射线探伤用管道爬行器介绍及经验总结
2019-01-30杨杰顾叶涛
杨杰 顾叶涛

摘 要:该文简述了爬行器在实际检测过程中的应用,并对几种不同接收方式的爬行器在使用过程中出现的问题进行分析比较,结合现场工作情况选择相对可靠的爬行器检测仪;对定位方式、电池、轮毂等关键部件的选择进行分析总结,结合以往检测时对定位影响的困素进行参考,在后续工作中可选择可靠性高的定位方式,保证爬行器的稳定工作;简述现有胶片系统的局限性,利用现有CR技术研发新的检测设备用以提高工作效率。
关键词:爬行器 定位 接收方式
中图分类号:TH878 文献标识码:A 文章编号:1672-3791(2019)11(b)-0027-04
Abstract: The application of the crawler in the actual detection process, and the analysis and comparison of the problems in the use of several different receiving methods of the crawler.It combined with the field work and select a relatively reliable crawler detector. The selection of key components such as positioning method, battery, and hub is analyzed, and the reference to the influence of positioning in the past detection is used for reference. In the subsequent work, a highly reliable positioning mode can be selected to ensure stable operation of the crawler. Briefly describe the limitations of existing film systems and use existing CR technology to develop new inspection equipment to increase work efficiency.
Key Words: Crawler; Location; Receiving mode
在长输管道施工过程中,无损检测是保证焊接质量的主要保证手段之一。由于利用X射线管道爬行器进行中、大口径射线检测,效率高、成本低、中心曝光质量好等原因,目前已被广泛采用。但爬行器在检测过程中存在的大角度爬坡能力有限,转弯半径大,定位偏差,爬行器管道内故障救援难等局限性。因此对以下几种不同型号的爬行器进行介绍与分析,通过采取一些有针对性的工艺措施和施工方法,更好地选择与实际相符的爬行器。
1 爬行器简介
射线探伤用管道爬行器,是采用将X射线探伤机,安装于带驱动爬行的小车上,通过无线控制的方式,驱动并定位于待检管道内部的一种装置。
大部分爬行器包含以下结构:X射线机、带驱动爬车、定位装置、接收装置、救护车。其各结构作用如下。
(1)X射线机:发出X射线;
(2)爬车:带动X射线机前进;
(3)定位装置:检测位置的确定;
(4)接收装置:接收来自定位器控制爬车前进后退以及放出射线的信号;
(5)救护车:在爬行器在行进过程中出现信号混乱及翻车的情况时起救援作用。
各类爬行器装置及结构示意图见图1~图3。
2 不同类型爬行器优缺点分析
2.1 爬行器分类
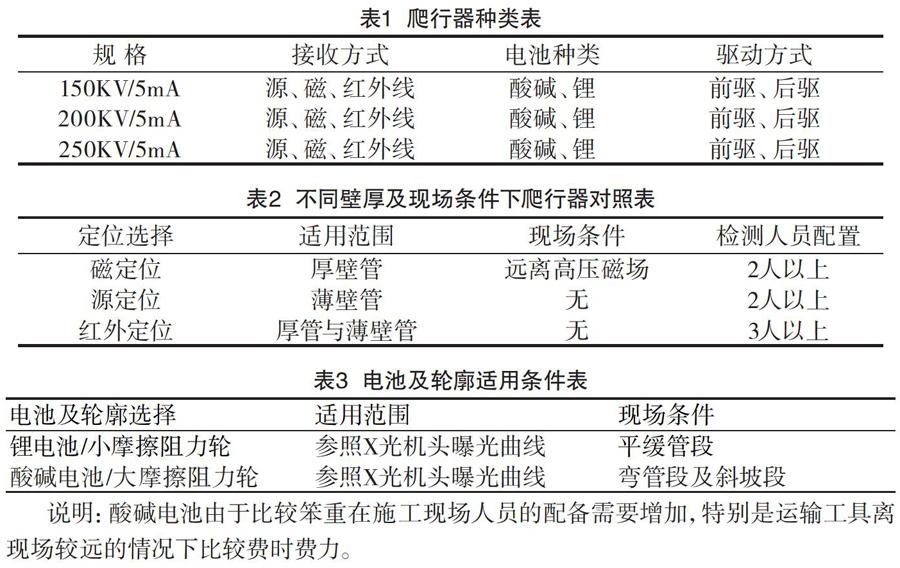
