创新实验方案 培育学科素养——探究加速度与力、质量的关系实验方案的改进
2019-02-10汪小明
汪小明
(宝安第一外国语学校,广东 深圳 518128)
本文以人教版高中物理教材必修1中“实验:探究加速度与力、质量的关系”的参考案例2为例,由于其实验方案不完善,“钩码质量远小于小车质量”的条件容易被破坏,从而使该实验存在较明显的系统误差.我们可以通过创新实验方案,改变研究对象、改进测量手段、改进实验原理3种途径来消除系统误差给本实验带来的影响.在创新实验方案的过程中,可以多维度培养学生的科学思维,提高学生的物理学科素养.
1 传统实验方案分析
人教版教材中“实验:探究加速度与力、质量的关系”中参考案例2的实验装置如图1所示.
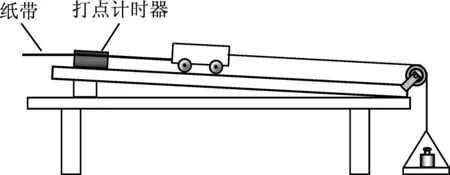
图1 实验装置图
1.1 实验原理
本方案中,用打点计时器直接测量小车运动的加速度,采用悬吊重物的方法为小车提供拉力,平衡摩擦力后,可认为该拉力等于小车所受合力.增减盘中砝码的个数以改变拉力的大小,增减小车中砝码的个数以改变小车的质量.利用控制变量法,探究小车的加速度a与其所受的合力F,以及小车质量M之间的关系.
设小车的质量为M,盘和盘中砝码的质量为m,绳子上拉力大小为F,小车与砝码和盘的加速度大小均为a.对小车有
F=Ma.
(1)
对盘和砝码有
mg-F=ma.
(2)
联立两式得
(3)
由(3)式可看出,只有当m≪M时,才有拉力F近似等于盘和盘中砝码的重力mg.故按照该实验方案进行实验,需要满足条件m≪M.
1.2 数据记录和处理

1.3 误差分析
2 创新实验方案设计
2.1 改变研究对象
创新方案1: 将小车和钩码整体当做研究对象.
利用图4所示的实验装置探究加速度与力、质量的关系.设小车的质量为M,钩码的质量为m,实验开始时已经平衡了摩擦力.

图4 实验装置图
(1) 实验原理.
本方案中,依然是通过打点计时器直接测量小车运动的加速度,采用悬吊钩码的方法为小车提供拉力.联立(1)、(2)两式可得
(4)
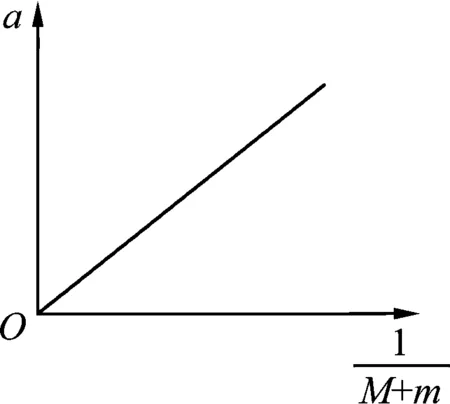
从(4)式可以看出a与mg成正比,跟M和m之和成反比.如果把小车和钩码整体当做研究对象,它们的加速度则是由钩码的重力产生.这样,我们就可以用控制变量法来研究加速度a与力F和质量(M+m)的关系了.
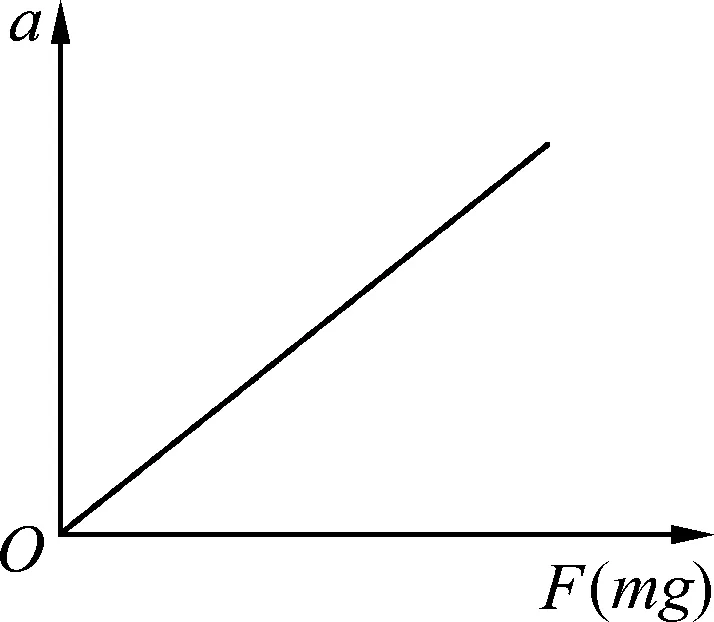
图5 a-F(mg)关系
(2) 数据记录和处理.
通过将将悬挂端的钩码移动到小车上,或者小车上的钩码移动到悬挂端,以保持总质量(M+m)不变,同时又改变了合力F(mg).进行多次实验得到多组实验数据,根据实验数据做出a-F图像,如图5所示.图像表明,小车的加速度a与合力F成正比.
图关系

