利用月掩星现象测量月球公转周期
2019-02-13李壮壮崔士举
李壮壮,崔士举
(东北师范大学 物理学院, 吉林 长春 130024)
月亮在天空自西向东移动,有时候会把天上的星星遮蔽起来,这种现象叫做“月掩星”[1]. 观测月掩星能帮助我们研究月亮上有无大气,利用月掩星光电观测还可以测定恒星的角直径[2]、多颗恒星的分离[3]及测量地球自转的长期变化[4]等. 所以世界各国天文台都很重视观测月掩星的现象[1].
在月掩星现象即将开始阶段(可以不考虑边缘衍射[5]),通过观测月球相对遥远恒星的相对视角随时间的变化,加上地球自转的影响,结合电脑软件处理,在短时间内得到月球公转周期. 由于时间短,现象普遍,该实验可以用作科普实验,也可用作培养学生兴趣和动手能力的教学实验. 长期观测,则可以研究月球公转角速率的变化.
1 实验研究
该实验进行了2次观测,第1次在2018年3月25日19:10,第2次在2018年7月23日21:00,2次均在东北师范大学物理学院天文台观测.
1.1 实验仪器
实验使用了Sky-Watcher 150PDS望远镜(D=150 mm,F=750 mm)[图1(a)],ZWO ASI120MC摄像头[图1(b)示]、数据线、双轴电跟、联想牌笔记本电脑.

(a)望远镜

(b)摄像头图1 实验仪器
1.2 实验观测
1.2.1 实验现象
图2是第1次观测的图片,图3是第2次观测的图片,箭头指向恒星. 由于拍摄的照片不易观测,图2~3均使用了Photoshop cs8.01软件进行反相,调节对比度为40%,亮度为40%,及调节色阶处理,最后对星点进行了颜色加深处理.

(a)开始观测时

(b)大约6 min后图2 第1次观测

(a)开始观测时

(b)大约6 min后图3 第2次观测
1.2.2 数据测量及处理
月球公转轨道参量和物理参量如下[6]:近地点距离362 570 km,远地点距离405 410 km,半长轴s为384 399 km(本文以半长轴为月球轨道半径计算),轨道周期为27.321 582 d,平均半径1 737.10 km,质量7.347 7×1022kg. 2次观测处理方法相似,以第1次处理方法为例.
1)定标
将视频中的某一帧图片提取出来并保存为图片格式(此次提取最后一帧),用Photoshop调整亮度和对比度并进行usm锐化处理,使之更清晰,再将此图片导入到迅捷CAD编辑器,利用该软件作图和测量的功能进行定标,步骤为:
a. 在图片上显示的部分月面的边缘部分标记3个点,并用线段连接相邻的2个点;
b. 画出这2条线段的中垂线,2条中垂线的交点即为月球在此平面投影出的圆的圆心;
c. 利用该软件的测量功能,测量圆面的边缘到圆心的距离,得到1个数值,在测量数据窗口设置尺寸中填入月球平均半径,会自动生成相应的比例;
d. 在该比例下,测量出此图像画面的长,得到的数据记录下来,定标结束. 如图4(a)所示.

(a)定标

(b)建立坐标图4 定标建系
2)跟踪测量
打开Tracker软件,将完整视频导入,利用Tracker软件进行月球和恒星相对位置的跟踪和测量,步骤为:
a.建立坐标轴,选图片左下角作为直角坐标系的原点如图4(b)所示;
b.建立定标尺,将定标尺与视频画面的长重合,将用CAD编辑器测出的定标数据填入,回车键确认;
c.建立矢量B,将视频调到第1帧,记下月球某点在图中位置及恒星在图中位置,之后找到月球恰好要遮到恒星的那帧图像,设置视频只播放到此位置,并记录此时恒星和月球某点(遮到恒星处)相对于图像的位置;
d.利用矢量B画出恒星相对图像(建立的坐标系)的位矢B0,月球相对图像的位矢B1,找到月球相对于恒星的相对位矢B2,如图5所示;
e.建立矢量A,设置视频每次间隔10帧显示1次画面,将每次画面中的月球某固定点(月球遮到恒星的点)与恒星点用矢量A连接,并保持矢量Ai平行于位矢B1,画出若干位矢,即A1,A2,A3…,如图5所示;

