基于超声波测距的汽车倒车防撞报警系统设计
2019-02-04王虎杨启正李约朋
王虎 杨启正 李约朋
湖南交通工程学院 湖南省衡阳市 421009
1 引言
随着我国经济的高速发展,汽车的数量大幅增加,交通运输业日益兴旺,但交通事故也日趋严重,造成了大量人员伤亡与经济损失,因此汽车安全驾驶系统的研究成为当下汽车企业关注的焦点,其中汽车倒车雷达系统的研究与开发更为迫切。目前市场上汽车倒车雷达系统种类较多,但大多价格昂贵,因此设计一种性价比较高的倒车防撞报警系统非常迫切和重要。本文以AT89S51单片机作为控制器,采用超声波测距的原理,设计了一种整体结构简单、性价比合理、可靠性较高的汽车倒车防撞报警系统。本系统采用模块化设计,具有较高的灵活性和扩展性,主要由微控制器模块、超声波测距模块、声光报警模块、液晶显示器模块等构成。
2 汽车倒车防撞报警系统整体设计
本文设计了一种以AT89S51单片机作为控制器,超声波传感器作为测量元件的汽车倒车防撞报警系统。当驾驶员将汽车档位切换到倒车档时,倒车防撞报警系统也同时开启。本系统能够精确测量汽车尾部与障碍物的距离,并将测量的距离在LCD上进行实时显示;当汽车尾部与障碍物的距离小于设定的危险距离时,声光报警系统将启动,提高安全性。为了提高超声波测距的精度,本系统在基本电路的基础上加入了温度补偿电路。系统整体结构框图如图1所示。
3 系统部分硬件电路设计
3.1 微控制器模块电路设计
单片机最小系统如图2所示。
3.2 超声波测距模块电路设计
超声波指的是超过人类听觉所能分别的最大频率20KHz及以上的声波。利用超声波进行测距的方法主要有渡越时间测量法、相位测量法及声波幅值检测法等。本系统采用结构简单、测量精度较高、测量稳定性好及测量范围较广的渡越时间检测法。该测量方法相对于声波幅值检测法受外部环境的影响较小,相对于相位检测法测量范围较广。超声波渡越时间检测法的实现过程:首先由单片机控制系统产生矩形脉冲信号时开始计数,同时超声波发射器产生超声波,当声波遇到障碍物时会发生反射,再通过超声波接收器接收,当微控制器接收到回波信号时停止计数。汽车与障碍物的距离计算公式如下:
式中:D-测量距离;V-声波的传播速度;△t-超声波往返的时间;N-微控制器计数的脉冲数量;T0-单片机的机器周期。