(3) 优缺点分析.
缺点:实验原理学生较难理解.
2.2 改变测量手段
创新方案2: 利用弹簧测力计和轻质动滑轮.
利用图7所示的实验装置来探究加速度与力、质量的关系.设小车的质量为M,盘和盘中重物的质量为m,实验开始时已经平衡了摩擦力.
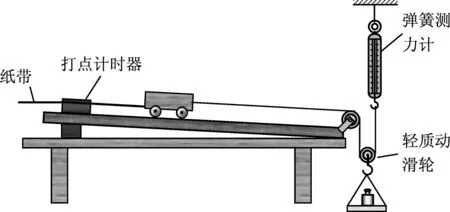
图7 实验装置图
在图7所示的装置中,弹簧测力计是直接与细绳相连的,所以可以准确地测出细绳上的拉力大小.
(1) 实验原理.
本方案中,依然是用打点计时器来测量小车运动的加速度,小车所受细绳的拉力可以直接由弹簧测力计的示数来表示.保持小车质量M不变,增减盘中重物的质量以改变拉力的大小,从而探究小车的加速度a与其所受的合力F之间的关系.

图8 a-F关系
(2) 数据记录和处理.
进行多次实验得到多组实验数据,根据实验数据做出a-F图像,如图8所示.图像表明,小车的加速度a与合力F成正比.
(3) 优缺点分析.
优点:本实验中是利用弹簧测力计直接读出细绳上拉力的大小,用来表示小车所受到的合力,这是拉力的准确值.不需要测盘和重物的质量m,不需要满足盘和重物的质量远小于小车质量的条件,因此该方案从原理上就消除了系统误差给实验带来的影响.同时,该实验操作也较为方便.
缺点:在读取弹簧测力计的示数时,由于指针不稳定,因此读数时的偶然误差较大;另外,该方案还有一个很大的不足是,不能探究F一定时a与M的关系.这是因为,当改变小车的质量时,系统的加速度会同时发生改变,细绳上的拉力也就发生了改变.所以,在实际操作时很难保持合力F不变.
创新方案3: 利用力传感器和位移传感器.
按照图9所示连接实验装置,钩码与小车相连的细绳上加装一个力传感器.位移传感器的发射器安装在小车上和小车一起沿轨道运动,位移传感器的接收器固定在轨道一端.实验开始时已经平衡好摩擦力.

