基于LM-BP神经网络的FlexRay总线系统的预测控制
2019-02-19刘志超张良玉杨梅王义
刘志超 张良玉 杨梅 王义
關键词: FlexRay; 车载网络; 神经网络; 自适应调节; 预测控制; 网络性能
中图分类号: TN915?34; TP183 文献标识码: A 文章编号: 1004?373X(2019)03?0082?05
Abstract: A FlexRay bus predictive control system based on Levenberg?Marquardt (LM) algorithm and neural network is proposed to improve the control performance of the FlexRay vehicle?mounted network with automobile high?speed data transmission bus, and ensure the control system working stability of the FlexRay bus network while data transmitting in large load. The working condition of FlexRay vehicle?mounted network at present moment is sampled to predict the working condition of FlexRay vehicle?mounted network at next moment. The method of online adaptive workload regulation is used to adapt to the time?varying load in vehicle?mounted network system, which can improve the reliability and robustness of the FlexRay vehicle?mounted network system. The simulation results show that the LM?BP neural network predictive control has strong adaptability and robustness, and can improve the security and stability of FlexRay vehicle?mounted network effectively.
Keywords: FlexRay; vehicle?mounted network; neural network; adaptive regulation; predictive control; network performance
0 引 言
FlexRay总线控制系统是由多个传感器、控制器、执行器以及各种电气设备构成的相当复杂的分布式控制系统,系统中繁杂的控制任务以分时复用的方式传输数据。但由于网络中数据流量变化的不规则性以及网络带宽的有限性,势必造成了消息传输的不确定性和消息的传输延时,这就使得FlexRay网络在高速传输消息时系统的控制性能下降,不能保证控制系统的可靠性和安全性。
由于FlexRay总线的发展时间不是很长,虽然国内外许多研究人员从不同方面对FlexRay总线车载网络控制系统进行一系列研究[1?4]也取得了一定的研究成果,但在网络控制系统高速传输数据时,系统的控制性能方面仍然存在问题。在现有的控制方法中,模型预测控制是一种基于数学模型的预测控制方法,当模型失配时就会导致控制输出的结果不能达到控制的要求;传统的BP神经网络在训练时容易出现陷入局部极小值,而且收敛速度慢;模糊控制自适应性能较差,控制精度不能满足系统的要求。
LM算法融合了梯度下降法和高斯?牛顿算法两者的优点,既有局部收敛性也有全局特性[5]。因此,将LM算法改进的BP神经网络作为FlexRay车载网络的预测模型,克服了传统BP神经网络收敛速度慢、易陷入局部极小值方面的缺陷。并将神经网络预测控制应用于FlexRay网络性能的跟踪控制,充分利用神经网络较强的非线性映射能力和预测控制滚动优化并进行反馈校正机理,更符合复杂控制系统的不确定性和时变的实际情况,在控制过程中利用网络训练算法对网络的权值和阈值进行在线滚动优化,以提高预测精度和系统稳定性。