超声波测距模块主要由超声波发送电路和超声波接收电路两部分构成。超声波发射模块电路的超声波探头选用CSB40T,利用LM555及外围电路构成多谐振荡器电路,通过调节电阻Rp的阻值,使振荡频率与超声波探头的固有频率(40KHz)保持一致,由LM555第3脚输出端驱动CSB40T,从而使超声波探头发射超声波信号。超声波发射模块电路如图3所示。
超声波接收模块电路主要是用于超声波回波信号的接收与处理,为了保证回波信号的正常接收,本系统选用与发射探头对应型号的接收探头CSB40R和红外线/超声波接收专用芯片CX20106A等构成超声波接收电路。超声波接收模块电路如图4所示。
4 系统软件设计
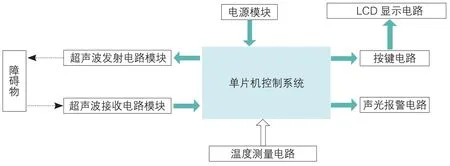
图1 汽车倒车防撞报警系统结构框图
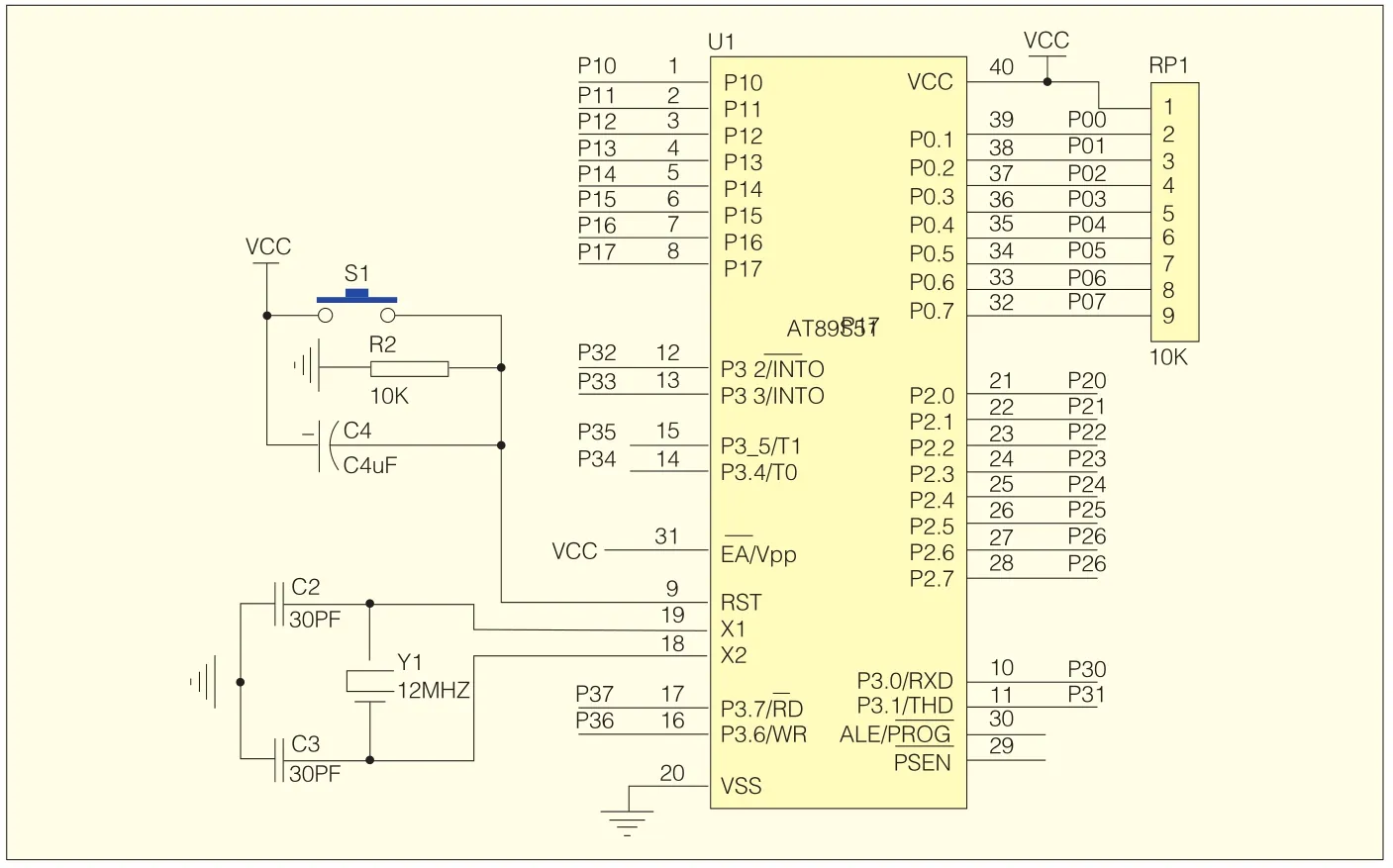
图2 单片机最小系统

图3 超声波发射模块电路
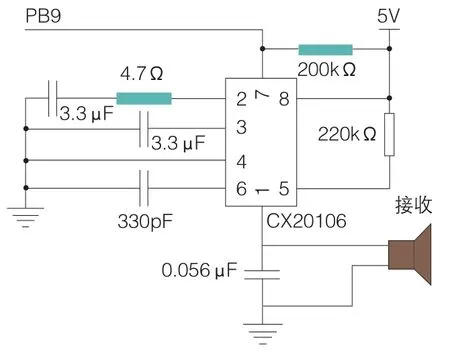
图4 超声波接收模块电路图
汽车倒车防撞报警系统软件设计部分主要由:主程序、超声波信号发射子程序、回波信号接收中断子程序、环境温度测量子程序、测量距离修正子程序、LCD显示子程序、声光报警子程序等构成。本系统工作流程:当驾驶员切换到倒车档时,汽车倒车防撞报警系统启动,系统进行初始化处理;然后超声波探头开始发射超声波,单片机的内部定时计数器开始计数,当超声波接收探头接收到回波信号时,定时计数器停止计数并且开外部中断;温度传感器实时检测外部环境温度,并根据测量得到的温度确定对应的声波传播速度,通过超声波测距公式可计算出汽车与障碍物的距离;当汽车与障碍物的距离小于设定的危险距离时,声光报警器启动。主程序流程图如图5所示。
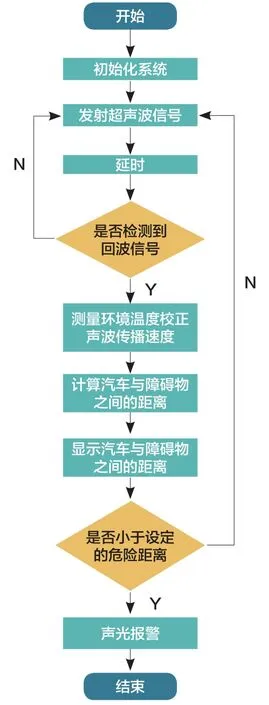
图5 主程序流程图
5 结束语
本系统采用AT89S51单片机作为微控制器,结合超声波测距,设计出了一种结构简单、性能稳定、测量精度较高的汽车倒车防撞报警系统。该系统能够实时显示汽车与障碍物之间的距离,并且增加了温度补偿电路,提高了测量精度,当测量距离小于设定的报警距离时启动声光报警。通过对本系统进行仿真测试,达到了预期目标。