图5 跟踪测量
f.将测量的数据导入Excel表格,并将帧数换成对应时间,在Origin软件中画出位矢A的长度随时间的变化曲线,即月球相对于恒星的距离在月球公转轨道切面(月球直径远小于地月距离,近似认为在公转轨道切面上)的投影长度随时间的变化曲线,如图6所示;
g.利用线性拟合得到月球相对恒星在运行轨道切面投影的速度,通过近似计算得到月球公转轨道周期. 根据图6所示线性拟合方程
l=-0.700 5t+460.5 ,


图6 月球和恒星平面投影相对距离l随时间t变化
2 理论修正
2.1 恒星认为不动的解释
第1次拍摄时间在2018年3月25日 19:10分,通过Star Walk确定视频中的移动的亮点为HIP 34243星,距离太阳的平均距离为3 545.254 ly,并假设此星移动速度为光速(实际远小于光速),观测时间约为642 s,则移动视角为β=5.742×10-9rad,远小于10-6量级,而恒星运动速率实际是远远小于光速的,故更可以认为恒星是静止不动的.
2.2 修正地球自转影响
以上计算结果和实际月球轨道周期对比相差很大,主要原因是地球自转的影响,对于月球自转,由于自转周期和地球基本同步,在较短的时间内其影响可忽略不计. 如图7所示,其中r是图8中的r,不是地球半径;对于图8,开始观测时观测者在C位置,一段时间后,到D位置,月球从蓝色位置到白色位置,其中是CE长度,近似等于地月距离s(r≪s,故r+d≈d≈s),而地球自转产生的影响主要在于CD,故可以简化模型,变成如图7所示,其中h为观测者认为月球移动的距离,h+x为月球实际运动的距离,s为地月距离,r为如图2中r,θ为观测时间内地球转过的角度(很小),l为恒星距离地球的距离(l≫s),α为观察者的地理纬度.

其中地球自转角速度为
月球绕地公转半长轴为[6]:
s=384 399 km.

图7 简化模型

图8 三维模型
在计算中可以简单地把地球作为圆球,半径约为[7]R=6 371 km,观测地的纬度α=43°51′,则

算得周期为

与实际轨道周期:27.322 d相差少于1 d,相对偏差为η=1.09%. 可见此方法还是可行的.
图9为第2次测量的数据处理,同上的处理方法及加上地球的自转的影响,使用Star Walk软件确定第2次观测对应的亮星为HIP82465星,到太阳的平均距离为982.42 ly,也远远大于地月距离,在短时间观测可以近似认为亮星位置保持不变. 最终求得3次计算的公转周期分别为:27.351 d,27.205 d,27.091 d,平均约为27.216 d,接近实际运行周期27.322 d.

