协同自适应巡航控制系统跟车算法设计
2019-02-06邓国红宋红松谢川人
邓国红,张 熏,宋红松,谢川人
(重庆理工大学 车辆工程学院,重庆 400054)
自适应巡航(ACC,adaptive cruise control)和协同式自适应巡航(CACC,cooperative adaptive cruise control)是常规巡航控制(CC)的拓展[1]。ACC系统通过测距传感器(如激光雷达、雷达)探测相对前车的空间状态(如相对距离)和空间状态变化率(如相对速度)。通过这些信息,生成合适的节气门或者制动命令以维持与前车的距离。CACC系统则可以看作是ACC系统的延伸和拓展,CACC系统进一步加强了车与车之间的通信(如专用短程通讯[2])和车与设施之间的通信,实现了在跟车过程中既能保证足够的安全距离,又缩短了跟车间距,同时减小了队列中车速波动的目的,对提高交通安全性、减少交通能耗,以及对改善道路通行效率有着重要作用。
近年来对ACC和CACC的多目标优化问题有诸多研究,在城市工况道路上通过变约束预测控制(CC-MPC)和随机模型预测控制(R-MPC)方法,在兼顾安全性和舒适性的同时,有效地提高了车辆的燃油经济性[3];在考虑交通灯等信息的状况下,运用模型预测控制算法来建立CACC系统,以预测前车或整个车队未来的状态,并分别对前方不同的目标采用不同的权值,通过建立代价函数并最小化,得到最优控制输入。在确保安全距离的同时,实现了燃油经济性和乘坐舒适性的多目标优化[4]。
本文基于MPC算法,建立了综合考虑安全性和舒适性的多目标控制协同自适应巡航控制算法,首先建立了带有加速度干扰的车间纵向动力学模型;其次针对MPC鲁棒性不足的弱点,引入状态误差修正项,以此提高CACC系统的鲁棒性;然后通过建立代价函数,并转换为二次型,求解得到最优控制序列,取首个值施加于系统以实现优化目标;最后通过CarSim/Simulink联合仿真分析验证并得出结论。
1 跟车系统建模
协同自适应巡航控制系统设计分为上下层控制:上层控制器控制驾驶行为,根据无线通讯获取到的位置、速度和加速度等信号,计算出自车期望的加速度ades,并将此期望加速度传输到下层控制器;下层控制器控制车辆的机械特性,由上层控制器决策出的加速度ades,通过车辆逆纵向动力学模型计算出油门开度和制动压力。
在上层控制器中,首先需要根据自车和车队的相互纵向运动学特性建立状态空间方程的数学模型:

式中:Δd(t)为自车和前车的间距;vrel(t)为自车和前车的相对速度;v(t)、a(t)、j(t)分别为自车的速度、加速度、加速度变化率。u(t)为系统的上层控制输入ades;ω(t)为系统干扰输入量,即前车加速度。Ts为系统采样时间,Ts=0.05 s;τ为时间常数,τ=0.5。
采用恒定车头时距(CTH)策略的车间时距[5],并规定d0为CTH策略的最小安全距离,d0=7。以间距策略计算出的距离和实际距离的差值δ(t)、相对速度vrel(t)、自车加速度a(t)、自车的加速度变化率j(t)组成输出变量y(t),得到输出方程

2 算法建立
车辆队列采用PID控制器,有较好的迟滞鲁棒性,同时也能对前车速度突变进行快速反应,但跟车时车间误差会出现较大偏差,对安全性有一定的影响。滑模控制策略的收敛速度较快,且前车速度变化对跟车间距的影响较小,稳定性比PID控制器更好,同时能兼顾一定的鲁棒性。LQR控制器下的ACC系统会出现较大的速度变化及较大的加速度,无法对控制目标进行限制,更无法兼顾舒适性与安全性。而鲁棒模型预测控制能够在不同设计约束下优化多个性能指标,可以兼顾跟车误差、燃油经济性、驾驶舒适性等多个指标,而且由于扰动量的加入,能使算法的鲁棒性和队列的稳定性更强。笔者采用基于模型预测控制原理的鲁棒跟车控制算法设计控制器,用于车辆队列的控制。
相较于仅以前车作为跟踪目标的传统ACC系统,本文建立的CACC系统将前车的速度和加速度信息替换为头车的速度和加速度,而跟车距离仍然采用与前车的距离,在保证行车安全的同时,也实现了整个车队与头车的同步性能。
2.1 CACC控制目标分析
行车途中,CACC系统最基本也是最重要的控制目标就是安全性。所以对实际车间距进行严格约束控制,是保证CACC系统安全运行的首要前提,本文使车间距始终不小于最小安全距离:Δd(t)≥d0。
CACC系统对于跟车距离的控制目标,是自车与前车的实际跟车间距趋近于期望跟车间距:δ(t)→0。
CACC系统对于跟车速度的控制目标,是希望自车与头车的实际跟车速度相等,即车辆处于相对静止的状态:vrel(t)→0。
当汽车的加速度和加速度变化率越小,乘客的舒适感就会越高[6]。CACC系统对于舒适性的控制目标,是使行车过程中的加速度以及加速度变化率实现最小:

