拒绝服务攻击下基于UKF的智能电网动态状态估计研究
2019-02-15李雪李雯婷杜大军孙庆费敏锐
李雪 李雯婷 杜大军 孙庆 费敏锐
近些年来,信息通讯技术(Information and communication technology,ICT)应用不断推动着传统的电力系统向智能电网(Smart grid,SG)[1-3]快速发展.智能电网是一种典型的物理信息融合系统(Cyber physical system,CPS)[4-5],它深度融合物理电网与信息网络,有效实现信息流与能量流的双向流动,通过信息化不断提高智能电网的自动化水平和运行效率.
在智能电网中,量测数据通常存在着不完备、数据异常等问题,必须进行状态估计(State estimation,SE)以准确和有效地监控传输线路负载或母线电压大小等状态信息,从而为基于系统实时状态数据进行安全评估等提供支撑[6-9].
智能电网状态估计分为静态状态估计和动态状态估计.静态状态估计算法目前较为成熟,以最小二乘法等为主,但其没有考虑系统的动态变化过程.实际智能电网量测量与状态量实时变化,动态状态估计比静态状态估计更符合电力系统的本质.电力系统动态状态估计算法主要以扩展卡尔曼滤波(Extend Kalman filter,EKF)方法为主[10],但EKF算法在计算雅可比矩阵时存在线性化误差.为解决该问题,Julier等[11]提出了无迹卡尔曼滤波(Unscented Kalman filter,UKF)方法,通过无迹变换(Unscented transform,UT)近似地获取非线性变换后的统计特性,与EKF算法相比,无需求解雅可比矩阵,UKF算法的精度与数值稳定性更好.为此,国内外学者已经开始研究基于UKF算法的电力系统状态估计.文献[12]针对电力系统测量噪声统计特性未知的问题,提出一种鲁棒广义极大似然的UKF算法进行状态估计.文献[13]提出一种考虑测量相关性的UKF算法进行电力系统状态估计.文献[14]提出了一种保证正定估计误差协方差的新UKF算法并用于状态估计.以上研究工作主要集中在电力系统中如何提高UKF算法的估计精度和稳定性,还未涉及网络安全引起的智能电网状态估计问题.
智能电网安全主要分为物理安全和网络安全两类.物理安全指的是智能电网在严重干扰下仍能保持正常运行的能力,而网络安全则是指支撑智能电网运行的通讯网络和计算机控制系统的安全[15-19].随着智能电网不断发展,其网络安全问题不断暴露并且日益受到重视.如2015年,乌克兰电网遭受网络攻击造成大面积停电故障,电网遭受包括拒绝服务(Denial of service,DoS)的多类型网络攻击[20].网络安全会严重影响通信性能,进一步影响物理电网和通信网络深度融合的智能电网安全.因此,在智能电网状态估计中必须考虑网络攻击问题.
DoS攻击是一种典型的网络攻击,攻击者在通信网络信道上持续发送伪造数据包,使得控制中心与远程终端的通信处于不可用状态,信息无法正常地接收和送达[21],这将导致数据包丢失(即数据丢包),从而影响智能电网状态估计性能.无迹卡尔曼滤波动态状态估计利用过去的状态估计值及动态模型对当前时刻的状态量进行预测,预测值通过网络参数和结线信息与系统量测值进行校正,得到可靠性更高的当前时刻的状态量和辨识系统模型,这是建立在数据有效的基础上.然而,DoS攻击引起量测量数据丢失,无法进行正常的预测校正,导致对智能电网的安全性和经济性进行错误的分析和判断,从而威胁智能电网安全经济运行.
从以上分析可知,现有基于UKF的智能电网动态状态估计主要集中在如何提高算法的估计精度和稳定性,当发生DoS攻击导致量测量数据丢失时,文献[22]采用伯努利分布描述其特性,但对量测量丢失数据未补偿研究相关的UKF方法.因此,解决由于网络攻击导致的智能电网量测信息丢失问题面临新的困难和挑战:1)DoS攻击导致的数据连续丢包破坏了量测数据的完整性,如何对丢失数据进行补偿并重构智能电网动态模型是一个挑战;2)传统基于完整性数据的UKF算法不能简单直接地应用于DoS攻击下的智能电网状态估计,如何设计基于UKF的动态状态估计新方法是另一个挑战.
为了解决以上困难和挑战,本文基于霍尔特指数平滑和无迹卡尔曼滤波技术,提出了一种适用拒绝服务攻击的改进无迹卡尔曼滤波新方法,主要贡献如下:1)从智能电网受到DoS攻击的角度研究UKF算法,运用伯努利分布描述了DoS攻击的量测数据丢失特性并设计了数据补偿策略,以重构智能电网动态模型;2)采用Holt's双参数指数平滑方法刻画电力系统状态方程,构造了融合补偿信息的新状态估计方程,并进一步基于估计误差协方差矩阵推导了状态增益更新方法,得到了无迹卡尔曼滤波动态状态估计新方法.
1 问题阐述
交流电力系统的动态空间模型由状态方程和量测方程表示:

其中,xk∈Rn×1为k时刻系统状态向量,zk∈Rm×1为k时刻量测向量,g(·)是一个n维的状态非线性函数向量,h(·)是一个m维的量测非线性函数向量,wk∈Rn×1是均值为零、方差为Qk的白噪声[23],vk∈Rm×1是均值为零、方差为Rk的测量噪声,并且wk和vk不相关.通常,在给定电力网络结构和参数时,状态量包括节点电压的幅值和相角,量测向量包括节点电压、节点注入功率和支路潮流等.
传统电力系统长期运行在封闭的物理环境中,在状态估计时不考虑通信网络安全带来的问题.然而,在智能电网中,通信网络与传统电力网深度融合,使得其从“封闭”走向“开放”极易导致恶意网络攻击,其中DoS攻击是最典型的网络攻击之一.当智能电网遭受DoS攻击,一方面会导致传感器测量数据包丢失甚至有时连续丢失;另一方面由于DoS能量有限会导致数据包丢失具有时变特性.这将不可避免地影响状态估计结果,进而危害系统安全运行.因此,为了降低数据包丢失影响,首先需要分析数据丢包特性并设计有效的数据补偿策略.
针对数据包丢失,首先可采用网络分析工具(如无线网络Airo Peek和以太网Ethereal等)捕获数据包,然后根据数据包的类型标识、序号和时间戳等标记分析数据包是否正常或丢失,再运用统计分析方法建立系统模型.目前针对数据包丢失的建模通常有两种,第一种是采用伯努利分布来描述[24];第二种是采用马尔科夫链来描述[25].本文考虑DoS攻击导致的数据包连续丢失随机特性,接下来采用第一种方法伯努利分布来进行刻画.
当攻击者发起最多d次连续DoS攻击时,将会导致数据包连续丢失,例如:如果k-d时刻的数据包成功传输,攻击者从下一时刻开始发起攻击,则连续攻击时间从k-d+1时刻至k时刻,在这段时间内最多有d个数据包丢失,在本文中运用伯努利分布刻画拒绝服务攻击引起的数据丢包特性.为了描述zk,zk-1,···,zk-d+1,zk-d传输情况,首先定义行矩阵λk∈R1×(d+1),其元素均服从伯努利分布特性,可表示如下:

其中,Pr(·) 表示概率,var(·) 表示方差,λk(i) 表示矩阵λk中的第i个元素,i∈[1,d+1],它代表着k-i+1时刻的量测量zk-i+1的传输状态,其值为0或1;如果λk(i)=0,则表明量测量zk-i+1丢失,而如果λk(i)=1,则表明量测量zk-i+1成功传输;ρ∈(0,1)表示数据包丢失概率.
在分析DoS攻击导致的数据丢包特性后,接下来对丢失数据进行补偿.在zk-1,···,zk-d+1,zk-d的传输状态由矩阵λk确定条件下,首先设k时刻的连续丢包数(即矩阵λk中从第一个元素开始的连续零元素数目)为φk,φk∈[0,d].为补偿丢失的量测量,定义新的行矩阵Mk∈R1×(d+1)来查找k时刻前最近一次接收到的数据包,并利用该数据包对丢失数据进行补偿.在矩阵Mk中,有且仅有第个元素的值为1,其他元素的值均为0,因此,当k时刻的量测量丢失时,可以通过矩阵Mk进行补偿.例如,在量测量传输状态矩阵λk=[0 1 0 1]情况下,量测量zk、zk-2丢失,而量测量zk-1、zk-3成功传输;由于矩阵λk中第一个元素的值为0,第二个元素的值为1,有φk=1,τk=2,因此,矩阵Mk=[0 1 0 0],即量测量zk由量测量zk-1进行补偿.在此注意:λk可视作一个滑窗,丢失的量测量zk-2在k时刻之前已经被量测量zk-3补偿了,因而在k时刻只需要探讨量测量zk的传输和补偿情况.
注1.当攻击者最多发起d次连续攻击时,则连续数据包丢失的数目受到d的限制,在λk中至少有一个1,并且在矩阵Mk中只有一个元素值等于1,即在状态估计过程中使用zk,zk-1,···,zk-d+1,zk-d中最近一次接收到的量测数据.
根据上述分析,拒绝服务攻击后k时刻的状态估计器实际接受的量测量数据可表示为
接下来,举例对式(3)进行说明.若攻击者最大连续攻击次数d=2,在k时刻,量测量传输情况包含以下三种可能情形:
1)λk(1)=1,即:φk=0,τk=1;
2)λk(1)=0,λk(2)=1,即:φk=1,τk=2;
3)λk(1)=0,λk(2)=0,λk(3)=1,即:φk=2,τk=3.
表1反映了以上三种情形下量测量传输情况,其中每列元素分别表示对应时刻的量测量状态.

表1 网络数据包传递表Table 1 Data packet transmission in network
从表1中可以看出,量测量z1,z2,z5,z7,z9和z10成功传输,而量测量z3,z4,z6和z8丢失,其中,z3和z4是连续丢包的.丢失的量测数据在最后一行中得到相应补偿.根据式(2)的概率分布和式(3)采取补偿策略后的量测量描述,可以构建新的量测方程:

在连续拒绝服务攻击下,考虑数据补偿后的量测方程(4),重建新的交流电力系统动态模型如下:

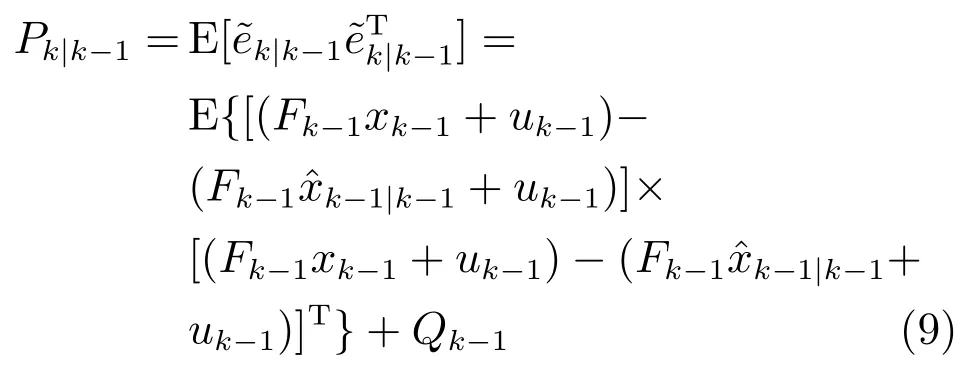
注2.根据式(3),新的量测量可由式(4)表示,且由此重构的新交流电力系统动态模型如式(5)所示,该模型考虑了电力网络遭受DoS网络攻击,与传统动态电力系统模型相比更具实际意义.针对新模型式(5),为了得到智能电网的最优状态,估计误差被定义为,则估计误差协方差矩阵应该最小,即

