单行星排式功率分流机电耦合传动方案
2019-02-06赵江灵祖国强苏倩汝
赵江灵,尚 阳,祖国强,苏倩汝
(1.广州汽车集团股份有限公司 汽车工程研究院,广州 511434;2.北京航空航天大学 交通科学与工程学院,北京 100191)
开发混合动力汽车已经成为国内外各汽车公司的当务之急,这也是各整车厂在2025年前的重点开发项目。混合动力机电耦合系统[1-7]的模块化与专用化设计不仅可以使成本降低,同时集成式的控制策略也让整车的动力性和燃油经济性有大幅度的增强。
对于专用混动变速箱(DHT)分串并联和功率分流是两大类别。串并联以本田i-MMD为代表,可以通过增程模式,将发动机的转速和扭矩与整车的需求解耦,让发动机一直工作在经济性最优的工作点,实现较好的经济性。功率分流以丰田THS系统为代表,通过功率分流模式(ECVT模式),让发动机的转速和扭矩与整车的需求解耦,让发动机一直工作在经济性最优的工作点[8-12]。
串并联和功率分流都可以让发动机与整车的需求解耦,让发动机一直工作在最优的工作区间。串并联类的机电耦合系统通过增程模式将发动机的所有能量转化为电能;功率分流类的机电耦合系统,通过功率分流模式,发动机的能量一部分产生电能,一部分直接传递到轮端。因机械传递效率高于电能的转化效率,所以功率分流类的系统效率要高于串并联类的机电耦合系统效率。
功率分流机电耦合系统作为新型的高性能动力传动系统,不仅有利于电机和机械传动高转速发展,而且能够提高功率密度、优化各动力源的工作区域,比其他动力传动结构具有更大的节能潜力和更好的发展前景。
1 功率分流的类型
功率分流机电耦合系统根据分流方式的不同,可以分为输入分流式、输出分流式以及复合分流式[13-16]。
1.1 输入功率分流
1)行星齿轮机构位于传动系统输入端;
2)发动机、发电机、输出轴分别与行星齿轮相连;
3)驱动电机与输出轴以扭矩耦合方式连接。
输入功率分流代表为丰田的THS系统,该类型系统高速模式会产生功率循环,适合低速模式。
1.2 输出功率分流
1)行星齿轮机构位于传动系统输出端;
2)发动机、驱动电机、输出轴分别与行星齿轮机构相连。
输出功率分流的代表为通用VOLTEC-Ⅰ,该类型系统与输入分流式相反,适合高速模式。
1.3 复合功率分流
1)采用两个或多个行星齿轮机构置于传动系统输入端与输出端;
2)发电机、驱动电机分别与行星齿轮机构相连。
复合功率分流的代表为科力远的CHS系统,该类型系统两个机械点之间系统效率高,远离两个机械点系统效率变低。
根据包含动力分流模式的数量,也可以将功率分流系统分为单模系统和双模系统。如丰田的THS系统为单模系统,通用的VOLTEC-Ⅱ为双模系统。
双模系统,多组行星排的组合使系统获得了更大的速比范围以及更多的工作模式,实现了动力性与燃油经济性的提升。结构复杂,控制难度较高,成本较高。
如图1所示,功率分流系统不仅可以实现无级变速,还可以将动力源转速、转矩与车辆负载转矩、车速的解耦,即动力源转速不受车辆负载转矩、车速的约束,让发动机一直在最优的工作点工作。

图1 功率分流对动力源的效率优化
虽然行星排的增加实现了系统速比范围及动力性与燃油经济性的提升,但其复杂的控制策略以及大幅增加的成本同样是亟需解决的问题。表1是各类系统的优缺点对比。E-CVT技术已经较为成熟,在空间占有率、节油率上有一定优势,但其依然存在开发难度大、成本较高的问题。