1 FlexRay网络通信协议概述
FlexRay是一种基于时分多址和柔性时分多址的总线技术,其中每个节点之间的通信按照通信周期循环进行,其时间层次如图1所示。每个通信周期均分为静态段、动态段、符号窗口以及网络空闲时间四部分。大小固定的时隙组成了静态段,时长可变的动态时隙组成了动态段,每个动态时隙又包含了若干微时隙[6]。


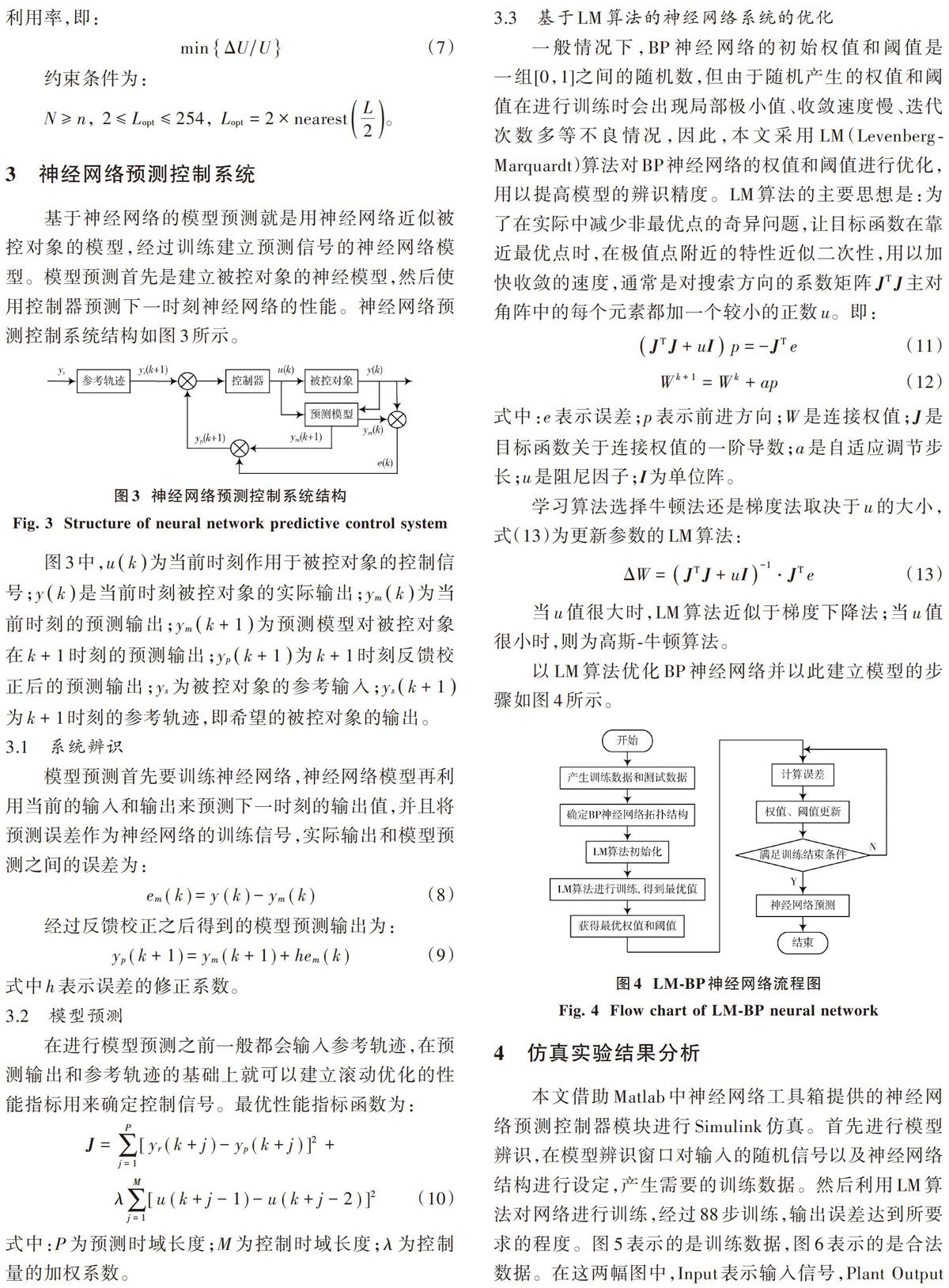
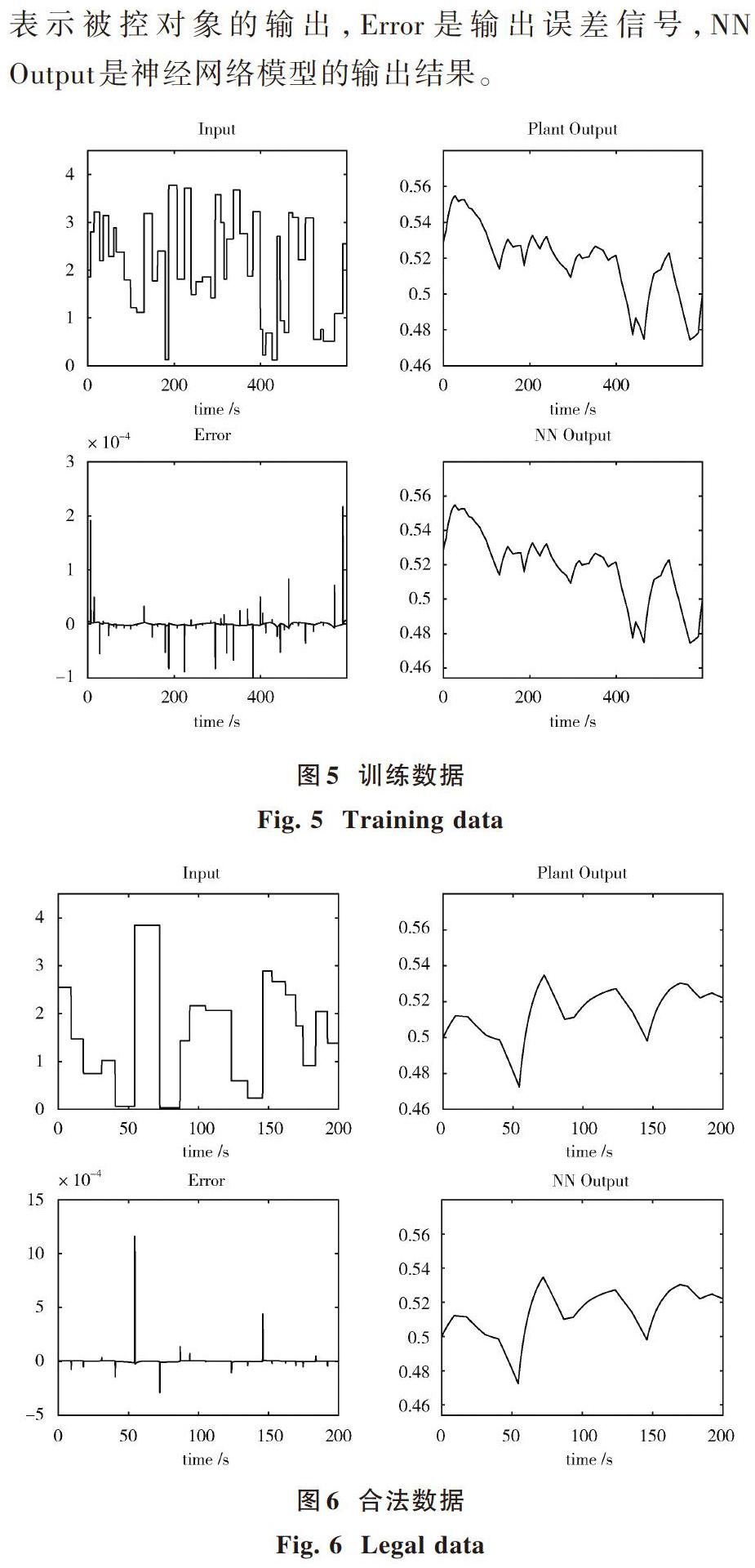
模型训练之后,通过建立基于神经网络的网络带宽利用率[J]的预测控制模型对汽车车载网络进行实时预测控制,设置相应的仿真参数进行仿真,得到的仿真结果如图7所示。图7显示的是系统的输出和参考信号,data2是参考信号,data1是该系统的输出结果。此次仿真中神经网络预测控制器的相关参数为:[P=7],[M=4],[ρ=0.03],[λ=0.5],优化算法用于确定控制输入。从图中可以看出,该预测控制系统能够对下一时刻车载网络系统的工作状态做出有效的预测控制,可以很好地实现对FlexRay车载网络的预测控制,提高了FlexRay网络控制系统的安全性与可靠性。

5 结 语
本文以FlexRay总线车载网络的网络资源利用率的数学模型为基础,将神经网络预测控制应用于任务工作量的跟踪控制。结合LM算法对车载网络控制系统的网络资源利用率进行预测,避免了传统BP神经网络易陷入局部最小化、收敛速度慢的缺陷,提高了神经网络的收敛速度。通过最后的仿真结果发现,神经网络预测控制能够对FlexRay车载网络系统的网络资源利用率做出有效预测,通过调节任务工作量来适应网络中动态变化的负载,确保车载网络系统中信息安全可靠地传输,能够提高FlexRay网络控制系统的可靠性和稳定性。
注:本文通讯作者为王义。
参考文献
[1] 赵睿,秦贵和,范铁虎.FlexRay通信协议的总线周期优化[J].计算机应用研究,2010,27(10):3847?3850.