注3.根据ek|k的定义无法求解式(6),因为还未知.因此,在智能电网遭受DoS攻击时,根据非线性模型(5)和(6),结合能够针对非线性系统进行状态估计的传统无迹卡尔曼滤波算法,提出了一种适用拒绝服务攻击的改进无迹卡尔曼滤波动态状态估计方法.
2 拒绝服务攻击下基于UKF的动态状态估计
UKF以UT变换为基础[26],摒弃了对非线性函数进行线性化的传统做法,以非线性最优高斯滤波器为基本理论框架,使用UT变换近似系统状态的后验均值以及后验协方差.
1)UT采样
UT变换是根据随机变量先验统计信息(包括均值和方差),基于采样策略[27]设计一系列Sigma点;对设定的Sigma点计算其经过非线性方程的结果ηi;然后基于ηi计算随机变量的后验统计信息.本文的UKF采样策略选用比例对称采样,初始状态条件为n维状态变量x0和n×n维状态误差协方差矩阵P0,首先得到2n+1个Sigma点的位置和权值,即
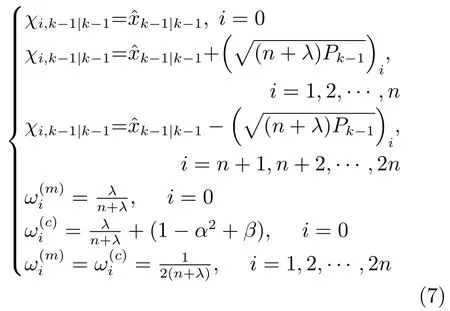
注4.采用2n+1个Sigma点的比例对称采样策略可以解决随着维数增加非局部效应增强的问题,而且兼顾了协方差的半正定性[29],该采样策略同时以三阶泰勒精度逼近状态的后验均值和后验协方差.
注5.在Sigma点采样中,计算量主要在平方根形式,一般通过Cholesky分解,其计算复杂度为O(n2).
2)Holt's双参数指数平滑法
式(5)状态方程中的g(xk)可用Holt's双参数指数平滑法近似替代:

其中,α、β为Holt's双参数指数平滑方法的平滑参数,取值范围为[0,1].
3)预测方程
接下来,预测Sigma采样点,将其进行Holt's双参数指数平滑变换,参考式(8),可得到每个点的状态一步预测值,即

根据k时刻的Sigma点集得到状态向量的预测值和预测误差协方差矩阵

其中,Qk-1为k-1时刻状态噪声的方差.
进一步,通过量测方程,由Sigma点计算出量测向量的预测Sigma点集

则,量测值zk|k-1的预测值为

注6.式(5)状态方程中的g(xk)可用Holt's双参数指数平滑法近似替代,该方法具有储存变量少、计算速度快的优点,为此将其引入到Sigma点集计算中,即式(10).其进一步经过加权处理就可得到状态向量的预测值和预测误差协方差矩阵如式(11)和式(12)所示.式(13)表示对所有状态向量预测Sigma点进行非线性量测函数运算得到量测向量预测Sigma点,经过加权处理即得到量测向量预测值,即式(14).
4)更新方程

根据式(15),可以推导出修正后的估计误差为
进一步,估计误差协方差矩阵为
为了获得最优的增益矩阵Kk,最小化估计误差协方差矩阵,即Pk|k对Kk的偏导数为0,即

化简式(18),可得到最优增益矩阵为
注7.根据最小均方误差估计准则,通过极小化式(17)的估计误差协方差矩阵Pk|k的迹求解Kk,并得到估计误差协方差矩阵的极小值.式(19)和式(20)为考虑融合补偿信息的最优增益矩阵和估计误差协方差矩阵,若直接求解关于h(xk-τk+1)的协方差矩阵及相关矩阵,由于h(·)具有非线性,状态后验信息不能通过非线性函数直接传递得到,因此对(19)和(20)难以直接求解,故接下来将对其进行UT变换近似求解.
为了进一步求解式(19),令:
根据对称采样策略Sigma点,UT变换系统状态后验协方差及互协方差计算方法[31],式(19)中Ck和Sk采用对相应的Sigma点集进行加权处理近似得到

根据式(21)和式(22),则无迹卡尔曼增益式(19)可改写为


注8.式(21)和式(22)表示采用UT变换近似求解量测量相关性矩阵及协方差矩阵,式(19)的无迹卡尔曼增益即为两个方差矩阵比较值,故而可化简如式(23)所示,也可对估计误差协方差矩阵进一步化简如式(24)所示.当智能电网受到拒绝服务攻击时,改进无迹卡尔曼滤波算法对丢失的量测数据进行补偿,先通过式(7)构造Sigma点集,接着根据式(8)进行参数辨识,再根据式(10)~(12)进行状态预测,最后根据式(15)、(23)、(24)进行状态更新,可以有效地减少量测数据丢失对系统状态估计的影响.
拒绝服务攻击下基于UKF的智能电网动态状态估计算法步骤如下,其中步骤2)~5)流程如图1所示:
1)初始化.设置初始系统状态量x0和初始估计误差协方差矩阵P0;
2)UT采样.根据k-1时刻的状态变量估计值和估计误差的协方差矩阵Pk-1|k-1,如式(7)所示构造Sigma点集;
3)Holt's双参数指数平滑法.式(5)状态方程中的g(xk)采用Holt's双参数指数平滑方法近似替代;
4)状态预测.根据构造的Sigma点集,并根据式(10)~(12)得到k时刻的状态变量预测值和预测误差协方差矩阵Pk|k-1;
5)状态更新.根据式(4)得到k时刻经过数据补偿的量测量,根据式(23)计算增益矩阵,并根据式(15)、(24)计算k时刻的状态变量估计值和估计误差协方差矩阵Pk|k;
6)判断迭代过程是否满足终止条件,如果当前时刻超过估计总时长,则动态状态估计流程结束,否则,重新回到第2)步,开始下一时刻智能电网状态的估计.
3 算例仿真
针对IEEE 30和118标准节点系统,在拒绝服务攻击下,对本文所提出的改进无迹卡尔曼滤波动态状态估计算法进行仿真验证,并采用如下指标对估计结果的误差进行评价:
1)估计误差