(a)星月地夹角θ随时间t变化

(b)星月地夹角θ随时间t变化
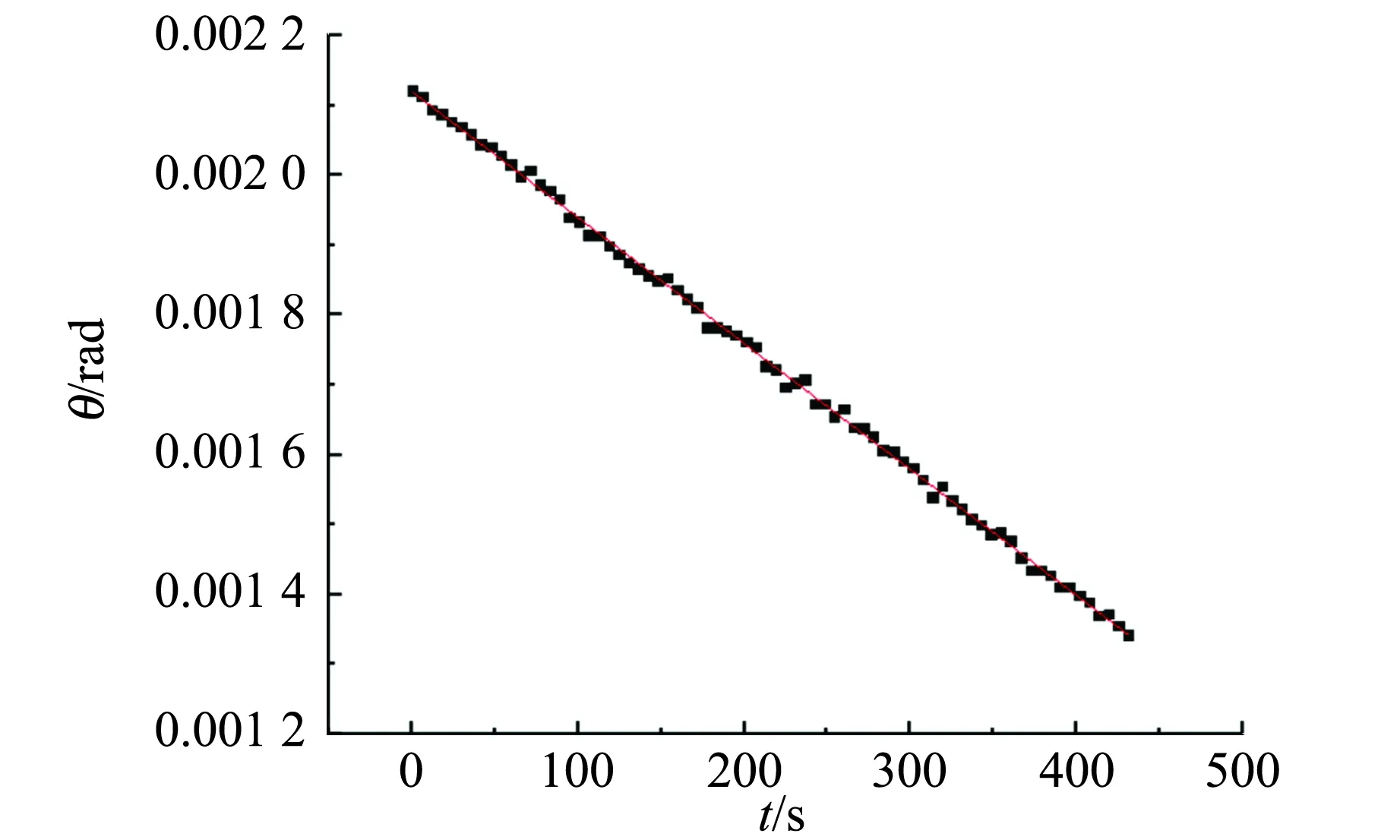
(c)星月地夹角θ随时间t变化图9 第2次观测结果
3 误差来源及分析
误差产生来源于主要有:
1)实际轨道为椭圆轨道,而本实验近似为简单的圆轨道;
2)跟踪月球和恒星距离变化过程中不能完全跟准在月球上的固定点,采用多次跟踪测量求平均值(如第2次观测处理),但还会存在误差;
3)修正地球自转影响时为方便采用了近似.
以第1次观测为例,由于月球绕地球运动是椭圆轨道,而本文按圆形轨道计算,实际月球绕地球公转时会有近地点和远地点,在不同的位置月球公转的线速度是不同的,而这里采用的方法测得的是观测时间内的月球平均公转线速度,相对于月球运转轨道周期来说可以认为是瞬时速度大小,此速度应该是在近地点和远地点速度大小之间,通过以上观测和计算得到第一次观测时月球在该时间内的平均公转线速度大小为
v=ω实s=1 036.17 m/s.

月球在远地点的瞬时速度大小为

可见实际观察的瞬时速度大小在其范围内,可认为是可行的.
4 结果与讨论
通过以上的处理和计算可以发现用月掩星现象测量月球公转周期的方法是可行的,由于月掩星现象相比于月食现象更普遍,而且观测时间较短,使用仪器简单. 虽然会产生一定误差,但用于天文学教学、科普教学还是可行的. 改进更精准的方法和应用更全面的理论则可以用于科学研究,长期观测以考察地球自转和月球公转的变化[4]等都具有实际意义.