ZHAO Rui, QIN Guihe, FAN Tiehu. Bus cycle optimization for FlexRay communication protocol [J]. Application research of computers, 2010, 27(10): 3847?3850.
[2] 项欣南.FlexRay总线静态段参数优化及其在线控制动系统中的应用[D].长沙:湖南大学,2016.
XIANG Xinnan. FlexRay bus static section parameters optimization and online control system [D]. Changsha: Hunan University, 2016.
[3] ZENG H, NATALE D I, GHOSAL M. Schedule optimization of time?triggered systems communicating over the FlexRay static segment [J]. IEEE transactions on industrial informatics, 2011, 7(1): 1?17.
[4] KANG M, PARK K, JEONG M. Frame packing for minimizing the bandwidth consumption of the FlexRay static segment [J]. IEEE transactions on industrial electronics, 2013, 60(9): 4001?4008.
[5] 张峤,邓贵仕.Levenberg?Maequardt神经网络在煤矿作业人员因可靠性评价中的应用研究[J].大连理工大学学报,2015,55(4):424?430.
ZHANG Qiao, DENG Guishi. Application of Levenberg?Maequardt neural networks in reliability evaluation of coal mine workers [J]. Journal of Dalian University of Technology, 2015, 55(4): 424?430.
[6] 王刚,丁天宝,荣健,等.FlexRay网络中带宽利用率的理论研究[J].计算机应用,2011,31(10):2634?2637.
WANG Gang, DING Tianbao, RONG Jian, et al. Study on bandwidth utilization rate in FlexRay networks [J]. Computer applications, 2011, 31(10): 2634?2637.
[7] 李斌,龙飞.一种FlexRay总线优化方法研究[J].计算机软件及应用,2015,32(5):142?143.
LI Bin, LONG Fei. A FlexRay bus optimization method [J]. Computer software and applications, 2015, 32(5): 142?143.
[8] 陈晓雷.神经网络自适应控制器仿真研究[D].太原:太原理工大学,2007.
CHEN Xiaolei. Neural network adaptive controller simulation [D]. Taiyuan: Taiyuan University of Technology, 2007.
[9] 王炳萱.LM优化算法和神经网络预测控制在非线性系统中的研究[D].太原:太原理工大学,2016.
WANG Bingxuan. Research on LM optimization algorithm and neural network predictive control in nonlinear systems [D]. Taiyuan: Taiyuan University of Technology, 2016.
[10] 謝嘉乐.基于改进的LM?BP神经网络的车牌识别算法研究与应用[D].广州:广东工业大学,2016.
XIE Jiale. Research and application of license plate recognition algorithm based on improved LM?BP neural network [D]. Guangzhou: Guangdong University of Technology, 2016.
[11] 程驰,帅志斌,李建秋,等.车载网络通讯协议FlexRay网络的分析及搭建[J].汽车安全与节能学报,2013,4(1):75?81.
CHENG Chi, SHUAI Zhibin, LI Jianqiu, et al. Analysis and construction of vehicle network communication protocol FlexRay network [J]. Journal of automotive safety and energy conservation, 2013, 4(1): 75?81.
[12] JANG K, PARK I, HAN J. Design framework for FlexRay network parameter optimization [J]. International journal of automotive technology, 2011, 12(4): 589?597.
[13] 张泽旭.神经网络控制与Matlab仿真[M].哈尔滨:哈尔滨工业大学出版社,2011.
ZHANG Zexu. Neural network control and Matlab simulation [M]. Harbin: Harbin Institute of Technology Press, 2011.
[14] 魏东.非线性系统神经网络参数预测及控制[M].北京:机械工业出版社,2007.
WEI Dong. Prediction and control of parameters of nonlinear system neural network [M]. Beijing: Machinery Industry Press, 2007.
[15] LIU G Y, XU B G. A real?time scheduling scheme of quantized control systems under bandwidth constraints [C]// Proceedings of the 8th World Congress on Intelligent Control and Automation. Jinan, China: IEEE, 2010: 2334?2338.