基于K-means聚类的磁瓦缺陷图像分割方法
2019-02-07马旭东袁锐波李洪锋
马旭东 袁锐波 李洪锋

摘要:为了实现磁瓦图像中缺陷的准确检测,以分割磁瓦端面崩块缺陷为目的提出一种基于K-means聚类的分割方法。磁瓦图像采集的关键技术是光源选用,分析传统的磁瓦图像分割方法——阈值分割,并以迭代选择阈值算法作为对比算法进行介绍;着重剖析K-means算法的基本聚类原理,并引出其算法实现流程。采用两种算法对磁瓦端面图像进行分割。结果表明,基于K-means聚类算法对磁瓦图像进行分割,能够正确分割出磁瓦端面的崩块缺陷。
关键词:磁瓦;缺陷检测;崩块缺陷;K-means;阈值分割
DOI:10.11907/rjdk.191303
中图分类号:TP317.4 文献标识码:A 文章编号:1672-7800(2019)012-0180-03
0引言
用永磁铁氧体材料制成的瓦形磁体(简称磁瓦)是生产永磁电机磁体的主要元件,其质量好坏关系到电机的使用性能。若具有缺陷的磁瓦用于工业机器人或其它工业产品,将会造成无法挽回的损失。当前,磁瓦缺陷的检测主要通过人眼视觉实现。人工检测方式在效率和精确度上会随检测时间的延长而降低,而且招工难、成本高。
近年来,采用机器视觉的方法对磁瓦进行缺陷检测,显著提高了磁瓦生产企业的产品质量和生产效率。它不需要接触磁瓦就可完成检测,防止检测时磁瓦被损坏,同时速度快、精度高,促进了相关领域研究及工业应用。但是,磁瓦类型众多,每个磁瓦除了6个表面还有许多倒角,其缺陷类型非常复杂,有崩块、裂纹、起层、孔洞等。采用基于机器视觉的方式对磁瓦缺陷进行检测,在技术上存在较大难度。
磁瓦崩烂型缺陷主要发生在磁瓦各个面的边缘,根据磁瓦各缺陷面轮廓特征不同于正常磁瓦加以判别。磁瓦图像分割的目的是将磁瓦图像中包含缺陷的整个面分割出来,从而方便轮廓、纹理等特征提取。傳统图像分割主要采用阈值分割算法对磁瓦表面图像进行分割。但磁瓦图像采集时存在缺陷对比度低、亮度不均匀等问题,因此不能很准确地分割出缺陷表面,误判率高。
鉴于此,本文采用K-means(K-均值)聚类分割算法对磁瓦以灰度信息聚类的方式进行分割,同时与传统阈值分割法进行比较。结果表明,本文图像分割方式能够准确分割出磁瓦端面的崩块缺陷。1磁瓦图像采集
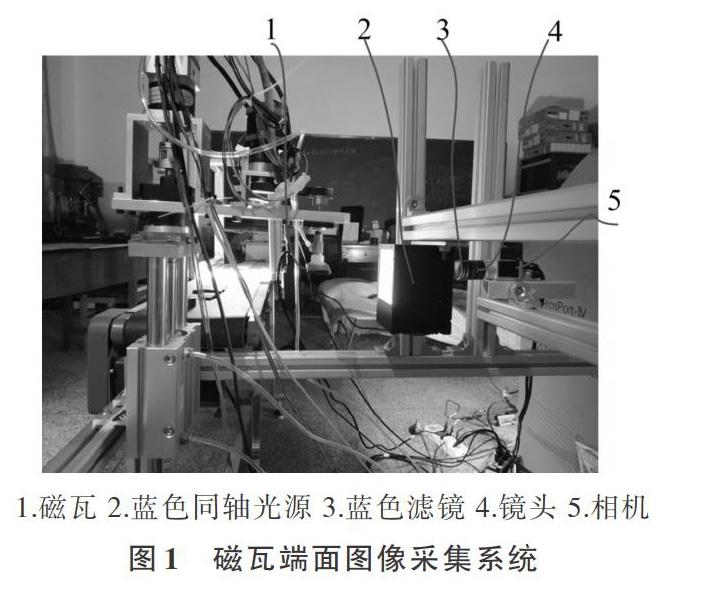
图像采集系统主要包括光源、电荷耦合设备(ChargeCoupled Device,CCD)相机和光学镜头,其功能是完成产品表面图像的采集。在光源照明下,磁瓦端面会反射光线,被反射回来的光线通过镜头聚焦,然后将磁瓦端面成像在相机传感器上。至此,磁瓦端面的光信号经过这些设备变为电信号,再通过数据传输到计算机,变成能被计算机处理的数字信号。被采集回来的磁瓦端面图像质量,直接决定了其缺陷分割精度。光源选择及使用方式,又直接影响到被采集回来的磁瓦端面图像质量。一个好的光源选型,不仅可以减弱自然光对图像采集时的干扰,显现磁瓦图像缺陷的重要特征,还可以抑制背景及其它不需要的特征,从而获取对比度高的磁瓦端面图像。增强磁瓦端面图像与后景对比强度的方法之一是使用单色光源照明。同时,为了使磁瓦端面图像获取均匀的光照,使用同轴漫射光源,因为使用半透半反镜将光反射到磁瓦端面上,相机不需要通过小的摄像孔采集图像。本文光源采用蓝色同轴光源,波长为460nm-475nm。
