在VTS系统中实现雷达信息与AIS信息融合的方法探讨
2019-02-18陈鹏
摘 要:本文探讨了AIS设备在VTS系统中的应用,还分析了VTS系统、AIS与雷达的作用。提出实现雷达信息与AIS信息融合的必要性,并对信息融合的基本原理与方法步骤展开说明,有效解决了不同设备中同一信息的处理差异问题。文章最后说明在信息融合过程中存在的问题,为未来的研究指明的方向。
关键词:VTS系统;AIS;雷达;信息融合
AIS信息与VTS中雷达信息融合是在船上的多种传感器有效综合处理,得到可靠、高精度的导航数据,为船岸通信导航需求服务的背景下提出来的。在科技进步的推动下,船岸的通信设备日益增加,不仅给船舶的航行安全提供了保障,还提高了航运效率,在海洋环境保护方面也提供了有力的技术支持。但是,由于各类导航传感器之间提供的数据精度存在差异,且如AIS、雷达等提供的信息中存在关联和冗余,这就给数据处理与分析带来了一定的困难,并造成了资源浪费。本文就雷达信息与AIS信息融合的必要性和方法步骤等展开论述。
1 VTS系统与AIS作用分析
1.1 VTS系统的作用
VTS(Vessel Traffic Service)是一种由雷达、AIS、CCTV、无线通讯等子系统组成的对在港湾或进出港口的船舶实施监控、协调,并给这些船舶提供航行中所需的安全信息的交通管理系统[1]。国际海事组织(IMO)对VTS的定义是:由主管机关实施的,用于增进交通安全和提高交通效率以及保护环境的服务[2]。VTS系统具有四大功能:信息服务、助航服务、交通组织服务和联合服务。当前,在我国的沿海城市,VTS系统已经在船舶运输管理、海事部门行政执法和保护国家海洋权益等方面发挥重要作用。
1.2 雷达系统
在VTS中,雷达系统是重要组成部分。雷达系统是船舶实时动态数据搜集和交通监视的主要工具。雷達的主要任务包括[3]:目标检测与录取、目标跟踪、运动参数计算和危险局面判断等。VTS想要对整个区域的交通状况进行评估,就需要通过雷达系统获得雷达图像。通过雷达图像,可快速直观的判断航道船舶密度,运动情况,进而找到存在碰撞、搁浅等危险的区域,或者海事发生后可能造成危险发展的严重程度等,进而确定是否需要采取必要行动措施。
1.3 AIS系统
AIS(Automatic Identification System)是船舶自动识别系统,诞生于20世纪90年代。国际海事组织对AIS系统的描述为:AIS是一种船上改善避碰效果的方法;AIS是一种不用雷达即可使VTS获得交通状态的方法;AIS是一种制定船舶报告计划的方法。AIS 根据船舶的航行状态,以一定的时间间隔不断发送信息。这些信息主要包括静态信息和动态信息。静态信息包括IMO识别编码,海上移动业务识别码(MMSI),呼号及船名,船长,船宽,船舶类型,定位仪天线(主要是GPS)在船上的位置(离船舶距离和中心线左右距离)。动态信
息主要是船位及其精度标示和完好性状态,世界协调时UTC 时间,真航向,对地航速,艏向,航行状态,转向速率等[4]。
2 AIS在VTS中的应用