图9 实验装置图
(1) 实验原理.
本方案中,利用力传感器直接读出细绳上的拉力F,即为小车所受到的合力F.利用位移传感器可以得到小车位移随时间的变化关系,借助x-t2图像的斜率表示a/2,从而间接测出小车的加速度a.保持小车质量M不变,增减钩码的个数以改变拉力F的大小,从而探究小车的加速度a与其所受的合力F之间的关系.
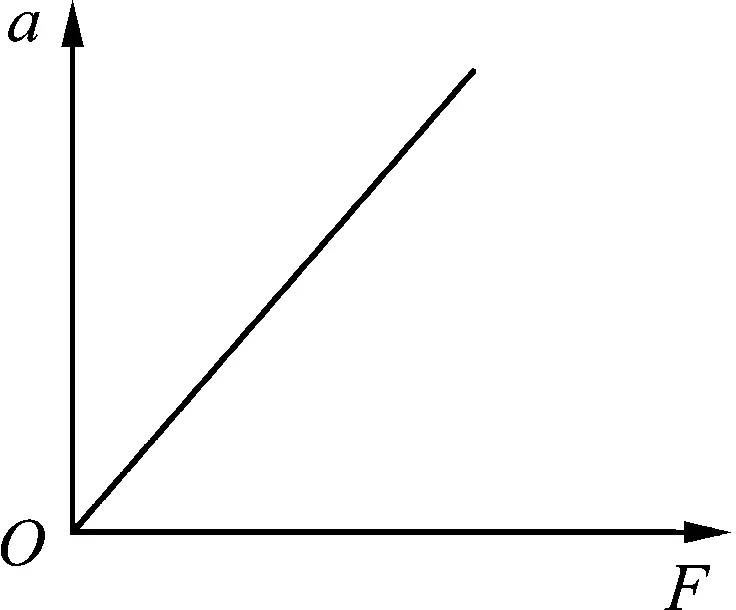
图10 a-F关系
(2) 数据记录和处理.
多次实验得到若干组实验数据,根据实验数据画出a-F图像,如图10所示.图像表明,小车的加速度a与合力F成正比.
(3) 优缺点分析.
优点:本实验方案中用位移传感器间接测出小车的加速度a,这样的测量手段科学,数据准确可靠.利用力传感器测出小车所受拉力F的真实值,而不是用钩码的重力代替拉力,因此不需要满足m≪M的条件,实验时也不需要测钩码的质量m.利用力传感器能够有效消除系统误差.
缺点:该实验方案不能探究在F一定时,a与M的关系.其原因与方案2中的原因一样.
2.3 改变实验原理
创新方案4:利用气垫导轨、滑块和光电门.
以上实验方案的设计中都有一个共同的特点,即都属于绳连两个物体组成系统,小车在绳子拉力的作用下做匀加速运动.下面这个实验方案则是从实验原理上进行改进创新,如图11所示.

图11 实验装置图
气垫导轨一端置于水平桌面,另一端搁置在高度可以调节的升降平台上.弹簧秤平行于导轨固定在顶端,两个光电门与数字计时器(MUJ-5B型)相连,相隔一定距离固定在气垫导轨上.接通气泵、剪短与弹簧秤相连的细线,带遮光条的滑块可以沿倾斜的气垫导轨匀加速下滑,遮光片将依次通过两个光电门.
(1) 实验原理.
利用天平测出滑块的质量M;利用弹簧秤测出滑块沿斜面向下运动时的合力F;利用游标卡尺测出遮光条的宽度d,提前输入到MUJ-5B型号的数字计时器中;利用光电门和计时器可以直接测出滑块运动的加速度a.采用控制变量法进行以下实验:通过调节升降台的高度改变导轨的倾角,可以实现保持滑块质量M不变的情况下,改变合力F;通过在滑块上面增加配重片,同时调节升降台高度,可以实现保持合力F不变,而改变滑块质量M.
(2) 数据记录和处理.

图关系
保持滑块质量M不变.改变导轨的倾角,记录相应的弹簧秤示数F和计时器显示的加速度a.多次实验得到若干组实验数据,根据实验数据画出a-F图像,与图10相同.图像表明,小车的加速度a与合力F成正比.
(3) 优缺点分析.
优点:本实验中,用弹簧秤测出滑块的重力沿斜面的分力来表示合力,无系统误差;用MUJ-5B型号的数字计时器直接测出滑块运动的加速度a,误差较小.采用该实验方案,既可以探究a与F的关系,又可以探究a与M的关系.此外,本实验通过改变导轨的倾角来改变合力F,增加配重片改变质量M,简单易行、操作方便.
缺点:需要测量滑块的质量、遮光条的宽度、滑块的重力沿斜面的分力,在测量这些物理量时,存在读数时的偶然误差.
3 结语
以上4个实验方案是对传统实验方案的创新突破,针对传统实验中存在的系统误差,从研究对象、测量手段、实验原理3个方面对实验方案进行了改进和优化,其最终目的是为了减小或消除系统误差.