表1 各类型混合动力机电耦合系统的优缺点对比
2 行星齿轮的连接及效率分析
2.1 行星齿轮的连接关系
行星齿轮机构包含3个构件,分别是太阳轮、行星架、齿圈。机电耦合系统一般也包含两个动力源,即发动机、电机。所以,发动机和电机与行星齿轮机构的连接方式也有多种组合。
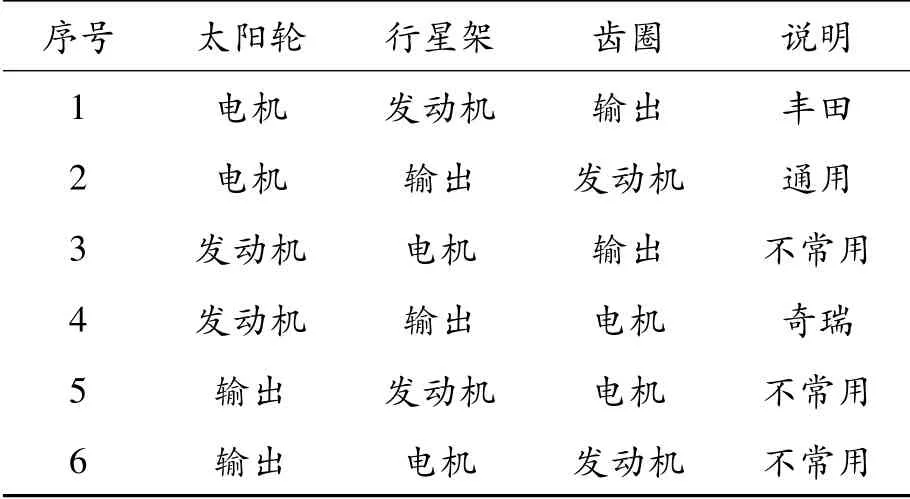
表2 行星齿轮与动力源的连接关系
行星齿轮机构包含3个构件,也可以通过固定某个构件,实现某些功能。行星排的特征参数是指齿圈的齿数与太阳的齿数之比用i0表示,i0的取值范围一般是1.5~6。
2.1.1 太阳轮固定
行星架主动,齿圈被动,行星架到齿圈的速比为:

齿圈主动,行星架被动,齿圈到行星架的速比为:

太阳轮固定,齿圈和行星架2个构件转速方向相同。
2.1.2 行星架固定
太阳轮主动,齿圈被动,太阳轮到齿圈的速比为:

齿圈主动,太阳轮被动,齿圈到太阳轮的速比为:

行星架固定,太阳轮和齿圈2个构件转速方向相反。
2.1.3 内齿圈固定
太阳轮主动,行星架被动,太阳轮到行星架的速比为:
行星架主动,太阳轮被动,行星架到太阳轮的速比为:

内齿圈固定,太阳轮和行星架2个构件转速方向相同。
2.2 行星齿轮的传递效率分析
行星轮式混联系统有3种能量传递方式:
1)直接机械能传递方式,由行星机构将机械能直接传递到轮端。
行星齿轮机构可能是固定某个构件,或者通过离合器,让行星排整体旋转。发动机的动力由行星机构将机械能直接传递到轮端。此时发动机的速比是固定速比。系统的效率为:

按照两级传递,η1、η2为每级齿轮的效率,按照99%计算。
2)直接电能传递方式,该传递不通过电池存储。此时,发电机所发的电量刚好满足驱动电机的需求。系统为功率分流模式(ECVT)或增程模式,发动机带动发电机发电,所发的电直接供给驱动电机使用。此时,系统的效率为两个电机效率的乘积:

式中:ηE1为发电机充电效率;ηE2为驱动电机驱动效率,取88%(含控制器的效率)。
3)缓存电能传递方式,能量通过发电机、电池、驱动电机再到车轮。电池起缓存作用,低负荷发电高负荷使用。系统为功率分流模式(ECVT)或增程模式,此时系统的效率为:

式中:ηE1为发电机充电效率;ηB1为电池充电效率;ηB2为电池放电效率;ηE2为驱动电机驱动效率。ηE1、ηE2取88%(含控制器的效率),ηB1、ηB2取97.5%。
如图2所示,从系统传递效率来分析,方案1的效率最高。但在实际使用中还需考虑发动机的效率。方案1中发动机的速比是固定速比,发动机的动力与轮端需求相关联,发动机的效率为非最优工作点。方案2和方案3属于功率分流模式(ECVT),可以通过电机调节发动机的转速和扭矩让发动机工作在最优工作点。所以,我们需要根据工况实时调整控制策略,让整车的经济性达到最优。