在MPC中,跟车过程具有动态特性,为了防止跟车过程中出现较大的输入输出波动,即为了保证CACC在跟车模式下的平稳跟车,我们使输出y(t)沿着期望的平缓曲线达到设定值yref,所生成的曲线yref(t)即为参考曲线,沿参考轨迹yref(t),输出方程y(t)中的各个分量将平滑趋近于0,参考曲线用1阶指数形式表示[7]

式中:α为参考轨迹的系数,通常取值在0~1之间。α值越小,参考轨迹相应速度越快,本文取α值为0.9。
2.2 跟车模型预测的鲁棒性设计
实际系统运行时,由于系统内部不确定性,如车辆参数测量误差,参数估计误差,参数时变,模型适配、未建模动态以及外部干扰等[8],导致跟车系统总存在着模型不确定性。不确定性使得基于名义模型的预测轨迹和系统实际运行轨迹存在偏差。由于模型预测控制(MPC)对于模型失配问题的鲁棒性较差,如果模型的不确定性比较显著,那么跟车过程中的实际状态与系统预测状态之间就会存在一个较大的差值,称为预测误差。此时,预测误差增大,则MPC系统不仅不能准确地反映跟车过程中的实际状态和特性,削弱跟踪性能,甚至会丧失系统的多目标优化。
因此,系统的鲁棒性必须得到提高,以加强系统对外部干扰的抵抗能力和系统对模型误差的修正能力。通过反馈校正法,将车辆跟车状态误差作为修正项表示实际检测到的状态向量与预测值的误差。由此建立如下的MPC鲁棒控制算法:

其中H为误差反馈矩阵。
设定预测时域为p,控制时域为m,可得如下预测状态:
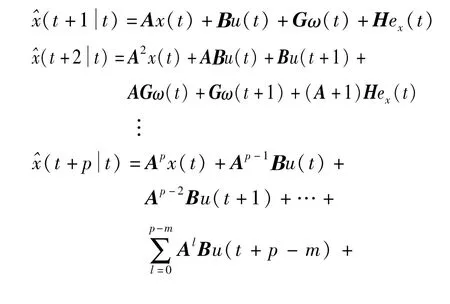

进一步,由输出方程(式(2))可以预测t+1至t+p步的被控输出。

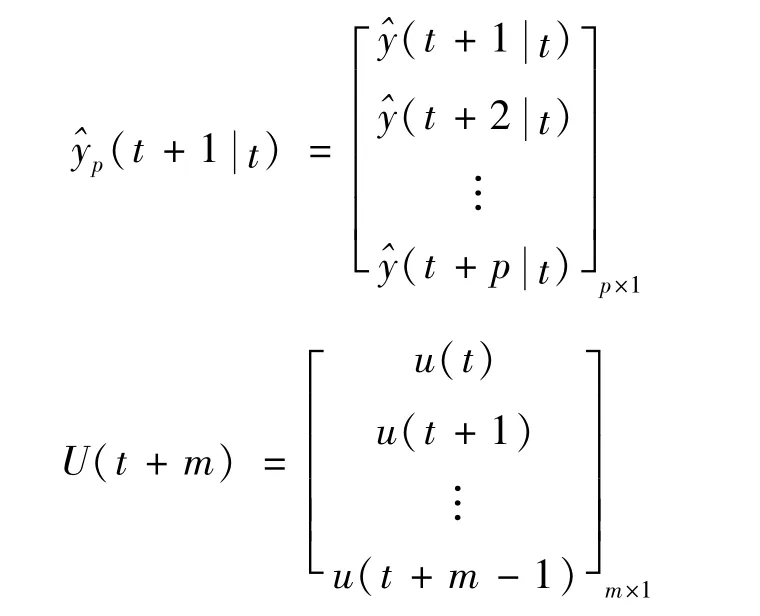
定义p步预测输出向量和m步输入向量:
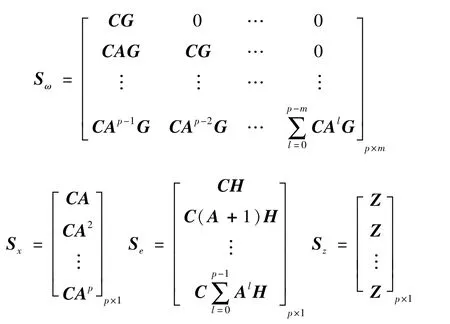
对于系统未来p步预测的输出可以简化为如下预测方程