目前,大多数 VTS是以雷达为基础进行船舶数据的采集和跟踪,而VHF话音通信是船舶的交通服务的主要方式。将AIS技术引入VTS,对VTS的船舶数据采集与跟踪以及实施服。AIS的引入对VTS的影响包括三个方面[4]:自动船舶识别与提高船舶数据质量;扩展跟踪范围和改善跟踪性能以及改善和扩展服务功能。
3 信息融合的必要性[5]
按照SOLAS 1974要求,从事国际运输的现代化船舶至少应配备1台电子海图显示与信息系统ECDIS和2台雷达/ARPA。在雨、雾和各类船舶密集区域,船舶如果同时使用2台雷达,由于其天线的位置和目标船舶的相对关系以及无线电波的波长不同,在ECDIS上就会出现对同一船舶的2个回波显示,再加上AIS信息,显示器上就会出现3个不同的船位显示。这样很可能会造成驾驶员对情况误判,最终引起风险。
同一船舶的ARPA和AIS的数据来源和处理方式不同(对地运动和对水运动,历史数据和实时数据),所以通过雷达/ARPA和AIS获得的目标船的运动参数是不同的。
AIS 的船舶静态信息、航行相关信息以及与安全有关的短信息与雷达信息无关,而船舶动态信息与雷达信息有关。因此,AIS 信息与雷达信息的融合主要是AIS船舶动态信息与雷达信息的融合。
4 信息融合的基本原理
信息融合是充分利用多传感器系统的资源,通过对多传感器系统观测信息的合理支配和利用,把多传感器系统在空间或时间上的冗余或互补信息依据一定的准则进行融合,以获得被测对象的一致性解释和描述[6]。在信息融合技术中,多传感器系统是信息融合的硬件基础,多源信息是信息融合的处理对象,分析和综合处理是信息融合的核心[7]。
信息融合一般分为三级,从低到高依次为[8]:数据级融合、特征级融合和决策级融合,其中决策级融合是最高级的融合。信息融合的模式分为集中式融合和分布式融合[8]。
各传感器单独跟踪目标,利用自己的量测做出本地判决结论,将估计结果向数据融合中心报送,数据融合中心在更高层次上集中多方面数据做出进一步的相关合成处理[9]。集中式融合传送的数据全面,无信息丢失,最终判决结论置信度高;而分布式融合传送的数据量少,对传输网络的要求不严格,融合中心处理时间短,计算速度快、可靠性和延续性好,响应速度快。集中式融合传送数据量大,对处理器的要求高,可靠性较低,信息处理时间较长,影响系统响应能力;分布式融合的跟踪精度没有集中式高。
5 信息融合的方法与步骤
5.1 信息融合的方法
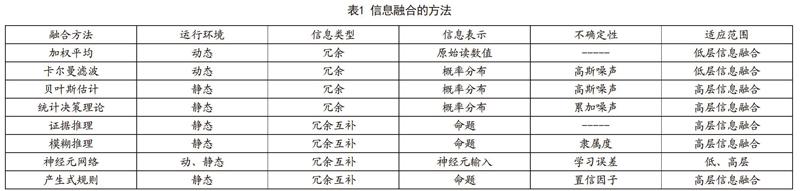
信息融合处理方法按技术方法和组合方式可分为多种[10-11],如表1所示。
5.2 AIS与VTS的雷达/ARPA信息融合的步骤
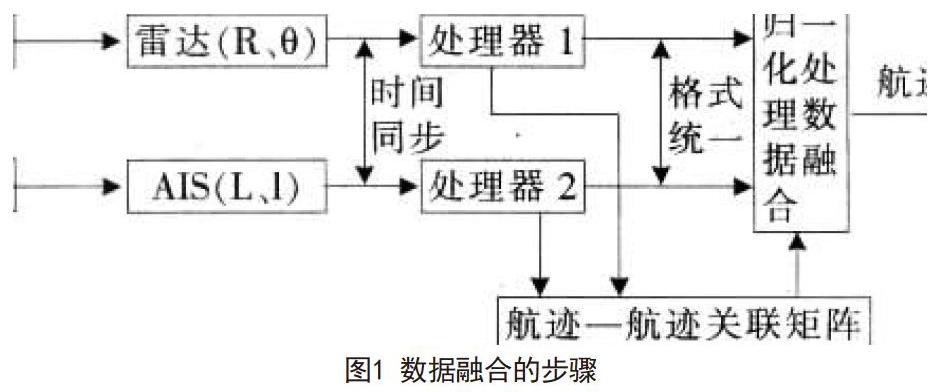
判别一个目标的存在,AIS的信息为即时运动参数,雷达型的ARPA的矢量图是通过历次雷达数据推算而得出,性质不一样。当AIS 船位信息与雷达回波相近时两者融合在一起,显示一个船舶信息;相差较大时则分别显示AIS 信息与雷达回波信息。对于后者,如何显示目标较真实的运行状态亦即信息融合的问题。图1是雷达和AIS各自获得的数据融合步骤的示意图。
1)雷达获得目标的距离R(m)和方位(°),AIS获得目标位置的经度L和纬度l。