现在国内爬行器种类繁多,如表1所示。不同类型的爬行器在现场使用过程中存在各自的优缺点。
2.2 爬行器定位方式
(1)源定位:由于源定位(伽玛射线)具有极强穿透力,它作为指令可以穿透金属管壁被接收器接收,从而实现对爬行器的整体控制。源定位爬行器优点是不受干扰,定位准确,配备人员相对较少,检测速度快等,但伽玛射线对人体和环境有害所以现在很少使用。
(2)磁定位:磁信号作为指令实现对爬行器的整体控制。有效避免了伽玛射线对操作人员的伤害,是现在应用较多的一种爬行器,配备人员相对较少,检测速度快等,但是磁信号的穿透力相对来说比较有限,而且在有高压电线塔、磁场较大的地方、焊接过程中爬车从下面过的时候会使接收信号错乱,会导致爬车无法正常运行。
(3)红外线定位:红外线信号作为指令实现对爬行器的整体控制。定位准确,管壁厚度没有影响,而且在有高压电线塔、磁场较大的地方、焊接过程中爬车从下面过的时候都不会使接收信号错乱而导致爬车无法正常运行。而且还能直观观察到焊缝,是现在常用的爬行器之一。但是配备人员相对较多,检测速度相比源定位与磁定位慢,而且必须在管口放置控制器,如果管线有连续S型弯道还会出现信号接收不好,画面模糊,信号线在爬车机上没有得到很好的保护,导致信号线容易损坏。
2.3 电池选择及爬坡辅助
除了接收信号上的优越性能外,还要从电池选择上区别爬行器的优越性。
现在爬行器有酸碱电池与锂电池两种类型,酸碱电池比較重,锂电池比较轻,都有各自的优缺点,管道爬行器的爬坡能力有限,目前大多数爬行器的爬坡能力都在20°左右,但是在实际过程中长输管线都是多变的地形,酸碱电池的爬行器轮毂抓地能力大,能适合爬度大一些的管线和小角度弯道,但是在运输过程中往往比较费力。锂电池爬行器重量轻适合平缓的管线,人员运输过程比较省力,但是爬坡角度小,过弯角度大。
其次利用爬行器自身的爬坡能力是不可能时,只有采取外力帮助爬行器爬坡的办法,其具体的做法如下。
(1)爬行器的控制部分进行简单改造,把其中的自动行走部分断开,使之完全自由运动,但不影响指令源的声控指令。
(2)采用小型卷扬机和足够长的细钢缆连接爬行器的尾部(目前市面上很长见的越野车自救绞盘系统稍加改造即可)。
(3)利用爬行器的自重和坡度使爬行器下行,并使用卷扬机控制其下滑速度。
(4)定位采用两级定位,即:在快要到达预定定位点时提前使用指令源预警,并降低下滑速度,再在准确定位点停止爬行器,进行曝光。
(5)在接近垂直的角度,可在爬行器机头的中间部分加装星形弹性定位轮,以使机头准确定位于管道中心。
2.4 爬行器轮毂选择
轮毂有锥型轮毂与圆形轮毂,锥型轮毂与管子曲域面结合严密、面积大、爬行破度大,而且在行进过程中不会导致跑偏和侧翻。但是锥型轮毂磨损快而且加工成本较高,不易加工,往往备件要多出很多。圆形轮毂在行进过程中容易侧翻,特别是过弯道的时候容易卡住,所以圆形轮毂只适合平缓的直管道,但是圆形轮毂容易购买,易于加工,更换也比较方便。
2.5 精准定位措施
爬行器的定位原理:源定位-射线源装入铅屏蔽内,底部留一小孔可以开关,放置在管外壁,射线源穿透工件,爬行器上使用接收器接收来自管子表面穿透过来的射线,并根据接收器发出的声音频率控制爬行器的前进、后退及曝光参数;磁定位于源定位原理一样,区别在于磁定位定位器是靠电磁铁发出信号,而源是靠射线发出信号;红外线定位信号发出和接收需要把控制器放置在管口位置,红外线信号传输在显示屏上的方式体现。
在X射线管道爬行器施工过程中,由于爬行器自重较大、惯性较大,因此,在实际工作时其定位并不十分精确。对于大口径厚壁管道而言,由于射線机辐射场足够宽,一般影响不大,还不容易见到白边;但有时也多见到由于辐射场偏斜太大而造成的内外表面焊缝边缘影像错位严重,甚至有可能影响到纵向裂纹的检出。而对于小口径的管道则容易造成白边,甚至白片。
因此,精确定位对于成片率及缺陷的检出至关重要,为保证定位准确,可采取以下针对措施。