其中

2.3 约束优化问题
对控制系统性能的要求主要体现在目标函数的选取上[7],通过约束控制动作,使被控输出接近参考输出是本文的最终目的。将CACC系统行驶过程中选择优化的性能指标以加权形式的值函数写出,即选取的目标函数为:
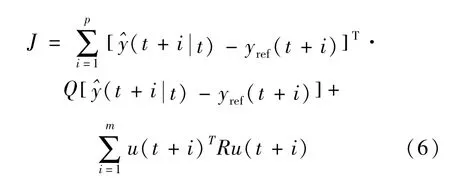
整个表达式的功能是使系统尽快且平稳地跟踪上期望轨迹。式(6)中,Q分别为预测控制输出与参考输入的对车间距、相对速度、加速度、加速度变化率之间偏差的加权系数矩阵,希望控制动作变化不要太大,本文综合考虑舒适性与安全性,Q最后结果的相同权值为1,加权因子越大,表明期望对应的控制输出越接近给定的参考输入;R为控制输出的加权系数矩阵;第1项表示控制系统对参考状态的跟随能力,第2项表示为控制输入,控制加权因子R越大,表明期望对应的控制动作变化越小,R的选取影响控制量,随着控制指标对控制消耗能量重视程度降低,相应控制器控制下的系统控制能力跟踪增强,同时车辆加速度的增幅也会增加。
为了满足跟车过程中的最优控制性能,根据车辆的实际性能,对控制输入量进行约束限制:

2.4 约束优化问题求解
由简单的数学变换,本文将带约束的模型预测控制优化问题(式(6)(7))转化为二次型问题进行求解,得到:
其中

由此,在每个采样周期内,可以得到在控制时域m内的最优控制输入序列:

然后把控制序列的第1个元素输出至下层控制器中。
下层控制器采用逆纵向动力学模型[9]。考虑到车辆相应部件的可靠性和乘坐的舒适性,防止在加速和制动之间进行过于频繁切换带来的车辆抖动,在切换逻辑曲线上下两侧设置一个过渡区域,其宽度设置为0.2 m/s2[10]。
3 仿真分析
为了验证本文提出的协同自适应巡航控制算法,采用Matlab/CarSim进行联合仿真。仿真车型全部调用CarSim软件中的B级掀背车,前轮驱动,发动机功率为200 kW。车辆参数均保留默认设置,只对车速进行限制和调节。在CarSim中设置4个车组成的车队,每个车之间的初始间距为30 m。
3.1 匀速跟车工况
在此工况下,设置头车在前10 s保持60 km/h匀速行驶,然后在10~15 s内加速到80 km/h,15~20 s内减速回60 km/h,接下来10 s重复上一个10 s内的加减速过程。跟随车辆的初始速度设置为60 km/h。
仿真结果如图1~3所示。