图1 拒绝服务攻击下基于改进UKF动态状态估计流程图Fig.1 Flowchat of new-UKF dynamic state estimation algorithm under DoS attacks
2)性能指标
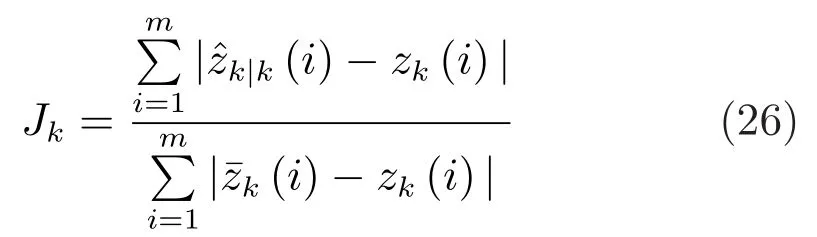
其中,εk表示k时刻的状态估计平均误差,n表示状态向量的维度,表示k时刻的状态估计值,xk表示k时刻的状态真值;Jk表示k时刻的状态估计性能指标,m表示量测向量的维度,表示k时刻状态估计值对应的量测估计值,表示k时刻补偿后的量测值,zk表示k时刻的量测真值.
3.1 IEEE 30算例
IEEE 30节点系统如图2所示,有127个量测量包括1个电压幅值、22个节点有功注入功率、22个节点无功注入功率、41个支路两端的有功潮流和41个支路两端的无功潮流,其中选择1号节点为平衡节点,其电压相角设为零,系统的状态真值和量测量真值由100次潮流计算得到,而实际量测值通过在量测量真值的基础上添加高斯白噪声获得,设定电压值为0.1%的偏差,功率为2%的偏差,且在分析的整个时间段内,设量测误差协方差矩阵R为常数.
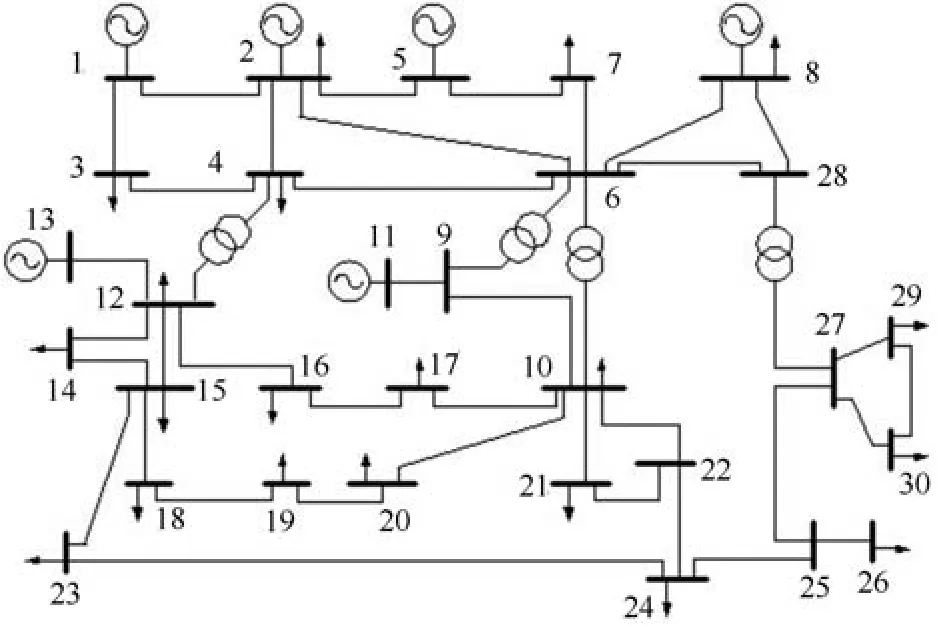
图2 IEEE 30节点系统结构图Fig.2 IEEE 30-bus system diagram
Holt's双参数指数平滑法从k=0,1两个时刻后的系统状态开始,参数α=0.8,β=0.5,即估计算法从时刻k=2开始.F0和P0的对角元素分别设为1.0和10-6,Q的对角元素设为10-6.
下面从4个方面对DoS攻击下基于所提出的改进无迹卡尔曼滤波算法进行智能电网动态状态估计的有效性分析:
1)智能电网遭受DoS攻击导致量测数据丢失对状态估计影响分析.假设受到DoS攻击,以量测数据丢失的概率ρ为0.05为例.相应的数据包丢失序列如图3所示,其中“0”表示数据包丢失,“1”表示数据包传输正常.
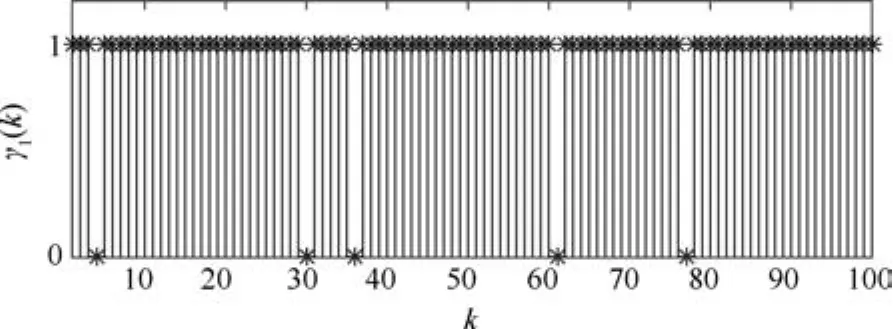
图3 IEEE 30节点系统丢包时序图(ρ=0.05)Fig.3 Data packet loss sequence of IEEE 30-bus system(ρ=0.05)
当遭受DoS攻击导致数据包丢失概率ρ=0.05时,针对IEEE 30节点系统,采用改进无迹卡尔曼滤波算法进行动态状态估计结果见图4和表格2.由于节点较多,在此仅以2号节点对应的电压相角和幅值为例进行分析,图4实线表示采用本文提出的改进UKF算法计算出的状态估计值,点划线表示系统状态真值,从仿真结果可以发现电压相角和幅值的估计值在真值附近波动,这表明所提算法能够有效进行系统的动态状态估计.表2列举了k=25,50,75,100时刻下系统的状态估计值(由于状态量较多,在此仅列出部分状态估计值),其中x2~x30代表电压相角,x32~x58代表电压幅值,可以发现随着迭代次数的增加,动态状态估计结果非常接近真值,这再次表明所提算法能够有效进行系统的动态状态估计.图5进一步展示了状态估计结果的估计误差和估计性能指标,可以看出估计误差低于3×10-3,并且性能指标小于1,这验证了在DoS攻击下本文所提的改进无迹卡尔曼滤波算法能够有效实现智能电网动态状态估计.