图2 行星齿轮能量传递方式
3 丰田THS构型演变分析
以丰田THS-Ⅰ~THS-Ⅳ为例,分析丰田THS系统的机构特点及系统结构演变原因。如表3所示,丰田THS-Ⅰ~THS-Ⅳ,第1个行星排的连接关系没有变化,一直是发动机连接行星架,发电机连接太阳轮,齿圈输出。丰田THS-Ⅰ~THS-Ⅳ,只是驱动电机的连接关系有变化。
1)THS-Ⅰ/Ⅱ,驱动电机连接行星排的齿圈,驱动电机到轮端的速比为4.113,速比小。所以驱动电机的扭矩需求大,转速低。
2)THS-Ⅲ,驱动电机通过行星排减速(固定行星架),驱动电机到轮端的速比为8.615,提高速比,降低系统对驱动电机的扭矩需求,提高了对最高转速的需求。
3)THS-Ⅳ,驱动电机通过定轴齿轮与中间轴啮合,驱动电机的速比为10,进一步提高速比,降低系统对驱动电机的扭矩需求,提高了对最高转速的需求。
综上所述,THS-Ⅰ~THS-Ⅳ演变的一个重要原因就是提高驱动电机到轮端的速比,减小驱动电机的扭矩,提高驱动电机的转速。因电机的大小与扭矩正相关,所以减小扭矩需求,可以降低电机的尺寸和成本,也可以提高系统的效率。
针对丰田THS-Ⅲ与THS-Ⅳ进行了详细计算,结果如表4所示。
1)从纯电动计算结果可以看出:驱动电机的扭矩由200 N·m降低到163 N·m,差速器输出端的扭矩可以维持在1 600 N·m左右,通过调节驱动电机的速比,对纯电动的动力性无明显影响;
2)从混动模式急加速工况可以看出:驱动电机的扭矩由200 N·m降低到163 N·m,差速器输出端的扭矩可以维持在1 950 N·m左右,通过调节驱动电机的速比,对混动的动力性无明显影响;
3)从混动模式高速工况可以看出:通过调节驱动电机的最高转速,可以弥补因为增加驱动电机速比,带来对最高车速的限制。

