划[1,2]。当机器人末端需要通过多个中间点组成的连续路径时,则需要使用高阶多项式的方法生成一条光滑的轨迹,但随着中间点的增多,对应的线性系统的维度也会增加,这样就大大的增加了计算难度[3],故本文提出了使用内插法来解决规划运动轨迹所存在的问题。
1 通过中间点的高阶多项式轨迹规划
高阶多项式适用于对运动轨迹要求比较严格的场合,通过插值函数将所有的中间路径点光滑的连接起来[4-7]。本文以某运动轨迹通过q0、q1、q2三个点,要求在t0、t1、t2时刻分别到达q0、q1、q2点,通过给出在初始点q0处时机器人关节的速度及加速度和终止点q2处机器人关节的速度及加速度,得到七个约束:
q(t1)=q1
七个约束使用六阶多项式生成机器人关节轨迹,为
q(t)=ao+a1t+a2t2+a3t3+a4t4+a5t5+a6t6
通过分析,q(t)是连续可微的,其速度与加速度曲线也是光滑连续的,但为了确定多项式的各个系数就要求解出一个七维的线性方程,当随着中间点数的增加,其多项式系数也会逐渐增多,这样会使求解过程更加繁琐。针对高阶多项式轨迹规划的缺点,提出了使用内插法来规划轨迹。
2 内插法轨迹规划

对于第一段轨迹,设起始点与终止的时间分别为t0、tf,其位置、速度、加速度的约束条件为
由六个约束条件可以确定该关节变量的五次多项式函数[8-10]为
q(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5
对该五次多项式函数求一阶、二阶导数,即可得到在路径上的关节角速度和角加速度为
3 仿真
3.1 高阶多项式轨迹规划
本文对通过q0、q1、q2、q3四个点的轨迹进行七阶多项式轨迹规划。设轨迹从关节角为20°的位置开始运动,经过3 s运动到50°的位置,5 s的时候运动到90°,在终止时间8 s时到达70°的位置,并且轨迹在q0、q3点的速度及加速度为零。使用matlab软件可分别得到工业机器人关节角度、关节角速度、关节角加速度分别如图1、图2、图3所示,表明高阶多项式轨迹规划可以满足设定的初始条件。
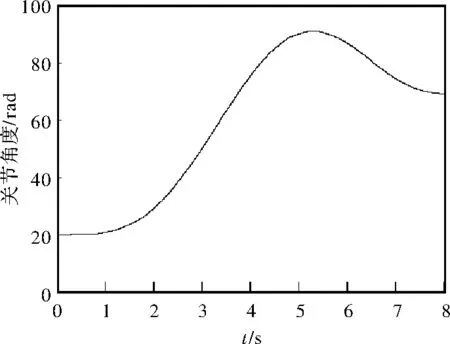
图1 关节角度变化曲轴

图2 关节角速度变化曲线
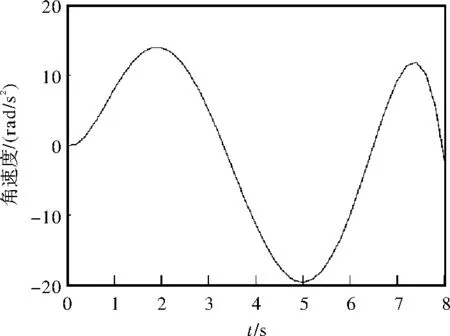
图3 关节角加速度变化曲线
3.2 内插法轨迹规划
同样使用内插法以与高阶多项式轨迹规划相同的条件,对通过q0、q1、q2、q3四个点的轨迹进行轨迹规划。设轨迹从关节角为20°的位置开始运动,经过3 s运动到50°的位置,5 s的时候运动到90°,在终止时间8 s时到达70°的位置,并且轨迹在q0、q3点的速度及加速度为零,对各个中间点的速度及加速度进行人为设置,为了计算简便,将混合时间点处的速度与加速度都设置为零,通过使用Matlab软件编程可分别得到三段五次曲线组成的关节角度、角速度、角加速度随着时间变化的曲线,如图4~图6所示。

图4 三个五次曲线段组成的关节角度变化曲线
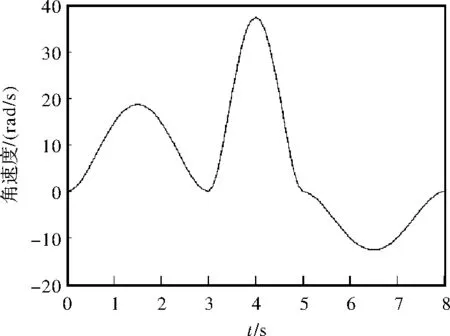
图5 三个五次曲线段组成的关节角速度变化曲线

图6 三个五次曲线段组成的关节角加速度变化曲线
4 结论
通过观察图4可以发现,内插法轨迹规划的关节角度变化完全满足初始约束,即轨迹从关节角为20°的位置开始运动,经过3 s运动到50°的位置,5 s的时候运动到90°,在终止时间8 s时到达70°的位置,速度变化与加速度变化也满足设定的初始约束,且关节角度与速度变化曲线都较为光滑连续,因此使用内插法来进行轨迹规划可以很好的替代高阶多项式的方法,大大降低了计算难度。