表2 IEEE 30节点系统动态状态估计结果Table 2 Dynamic state estimation results of IEEE 30-bus system
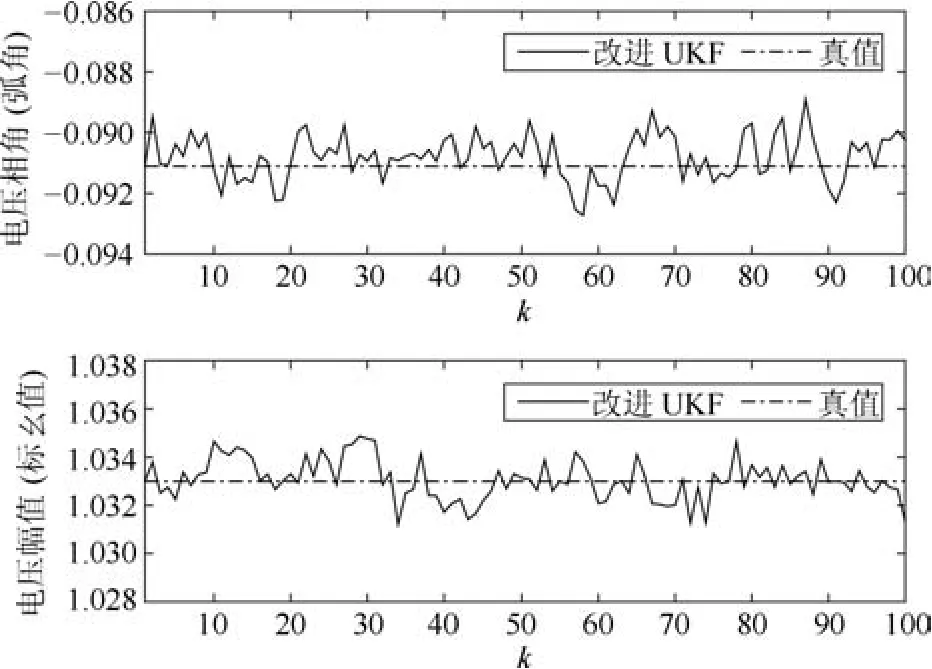
图4 DoS攻击下节点2的电压幅值和相角的估计值(ρ=0.05)Fig.4 Estimated voltage magnitude and phase angle at bus 2 under DoS attacks(ρ=0.05)
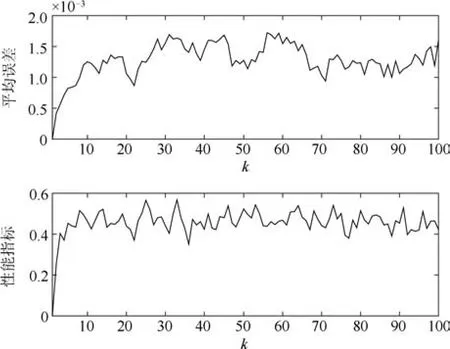
图5 DoS攻击下系统状态估计误差和性能指标(ρ=0.05)Fig.5 State estimation error and performance index of the system under DoS attacks(ρ=0.05)
2)不同程度拒绝服务攻击对动态状态估计影响分析.图6和图7首先展示遭受DoS攻击导致数据包丢失概率ρ=0.1情况下,本文提出的改进UKF算法的动态状态估计结果,图6中实线表示采用本文提出的改进UKF算法计算出的状态估计值,点划线表示系统状态真值,从仿真结果可以发现虽然丢包率不同,本文所提的改进UKF算法仍然能够有效实现智能电网动态状态估计.图8进一步展示了在4种不同数据包丢失概率(ρ=0.05,0.1,0.15,0.2)下,IEEE 30节点系统的状态估计结果,所有估计误差低于3×10-3并且性能指标小于1,这进一步表明本文所提改进UKF算法进行智能电网动态状态估计是可行且有效的.
3)本文提出的改进UKF算法与传统UKF算法进行动态状态估计性能比较.针对IEEE 30节点系统,以量测数据遭受DoS攻击导致数据包丢失概率ρ=0.05情况下为例,两种算法分别进行动态状态估计,结果如图9所示.从图9中可以明显地看到,传统的UKF算法状态估计的平均误差和性能指标明显大于本文提出的改进UKF算法的结果,从而表明传统的UKF算法的估计效果明显比本文提出的改进UKF算法性能差,这是因为量测值丢失导致传统UKF算法无法进行正确的系统预测与校正,进而导致状态估计性能变差.
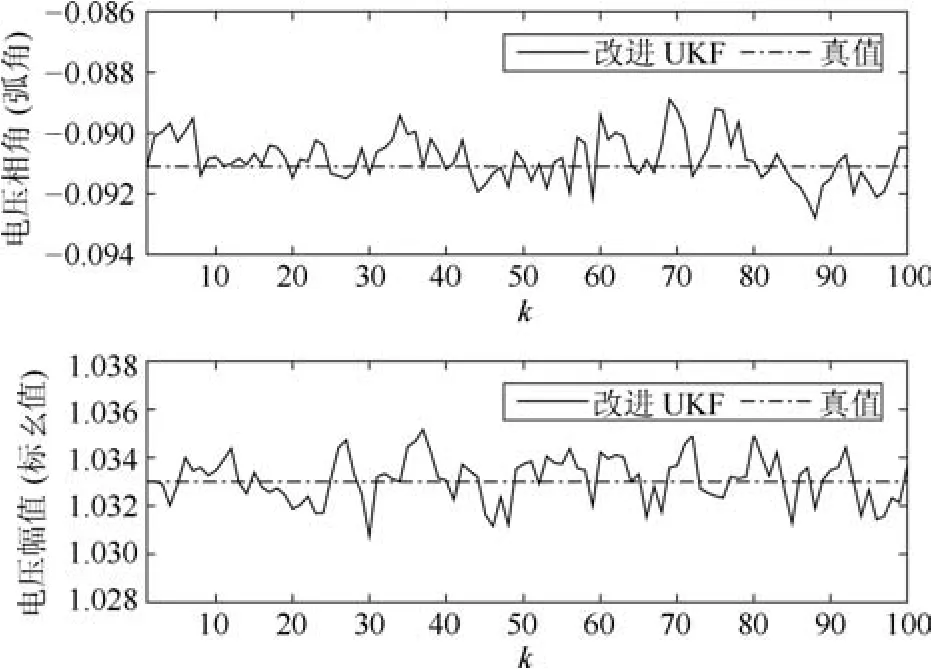
图6 在DoS攻击下节点2的电压幅值和相角估计值(ρ=0.1)Fig.6 Estimated voltage magnitude and phase angle at bus 2 under DoS attacks(ρ=0.1)
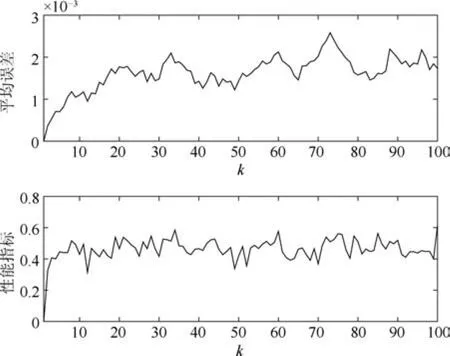
图7 DoS攻击下系统状态估计误差和性能指标(ρ=0.1)Fig.7 State estimation error and performance index of the system under DoS attacks(ρ=0.1)
4)本文提出的改进UKF算法与文献[22]算法进行动态状态估计性能比较.针对IEEE 30节点系统,在4种不同数据包丢失概率(ρ=0.05,0.1,0.15,0.2)下,本文提出的改进UKF算法和文献[22]算法分别进行动态状态估计,结果如图10所示.从图10可以看到,4种不同数据包丢失概率下本文提出的改进UKF算法的平均误差和性能指标均小于文献[22]所提算法,从而进一步表明本文提出的改进UKF算法具有较好的状态估计性能.

