近景摄影测量支持下的地铁盾构管片姿态测量方法及其应用
2019-02-15,
,
(西南石油大学土木工程与建筑学院测绘工程教研室,四川 成都 610500)
在地铁建设施工中,对盾构管片姿态的测量,能够及时地检验地铁盾构机导向,是盾构正确导向和实现顺利贯通的最后一道保险,具有十分重要的意义。盾构隧道管片姿态与盾构姿态是相辅相成的,盾构推进姿态决定了盾构管片拼装姿态,同时成型后的隧道又成为盾构推进的重要保障[1]。盾构管片姿态测量的主要内容是盾构管片安装完之后,对成型后的隧道管片环中心点O的坐标值(xO,yO,zO)进行测量等[2]。
传统的盾构隧道管片姿态测量方法一般采用水平杆法,即选用一根带有刻度的平直杆,水平架设(调节水准气泡居中)在盾构管片环上,通过使用全站仪测量其水平杆中点的坐标,再根据水平杆长度和隧道半径(勾股定理),计算盾构环的圆心点O坐标,实现对盾构管片姿态的测量(如图1所示)。
由于传统的盾构管片姿态测量方法存在作业时间长,不能及时获取测量结果等缺点。本文提出使用近景摄影测量的方法和技术解决盾构管片姿态测量的问题。近景摄影测量这些年发展十分迅速,具有非接触性,及时获取大量数据,受到周围环境影响较小,能在恶劣条件下作业等特点[3],使得普通的数码相机大量应用于各个领域的拍摄测量。本文使用数码相机对盾构管片环进行拍摄,结合光束法平差和空间三点定圆心原理计算测量结果,实现近景摄影测量在地铁盾构管片姿态测量中的应用。
1 近景摄影测量计算盾构管片姿态的原理
1.1 光束法平差
光束法平差作为摄影测量解析中重要的一种方法,其基本思路是将先用已知点求解外方位元素,再利用前方交会求解待定点坐标的过程变为一个整体,用少量控制点及待求的地面点,在像对内同时求解像片外方位元素与待定点坐标[4]。光束法区域网空中三角测量是以一个摄影光束(即一张像片)作为平差计算的基本单元,共线条件方程作为理论基础[5],则对某一像点可以列出的误差方程式为
V=AX+Bt-l
(1)
式中
又因控制点坐标改正值dX,dY,dZ为0,构造法方程为
(2)
求出所有未知数改正数后,叠加到初始值上,然后反复计算直至满足精度。
同时,由于数码相机本身内方位元素未知,存在畸变等因素的影响,一般需要在使用前对数码相机进行相机检校来确定相机的相关参数,从而提高影像解算的精度[6]。数码相机检校的主要内容是,测定相机的像主点位置(x0,y0)、主距f和多种畸变参数[7]。其中镜头畸变模型主要分为径向畸变模型,偏心畸变和薄镜畸变等[8]。相机的检校方法主要包括:传统的相机检校方法、相机自标定法及基于主动视觉相机标定法等[9-11]。
传统的近景摄影测量方法一般采用单基线进行影像的解算,难以兼顾自动匹配和交会[12]。本次试验采用的多基线近景摄影测量系统lensphoto v2.0软件,能够对多张相片进行同名点匹配,提高试验精度。多基线近景摄影测量方法的提出,解决了传统近景摄影测量交会精度低和影像难匹配的问题[13]。对比传统摄影测量方法,多基线摄影测量基线长度和交会角都较小,并且由于增加多于观测值,保证了交会精度和影像匹配的精度。
1.2 空间圆的圆心三维坐标计算方法
拍摄获取照片后,通过lensphoto v2.0软件求解出未知标记点的坐标,然后利用Matlab编写空间三点定圆心程序,计算管片环圆心点的坐标。空间三点定圆心的原理[14]主要是:设3点M、N、P坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),圆心点O坐标为(x0,y0,z0)。设点M、N、P到圆心O的距离分别为R1、R2、R3,则任意两点到圆心距离相等,且等于半径。
R1=R2=R3=R
(3)
又因为点M、N、P和圆心点O,4点共面,可以列出以下方程
(4)
根据式(3)、式(4)即可求得圆心点O的坐标。试验过程中,为了减少偶然误差等引起的误差,一般在环上多布置些标记点,这样在计算最后的结果就存在了多余观测量,参考GPS静态绝对定位平差的相关知识解决问题[15],提高结果的精确度。
1.2.1 圆心半径公式线性化
令(X0,Y0,Z0)、(δx,δy,δz)分别为圆心点坐标的近似值和改正数,将式(3)按泰勒级数展开,并令
(5)
其中
取一次微小项的情况下,半径方程线性化形式为
(6)
1.2.2 圆心定位的解算
对于圆心点,由3点确定圆心,则j=(1,2,3)。上述式(6)为一方程组,则方程组形式如下