图1 匀速跟车工况车间距与时间关系

图2 匀速跟车工况车速与时间关系
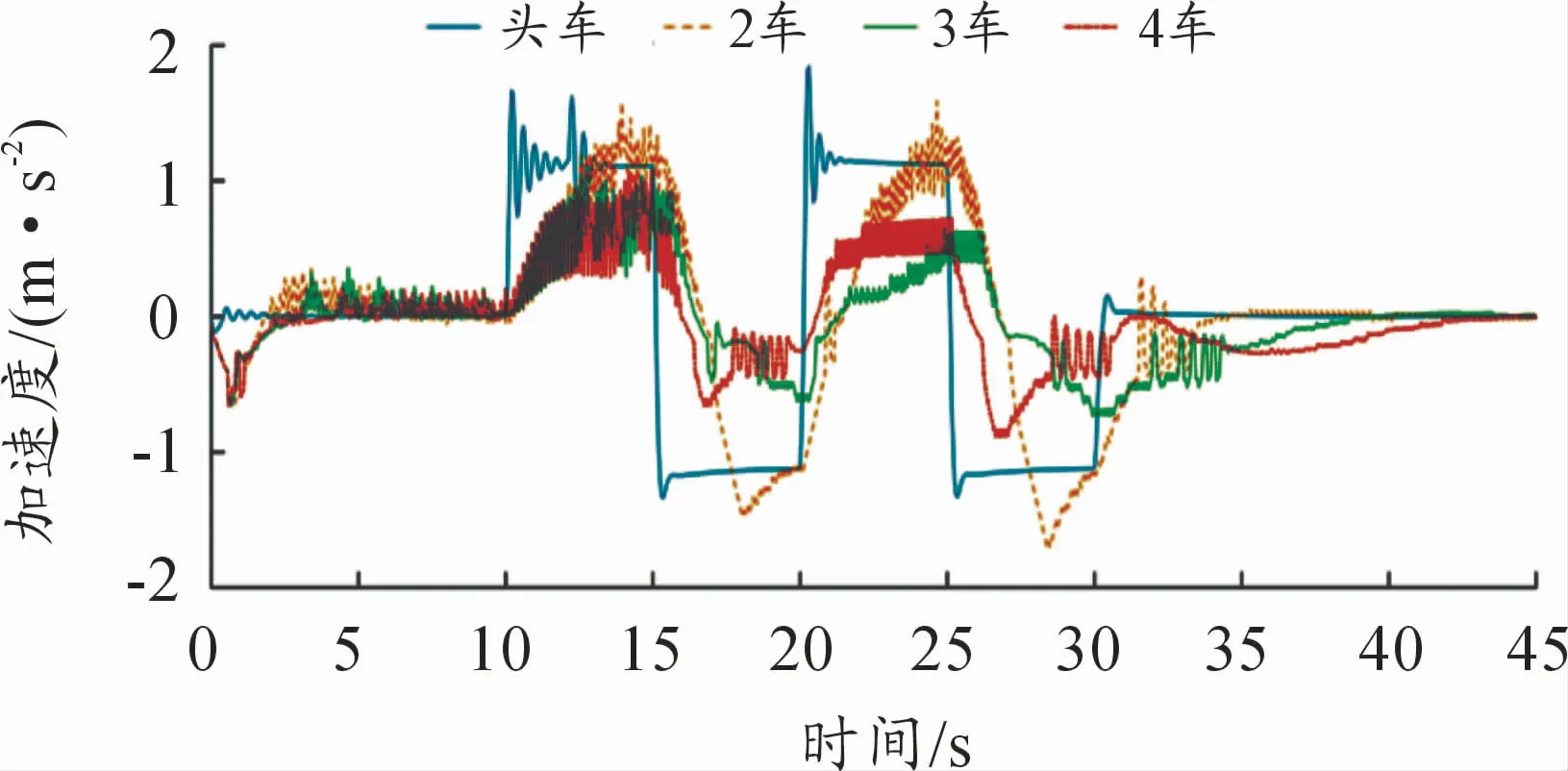
图3 匀速跟车工况加速度与时间关系
从图1和图2可以看出,在CACC系统中,后车能紧密地跟随前车速度的变化,同时又有着足够的安全距离,既保证了安全性,又提高了稳定性和效率性;再由图3可以看出,当头车速发生变化时,队列中后车的加速度变化比头车更为平缓,保证了跟车时乘客的舒适性。
3.2 紧急刹车工况
在此工况下,设置头车在0~10 s内以60 km/h的速度行驶,跟随车辆的初始速度也为60 km/h,到10~15 s的时间内头车速度降为0 km/h,仿真时间设置为25 s。仿真结果如图4~6所示。

图4 紧急刹车工况车间距与时间关系

图5 紧急刹车工况速度与时间关系
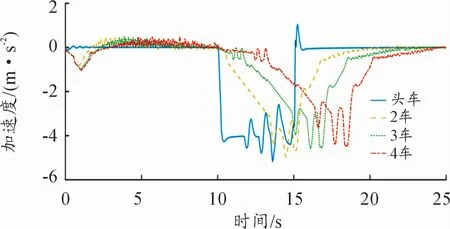
图6 紧急刹车工况加速度与时间关系
从图4、5中可以看出,车辆的间距相差不大,始终维持在系统安全范围内,速度变化较前车变化更为平缓。从图6可以看出,各个车的加速度峰值均比头车加速度峰值小,而且加速度变化更为平缓,过大的加速度以及加速度变化率都会引起车内乘客的不舒适感。MPC控制器能在前车紧急刹车的情况下,保持足够的安全距离的同时减小跟随车辆的加速度和加速度变化率,在安全性和舒适性上都得到了保障。
4 结论
基于MPC控制原理,设计了具有鲁棒性的协同自适应巡航控制系统,得到如下结论:
1)建立了带有头车加速度干扰的纵向动力学模型,该模型在头车速度变化时,能快速地跟随头车的速度,比传统ACC系统反应更快,能有效避免由前车速度变化而产生的道路潮汐现象。
2)从跟车过程中的舒适性和安全性的角度出发,建立了带有误差修正项的模型预测控制算法,提高了控制系统的鲁棒性,并将约束优化问题转化为二次型,得到优化后的最优控制序列。
3)从仿真结果来看,基于MPC算法的CACC系统能在不同的工况下实现车辆跟随,并在达到协同自适应巡航控制系统要求的同时,保证跟车过程中的安全性和舒适性。