图8 DoS攻击导致4种不同数据丢包概率下IEEE 30节点系统的状态估计误差和性能指标Fig.8 State estimation error and performance index of IEEE 30-bus system with four different ρvalues
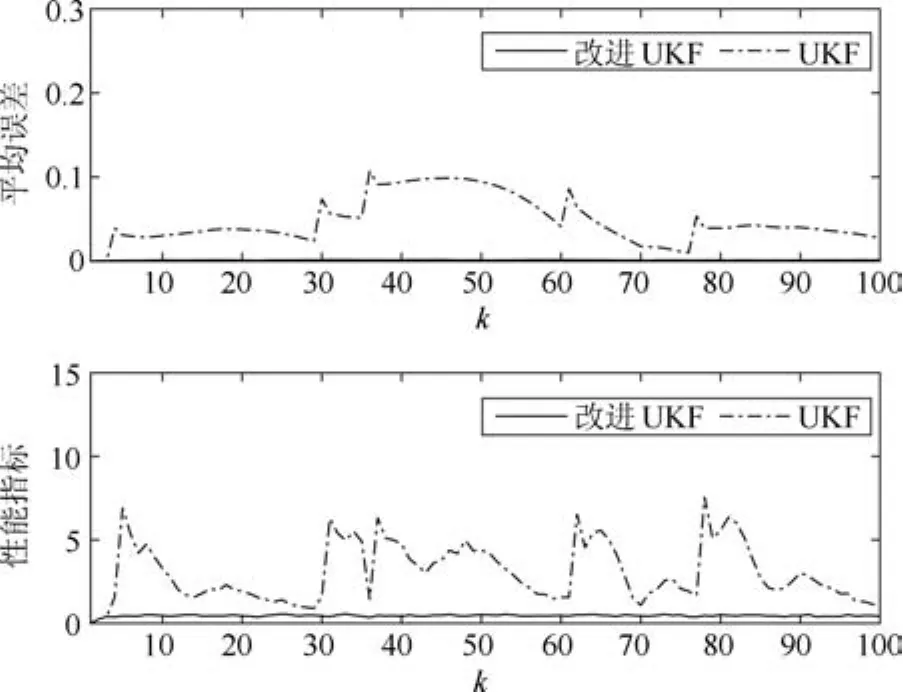
图9 DoS攻击下IEEE 30节点系统采用改进UKF算法和传统UKF算法状态估计误差和性能指标比较(ρ=0.05)Fig.9 Comparison of state estimation error and performance index of IEEE 30-bus system by using new-UKF and UKF methods under DoS attacks(ρ=0.05)
3.2 IEEE 118算例
为了进一步验证所提算法在大规模电力系统上的性能,选取IEEE 118节点系统为研究对象,该系统有487个量测量包括1个电压幅值、64个节点有功注入功率、64个节点无功注入功率、358个支路两端的有功潮流和无功潮流,其中选择69号节点为平衡节点,其电压相角设为零,系统的状态真值和量测量真值由100次潮流计算得到,而实际量测值通过在量测量真值的基础上添加高斯白噪声获得,设定电压值为0.1%的偏差,功率为2%的偏差,且在分析的整个时间段内,设量测误差协方差矩阵R为常数.具体从下面三种情况说明在DoS攻击下所提出的基于无迹卡尔曼滤波的智能电网状态估计算法的有效性.
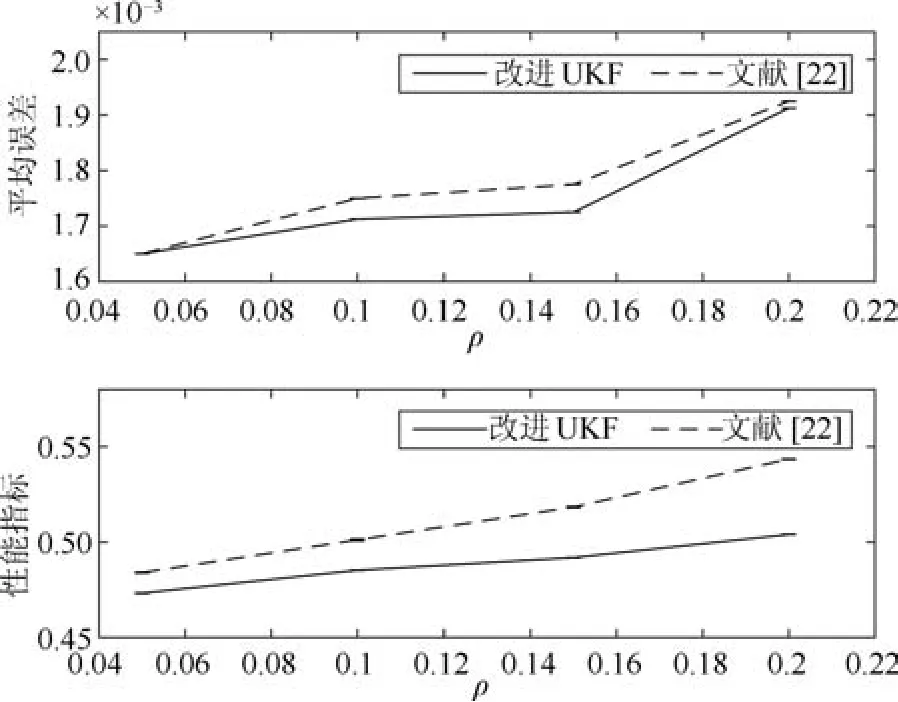
图10 DoS攻击导致4种不同数据丢包概率下IEEE 30节点系统采用改进UKF算法和文献[22]UKF算法状态估计误差和性能指标比较Fig.10 Comparison of state estimation error and performance index of IEEE 30-bus system with four different ρvalues by using new-UKF and review[22]'s UKF methods under DoS attacks