⟹AiδX+Li=0
(7)
式中
当观测标记点数多于3个时,则须通过最小二乘平差求解,此时式(7)可写为误差方程组形式
Vi=AiδX+Li
(8)
根据最小二乘平常求解未知数
(9)
2 研究区域与数据获取
2.1 研究区域
试验的地点选择在成都地铁5号线龙马桥站(位于成都天府新区内)附近一处已经挖掘完成的地铁隧道内。其中隧道直径为5.7 m,隧道相关配套工作已经完成。洞内有照明灯,但离洞口越远,照明条件越差,一侧铺设有栈道,方便施工人员进出。洞口的几个管片有水渗出。现场具体情况如图2所示。
2.2 数据获取
根据本次试验目的,结合现场的实际情况,选择合适的标识牌作为本次试验的人工标志点。同时由于本次试验最主要的目的是利用管片环上点的坐标计算管片环圆心点的坐标,因此人工标志点的铺设是否在一个横切面上,很大程度上影响了试验的测量精度。结合现场情况,具体的铺设方法为沿着管片环与环之间的间隙铺设标志点,如图3所示。
铺设人工标志点是从进洞口方向沿隧道中心线向里,每环依次铺设标识牌。铺设完人工标志点后,利用全站仪测量控制点的坐标,作为近景摄影测量计算的已知数据。然后架设相机对盾构管片环进行拍摄,本次试验主要使用Nikon D3400相机,固定焦距18 mm进行试验图片的拍摄,相机有效像素约为2416万。具体的拍摄方法为从进洞口方向沿隧道中心线向里,正对管片,每间隔0.5 m拍摄一次照片,如图4所示。
拍摄完照片后,同步进行水平杆法盾构管片姿态测量试验。水平杆法的理论在前文中已进行过叙述。其具体的操作流程为:首先在盾构管片环上架设水平杆,本次试验用到的水平杆长度为3.515 m,调整水平杆使水准气泡居中;然后使用全站仪测量水平杆中点的坐标,则可以根据隧道半径和水平杆长度计算得到管片环圆心点坐标。
3 数据处理与分析
本次试验使用软件lensphoto v2.0进行影像数据的处理,其数据处理的一般过程为:打开软件→新建工程→空三匹配→引入控制点→空三交互→点云编辑(未知标识牌坐标)。图像匹配精度为0.001 25 m,小于1/2个像素,满足解算要求。导入控制点坐标,生成点云获取待定点的坐标。光束法平差后,在X、Y、Z3个方向的中误差分别为:0.000 4、0.000 8、0.000 3 m。
通过计算得到管片环上所有待定标识牌点坐标后,结合Matlab编写的空间三点定圆心坐标程序,计算管片环圆心点坐标。两种测量方法计算的环圆心点坐标结果对比见表1。

表1 试验结果对比 m
表1中的Δr表示近景摄影测量结果与水平杆法测量结果之间的距离。可以看出,两种方法在点位距离上有3 cm以内的偏差。主要原因为:①用空间三点定圆心法计算管片环圆心点坐标的时候,假设地铁隧道为一个标准圆,而实际情况下,隧道不可能为一个标准圆;②水平杆所架设对应的管片环与近景摄影测量标志点铺设对应的管片环难以严格保证在同一个圆内。对比水平杆法测量的结果,可以说明此方法能够满足地铁盾构管片姿态测量的相关工作;同时,由于在盾构掘进过程中,横向和纵向偏差影响贯通精度,需要对两种方法的水平差和高程差进行一个比较分析。两种方法的平面差(x,y)与高程差(z)结果对比见表2。
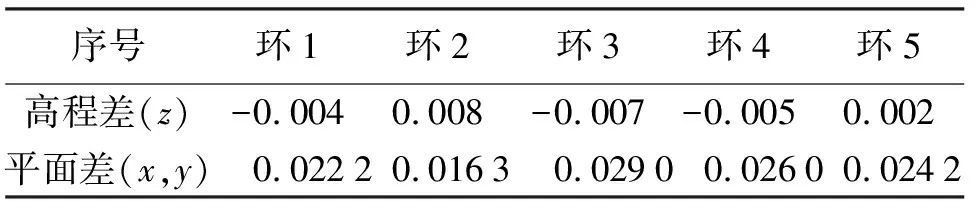
表2 平面差和高程差对比 m
表2中平面差表示横向误差,即两种方法计算出的结果在横向距离上的偏差;高程差表示两种方法在纵向距离上的偏差,是用水平杆法的计算结果减去近景摄影测量的计算结果。纵向上误差在1 cm以内,横向误差在3 cm以内。总之,试验表明:近景摄影测量法能够代替水平杆法进行盾构管片姿态测量,进而能够检核盾构导向。
4 结 语
本文针对传统的地铁盾构管片测量方法(水平杆法)在实际工作中的不足,提出了使用数字摄影测量的方法,结合lensphoto v2.0软件获取管片环上铺设标识点的坐标,利用Matlab编写盾构圆心点坐标计算程序,得到地铁盾构管片的姿态。本文的主要结论如下:
(1) 使用近景摄影测量的方法进行地铁盾构管片姿态的测量,相比传统的测量方法具有实时性和智能性,明显节约了时间和人力成本。
(2) 近景摄影测量法纵向上误差在1 cm以内,横向误差在3 cm以内,能够满足通过测量管片姿态检核盾构导向的目的,可以替代传统的水平杆法进行地铁盾构管片姿态的测量。
(3) 以数码相机为测量设备进行施测,价格低廉且高效,具有很高的推广价值。