聪明的机器人画家
2019-02-06巩文玉
鄂 鑠 巩文玉
山东省威海文登新一中 山东 威海 264400
一、背景
在当今照相技术十分发达的今天,仍然有不少人热衷于街头画像,因为艺术家擅长抓住人物的面部表情,让画像化繁为简,绘制出形似而且神似的肖像素描,别有一番韵味。然而,随着成本的上升,街头肖像画家越来越少,许多喜欢肖像素描的人,也难以找到街头的肖像画家给他们画像了,所以,它也就因此应运而生,不仅减少肖像素描的成本,而且让那些对于街头绘画已经意兴阑珊、审美疲劳的人们眼前一亮,把它运用到人们的艺术活动中,使街头绘画重新焕发生机。
另外,它也可用于日常生活中进行娱乐示范作用,或者运用一些App进行遥控,让它进行操作绘画。并且它具有自己的面板和擦拭面板的部分,也可以一定程度上节约纸张。
二、创作过程总述
本设计的主要设计制作过程包括:创意构思、整体设计、零件细化设计、控制系统设计、控制程序代码编写、控制系统调试等六大部分。如图2-1所示。
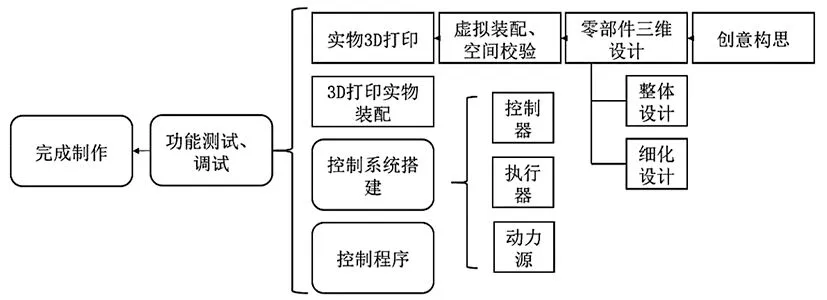
图2 -1 设计制作过程简图
本设计的整体设计:整个机器人以白板为结构基体,传动方式为皮带传动,动力源为两相四线步进电机,arduino nano控制板为核心的控制系统,步进电机驱动器为L298 N电机驱动器。整个机器人的绘画尺寸为200×300毫米,可以支持马克笔、铅笔、钢笔、圆珠笔等书写工具。
2.1 零部件三维建模及打印 所有零件的设计过程均为先在creo三维设计软件中建模、虚拟装配校验空间远动关系,然后再导出处STL文件,使用3D打印机进行实体制造打印,最后将各零件进行组装。
(1)两相四线42步进电机模型(用于装配校验)主要建模:

图2 -2 步进电机模型
建模参数:长方体长42.8 mm宽40 mm高39.5 mm。
(2)皮带轮的三维建模:
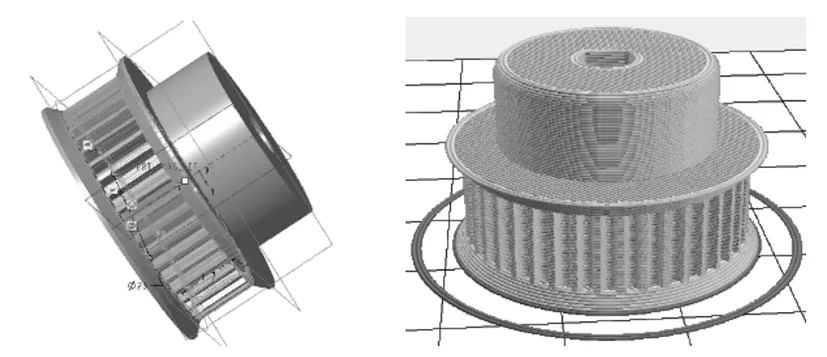
图2 -3 皮带轮三维模型
绘制圆形,直径23.8 mm,高度10.3 mm。锯齿主要用于卡柱皮带用36个齿。
(3)轴端固定架建模:
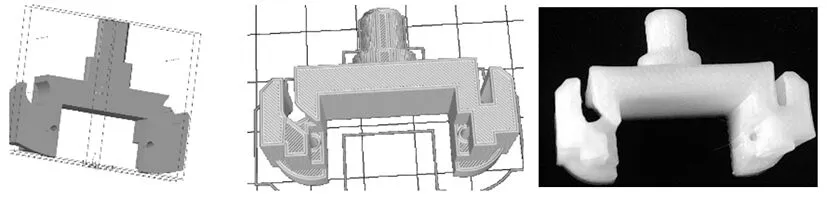
图2 -4 轴端固定架三维模型
长22.7 mm,宽15.8 mm,高12 mm。
(4)皮带轮轴承套圈建模:

图2 -5 皮带轮轴承套圈三维模型
(5)笔架建模:

图2 -6 笔架三维模型
(6)皮带卡扣建模:
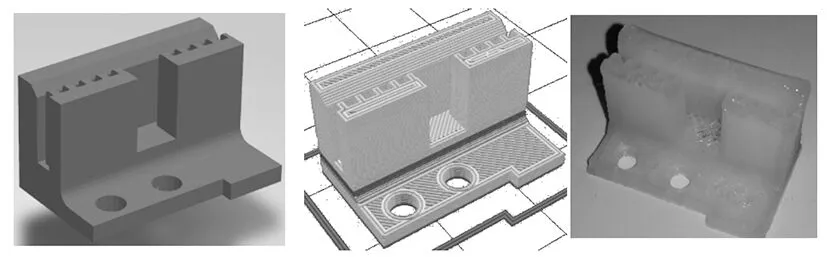
图2 -7 皮带卡扣三维模型
(7)白板擦底座建模:

图2 -8 板擦三维模型
(8)X轴滑轮建模:
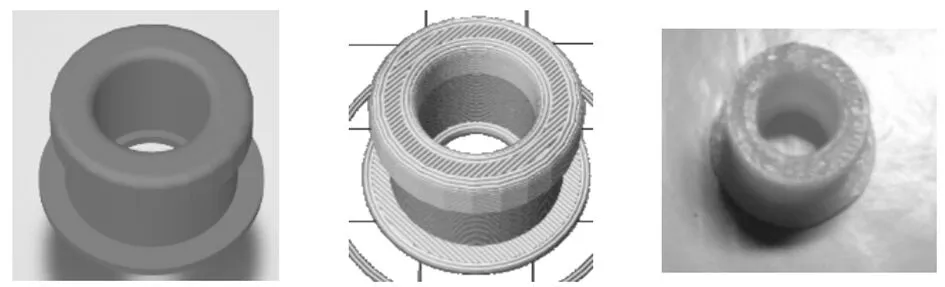
图2 -9 板擦三维模型
(9)X轴角接块建模:

图2 -10 X轴角接块三维模型
(10)右上角支架建模:
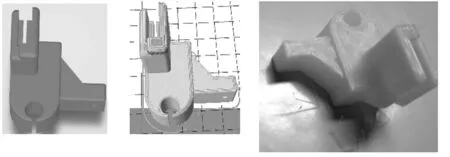
图2 -11 右上角支架三维模型
(11)左上脚支架建模:

图2 -12 左上角支架三维模型
(12)X轴电机支架建模:
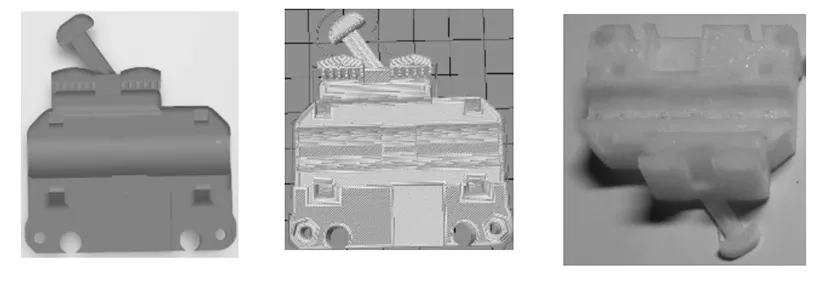
图2 -13 X轴电机支架三维模型
最后将各部分零件组转起来,得到机器人实物,如图:
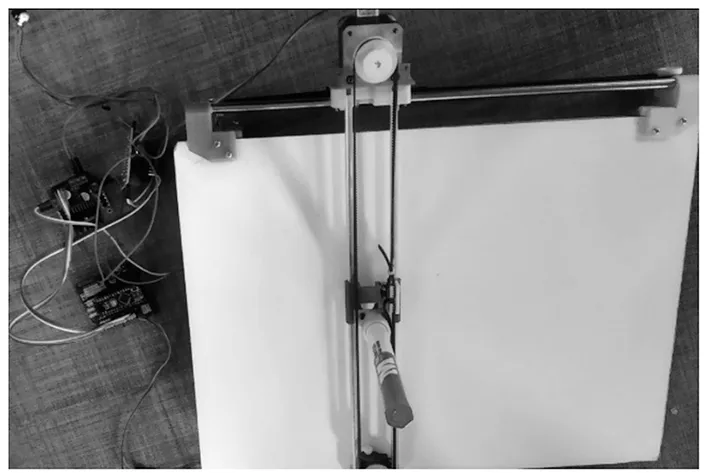
图2 -14 整体装配图
2.2 控制系统原理展示
控制电路图
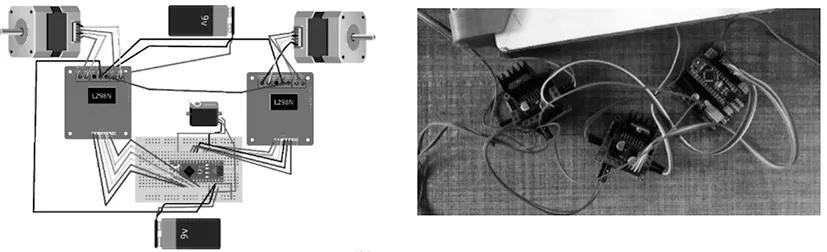
图2 -15 控制电路图
如上图所示,控制芯片接收到电脑的数字信号,并将控制信号发出到步进电机驱动板,驱动板将信号放大,由步进电机完成动作执行,舵机的主要作用是实现提笔动作。
三、结论
通过进行编程后的调试与测试,初步完成了与其所想要达到的效果。可以进行绘画的操作,这表明它可以在人为的操控下进行绘画运动。