1)不同程度拒绝服务攻击对动态状态估计影响分析.图11表示4种不同数据包丢失概率(ρ=0.05,0.1,0.15,0.2)情况下,针对IEEE 118节点系统进行动态状态估计的估计误差和性能指标.估计误差低于1.2×10-3且性能指标小于1,从中可以看出,本文所提的改进UKF算法的状态估计平均误差和估计性能指标在不同丢包率情况下均表现良好,这表明所提出的改进UKF算法进行智能电网动态状态估计是可行且有效的.
2)本文提出的改进UKF算法与传统UKF算法进行动态状态估计性能比较.针对IEEE 118节点系统,量测数据遭受DoS攻击导致数据包丢失概率ρ=0.05情况下,两种算法分别进行动态状态估计,结果如图12所示.从图12中可以明显地看到,传统的UKF算法状态估计的平均误差和性能指标明显大于本文提出的改进UKF算法的结果,从而表明传统的UKF算法的估计效果明显比本文提出的改进UKF算法性能差,这是因为量测值丢失导致传统UKF算法无法进行正确的系统预测与校正,进而导致状态估计性能变差.
3)本文提出的改进UKF算法与文献[22]算法进行动态状态估计性能比较.针对IEEE 118节点系统,在 4种不同数据包丢失概率 (ρ=0.05,0.1,0.15,0.2)下,本文提出的改进UKF算法和文献[22]算法分别进行动态状态估计,结果如图13所示.由图13可以看到,4种不同数据包丢失概率下本文提出的改进UKF算法的平均误差和性能指标均小于文献[22]所提算法,从而进一步表明本文提出的改进UKF算法具有较好的状态估计性能.
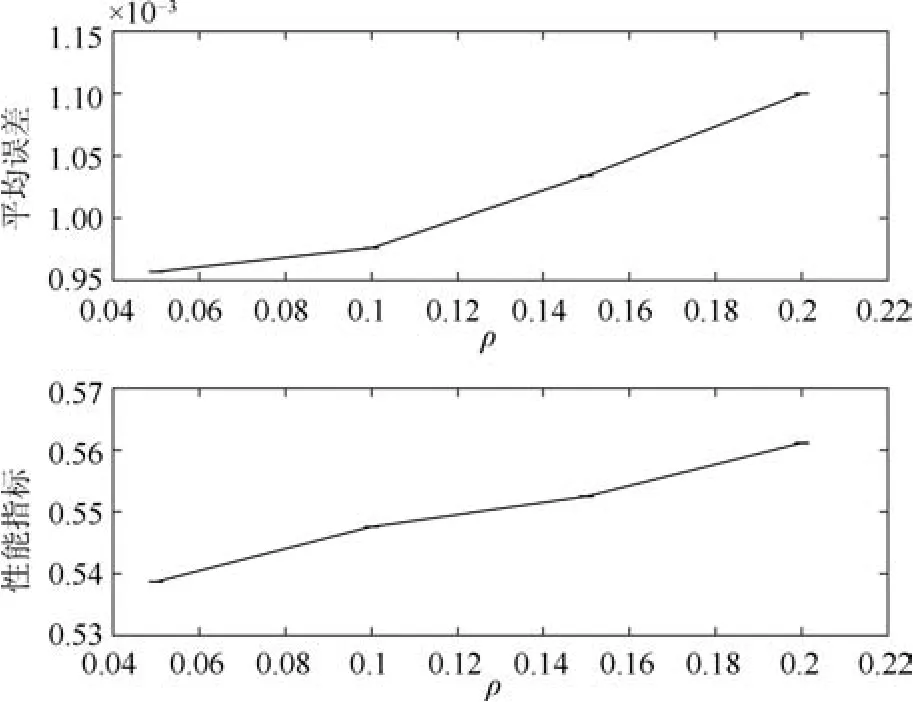
图11 DoS攻击导致4种不同数据丢包概率下IEEE 118节点系统的状态估计误差和性能指标Fig.11 State estimation error and performance index of IEEE 118-bus system with four different ρvalues