镜头采用焦距6mm、分辨率为200万像素的工业镜头;相机采用120帧速率的Basler CCD面阵相机。因其对红外光敏感,在镜头前加上中心波长为470nm、带宽30nm的蓝色滤镜以避免图像过亮以及图像颜色变化。整个磁瓦端面图像采集系统如图1所示。
2分割算法理论分析
2.1阈值分割
阈值分割的原理是通过灰度像素幅度实现分割,它是图像分割的基本技术之一,具有快速、简单、有效的特点。图像像素点根据设置的阈值分为两个有意义的区域,阈值的确定存在较大难度,也直接决定分割精度和分割后区域描述的正确性。
本文采用循环迭代计算并确定阈值的方式实现阈值分割,作为磁瓦端面图像分割的对比算法。其基本操作流程是:
(1)设定一个初始阈值T。
(2)将图像像素点大于阈值T的区域设定为区域R,,图像像素点小于阈值T的区域设定为区域R2。
(3)分别求出区域R1和R2中所有像素的平均灰度值为u1和u2。
(4)重新计算新的阈值:
(5)重复步骤(2)-步骤(4),直到迭代所得的阈值T小于最初设定的阈值T。
2.2K-means聚类分割
聚类时,样本只要被划人某个类别就不会再变化,因此对分类方法的精确度要求很高。采用动态聚类法可以避免初始分类不够精确而带来的分类效果差的问题。其算法基本思想是通过设定一些初始聚类中心,让样本先按照距离聚类中心远近划分到相应的类别中,得到初始分类;然后用某种原则修正,直到分类合理为止。动态聚类法流程如图2所示。
K-means聚类算法具有计算速度快、聚类效果好等优点,是最常用的动态聚类算法之一。以图像的像素为数据点,按照指定的簇数进行聚类,最终将每个像素点以其对应的聚类中心进行替代,重新组成图像。
误差平方和准则被用作K-means聚类方法使用的聚类准则,通过反复迭代优化聚类结果,使所有样本到各自所属类别的中心距离平方和最小。
第i聚类Γi中,样本均值mi与样本数目Ni的关系如式(2)。
3结果分析
在磁瓦端面图像采集过程中会存在一定的噪声,使得原始图像存在干扰导致边界模糊,一些细微结构就会被隐藏,因此在对图像进行分割前,需要先对采集回来的图像进行预处理操作。本文在对输入图像进行中值滤波预处理后,采用K-means聚类算法对磁瓦端面图像进行分割并与传统阈值分割算法进行对比试验。分割结果如图3所示。
通过图像采集系统采集的磁瓦大端面图像如图3(a)所示,该图像中存在2处崩块缺陷,经过阈值分割得到的区域如图3(c)所示,该方法只能分割出大端面的一个缺陷区域,而经过K-means聚类分割得到的区域如图3(e)所示,该算法可以正确分割出两个缺陷区域;通过图像采集系统采集磁瓦的小端面图像如图3(b)所示,该图像中存在3处崩块缺陷,经过阈值分割得到的区域如图3(d)所示,该方法无法分割出小端面的缺陷信息,而经过K-means聚类分割得到的区域如图3(f)所示,该算法可以正确分割出3个缺陷区域。
通过对比两种算法对磁瓦缺陷图像的分割结果可知,K-means聚类分割算法可以正确分割出磁瓦端面的崩块缺陷,而阈值分割算法分割不稳定。
4结语
本文为了实现对磁瓦缺陷的准确检测,通过分析磁瓦图像采集系统硬件对图像采集的影响,确定一套有效的方案。在搭建完图像采集系统并采集磁瓦端面图像后,采用先进的K-means聚类算法对磁瓦图像进行分割。与传统阈值分割算法相比,K-means聚类算法能够正确分割磁瓦端面图像崩块缺陷。为了实现磁瓦图像缺陷的最终提取,需要进一步对分割出来的图像进行轮廓、纹理等特征提取。由于崩块缺陷主要发生在磁瓦边缘处,因此本文只通过磁瓦端面进行了缺陷图像分割研究,并未对裂纹、起层等其它类型缺陷进行研究。