表3 丰田THS系统结构特点分析
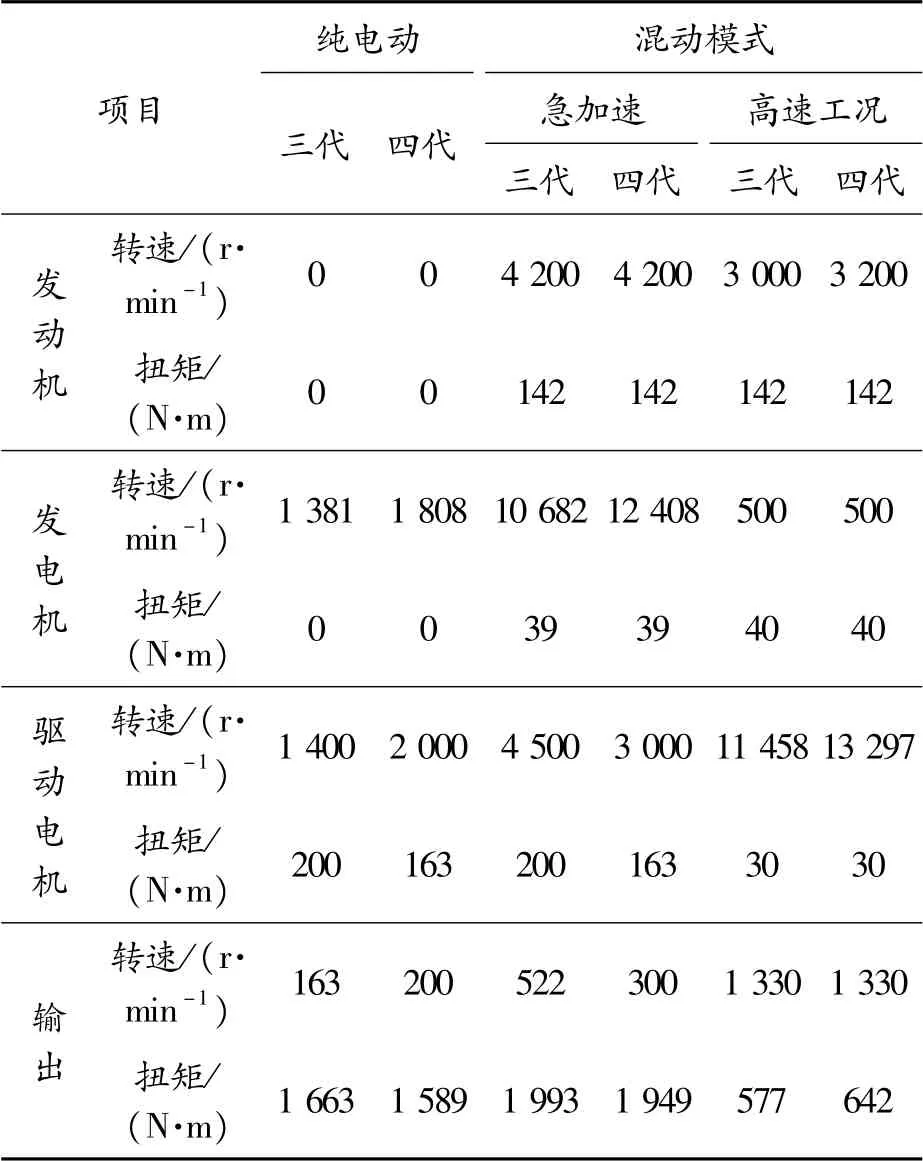
表4 THS-Ⅲ与THS-Ⅳ计算对比
4 功率回流及解决方案
4.1 功率分流的控制方法
功率分流的控制的核心思想是在每一个特定工况满足整车需求的情况下,通过协调发动机与电机的功率输出,达到最大程度上的节能减排。
功率分流混动系统稳态控制就是对发动机目标工作点(转速、转矩)的控制。E-CVT的稳态控制可以实现车辆燃油经济性的提升以及实现车轮对驾驶员操作的响应。图3为发动机目标工作点的确定方法。
混动车辆结构与控制策略比较复杂,因此混动系统参数的匹配与优化是目前研究和开发的重点。
4.2 功率回流问题阐述
丰田的THS系统一直坚持不使用离合器和制动器,结构简单。该系统在Prius的车型上,也取得了较好的节油效果。因无离合器等执行元件,系统工作模式少,只有纯电动模式、功率分流(ECVT)模式和制动能量回收3种模式。
在理想情况下,发动机的动力分两种路径传递:①发动机部分能量带动发电机发电,将电能存储在动力电池中;②发动机部分能量直接驱动车辆。驱动电机则通过动力电池提供的电能驱动车辆。
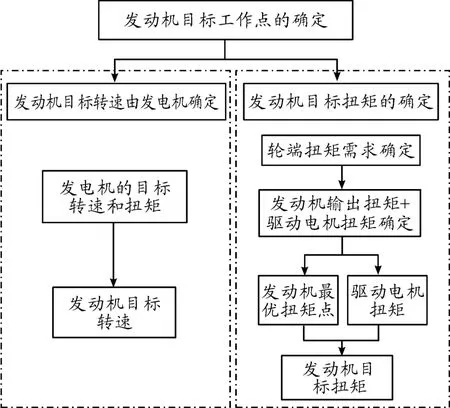
图3 发动机目标工作点的确定方法
当整车功率需求较小时,THS系统的发电机为了平衡发动机的动力,发电机驱动,驱动电机发电,有一部分通过驱动电机发电给发电机平衡发动机的动力,从而形成功率回流。系统的功率回流会降低系统的效率。
功率回流的根本原因是发动机采用功率跟随控制,即轮端的功率主要来源于发动机和电池,一直循环的那部分功率主要是为了行星齿轮系统的平衡。
4.3 规避功率回流的方法
功率回流会降低系统的效率,影响整车的燃油经济性能。一般有以下方法解决功率回流问题。
4.3.1 不改机电耦合系统构型
1)优化行星齿轮特征参数(K值),可以改善回流的工作区间;
2)优化行星机构到差速器输出端速比。
4.3.2 改构型
1)增加行星排(如通用Voltec系统)或使用复合行星排(科力远CHS系统)。如通用Voltec方案所示,通过增加行星排,增加ECVT模式,避免功率回流。
2)增加两挡,降低齿圈转速。如图6所示,丰田基于THS系统,在混动系统后端增加2AT或4AT的方式,增加ECVT模式和发动机直驱模式,提高系统的效率。

图6 丰田LexusGS450h混动方案
5 结束语
全球新能源汽车机电耦合系统存在多种技术方案,如以P0~P4为代表的单电机耦合系统、以本田i-MMD为代表的串并联式机电耦合系统、以丰田THS为代表的功率分流式机电耦合系统、在后驱或四轮驱动平台上应用的纵向布置机电耦合系统,其主要发展趋势为集成化和系统效率最优化。
功率分流类机电耦合系统是重要的发展方向,对行星排的连接方案的分析、能量传递和效率分析有利于开发功率分流类的机电耦合系统。对丰田功率分流系统结构演变原因的分析,有助于更好地了解功率分流类的机电耦合系统。提出丰田功率分流系统存在的问题及解决方案,为开发功率分流系统提供一些思路。
在设计功率分流机电耦合系统时,不仅要考虑发动机、发电机、驱动电机与行星齿轮的连接关系,还需要考虑所组成的系统是否会形成功率回流。通过传动方案设计和参数匹配优化,尽量避免系统功率回流,从而提高系统的效率,改善整车的燃油经济性能。