2)将数据送入处理器之前,要确保两种设备所获得数据的时间同步。
3)将雷达探测到的目标航迹与AIS 所提供的目标航迹进行关联,找出属于同一个目标的AIS 目标航迹和雷达目标航迹。
4)数据融合之前,要进行数据的坐标变换,两者的数据采用同一格式。
5)把航迹关联的的目标数据以某种算法准则(正态型隶属度函数)进行归一化处理,实现两种信息的互补,提高数据融合的质量。
6 信息融合中存在的问题
进行信息融合处理的重要前提是两者信息的时间、空间统一,关键是信息的相关性判别,最终目标是形成中心级航迹。VTS 中环境复杂,目标数量大,实时性强,对目标信息融合,必须考虑各种算法的有效性、可靠性。同时,要考虑算法本身存在的系统误差,以及误差对航迹关联与航迹融合的影响。 融合的算法大体上分两大类:一是基于统计的方法,再就是基于模糊数学的方法,每一类又分很多种具体的算法。不少文献对这些算法作了深入的研究与探讨,同时也进行了仿真,但是在工程实现还有待于进一步的探索。必须考虑雷达和AIS 的信息的来源、种类以及环境对信息影响等特点,二者信息存在着冗余性和相关性,如何将信息进行有效的相关、融合,建立共同的中心级航迹,是亟待解决的问题。
7 结束语
本文介绍了VTS系统、雷达以及AIS系统各自的作用,就将VTS中雷达信息与AIS信息有效融合的必要性、基本原理与方法展开论述。利用现代科学技术将VTS系统中的雷达信息与AIS信息实现融合,有利于充分利用各自资源,改进海事管理工作,完善监督和服务。同时,本文所提及的方法步骤在实际应用中具有参考意义。
参考文献
[1]夏旻辰,梁建设.VTS在我国海事发展中的作用、存在的问题及思考[J].中国水运,2017,17(7):49-51.
[2]戚群,于涛.船舶交通管理系统(VTS)发展概况[J].中国无线电,2013,(04):36-38.
[3]黄健伟,陆悦铭,李义斌.AIS时代VTS面临的新课题[J].上海海事大学学报,2007,28(03):19-23.
[4]李春光,冯嵘,余啸野,等.自动识别系统(AIS)在交通管理系统(VTS)中的应用[J].天津航海,2017(01):44-46.
[5]刘传润,鲍君忠.AIS与VTS的雷达/ARPA信息融合的研究与实现[J].航海技术,2007(02):37-39.
[6]赵丽宁,赵德鹏,谷伟.AIS与现代航海技术的关系及对未来航海的影响[J].大连海事大学学报,2002(04):46-50.
[7]胡业勇.VTS中船舶识别与跟踪新方法的研究[D].大连:大连海事大学,2001.
[8]张杏谷,郑佳春.船载导航仪器信息融合的研究[J].仪器仪表学报,2005,26(3):306-308.
[9]贾海辞,孔凡村.船载自动识别系统(AIS)在船舶避碰系统中的应用研究[J].上海海运学院学报,2002(02):18-21.
[10]何友,王国宏,彭应宁,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[11]刘同时,夏祖勋.数据融合技术及应用[M].北京:国防工业出版社,1998.
作者簡介
陈鹏(1965-),汉,湖北省黄梅县,高级工程师,本科,研究方向:海洋测绘。