图12 DoS攻击下IEEE 118节点系统采用改进UKF算法和传统UKF算法状态估计误差和性能指标比较(ρ=0.05)Fig.12 Comparison of state estimation error and performance index of IEEE 118-bus system by using new-UKF and UKF methods under DoS attacks(ρ=0.05)
4 结论
本文提出了一种适用拒绝服务攻击的改进无迹卡尔曼滤波方法以进行智能电网动态状态估计,首先,利用伯努利分布描述DoS攻击造成的数据丢包特征,并设计了数据补偿策略以重构电力系统动态模型;然后,结合Holt's双参数指数平滑和无迹卡尔曼滤波方法,构造了融合补偿信息的新状态估计方程,基于估计误差协方差矩阵推导了状态增益更新方法,得到了无迹卡尔曼滤波动态估计新方法,为DoS攻击下智能电网动态状态估计提供了一种有效途径.仿真算例表明改进UKF算法在DoS攻击下进行智能电网动态状态估计是可行有效的,且其状态估计性能明显优于传统UKF算法.未来的工作可以进一步探讨如何改进无迹卡尔曼滤波算法,以解决智能电网中同时存在多种类型网络攻击所面临的状态估计问题.
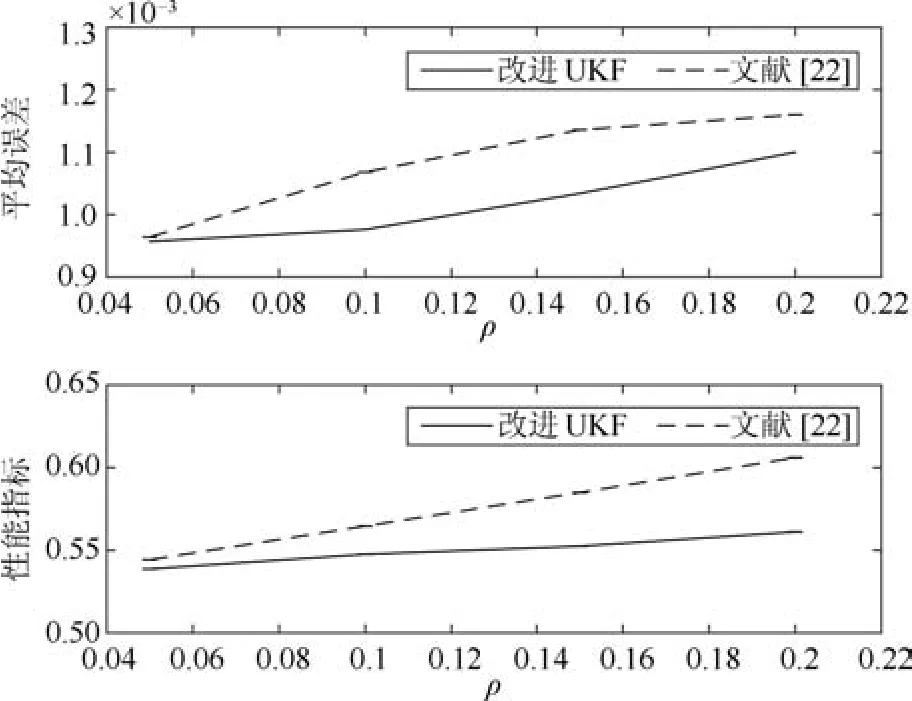
图13 DoS攻击导致4种不同数据丢包概率下IEEE 118节点系统采用改进UKF算法和文献[22]UKF算法状态估计误差和性能指标比较Fig.13 Comparison of state estimation error and performance index of IEEE 118-bus system with four different ρvalues by using new-UKF and review[22]'s UKF methods under DoS attacks