(1)针对不同的管线内表面状况,更换不同摩擦阻力的爬车主动轮。
(2)适当降低爬器行走速度,以降低其惯性。
(3)改造爬行器停车定位程序,因为降低爬器行走速度将带来效率降低的问题,尤其是大口径长输管道,其单管长度较长长,曝光时间也较长,有时仅仅等爬器返回就需要两个多小时;因此在采用高速爬行时,采取将指令源接受器前移,使爬行器接收器在接受到定位信号后先减速到很慢,然后延时停车定位的做法。这样可以做到极高的定位精度。
3 管道爬行器的应用及经验总结
3.1 定位方式选择的人员配置
定位选择对检测人员配置上有一定要求,如果选择磁定位或者源定位,人员配置可以需要的少,因为2个人在布置胶片的同时可以指令爬行器跟随人员往前爬行。
磁定位还存在焊接干扰问题:在现场工作中磁定位爬行器在管道内向前爬行,突然爬行器发出故障声音,用定位器找到后消除故障。没过多久还是发出同样的故障音,观察一段时间发现,焊接人员点焊的一瞬间爬行器就会发出故障报警,在后续的工作中还出现指令混乱,爬行器不接受指令等故障,所以在选择磁定位时不能在施焊的管道上作业。
红外定位则需要多配备一名检测人员在管口指令爬行器,还需要配备通信设备方便布片人员与爬行器操作人员沟通,防止人员误照射风险。
红外定位还存在信号上的不稳定性,在西气东送项目上,管道比较长并且还有一定的S型弯道,在操作爬行器,控制器屏幕上突然出现雪花条纹不断滚动,导致爬行距离及焊口无法准确识别,因为管道上无焊接作业,所以排除施工干扰,关闭控制器电源一段时间,问题还是同样存在,不停检查控制器并观察屏幕,在手触到控制器天线的时候屏幕稍微有点变化,所以应该是信号上出现问题,这时候抬起控制器放入管口位置的管道把天线靠近管壁,屏幕出现的问题解决。
同一种型号的X射线管道爬行器一般是对应单一的定位,如果磁定位想改为其他定位,必须返回厂家改变其定位模块。不同定位适用的管道壁厚及现场条件见表2。
3.2 电池及轮毂的选择建议
电池及轮毂需要根据现场环境进行选择,在原油管线检测过程中,管线有一定的弯道,爬行器是圆形轮毂,接触面积比较小,配锂电池,在过弯的时候爬行器出现翻车,还有一次是爬行器在平缓段不往前走,当进入管道查看的时候发现管壁上有冰存在,爬行器在空转。第二天换上另外一种型号的爬行器:锥形轮毂加酸碱电池,打滑、空转、翻车的情况都没有再出现。同型号的X管道爬行器一般配备不同管径的轴,在检测不同管径时可以把轮廓轴加长或换短,以便爬行器能把X射线机架到合适的位置;同类型爬行器可以选择相同参数锂电池或酸碱电池;电池及轮廓适用条件见表3。
3.3 未来射线爬行器的发展
现如今的射线检验多用胶片系统检测,存在检测结果效率较慢,灵敏度受影响因素较多。在未来射线检测的发展中,X射线计算机辅助成像检测(CR技术)会作为主要检测方法之一。使用CR技术检测可以得到稳定的图像文件,配合预写分析程序软件的终端计算机,可以将现场所检焊缝的评价结果生成初步报告,供检测人员评定缺陷进行参考。使用X射线爬行器配合CR技术组成的检测系统,能大幅提高批量工件或连续检测时的工作效率。
4 结语
不同类型的管道爬行器在检测过程中的局限性给目前的长输管道检测带来了一些不便,使得管道爬行器不能在所有的长输管道上发挥它的长处和优点,因此通过一些实践分析出不同爬行器的各自优越性,扩展了爬行器在实践过程中的选用范围,提高了工作效率。希望能在实际检测工作中需要用到爬行器的同行提供一个参考,并结合自身的检测环境选择合适的爬行器检测仪。以上是笔者对目前主流射线检测管道爬行器在工程应参考用方面的总结,希望能够为后续使用管道爬行器射线项目提供参考。
参考文献
[1] NB/T 47013.2-2015,承压设备无损检测,第2部分:射线检测[S].
[2] 中国特种设备检验协会编.射线检测[M].北京:中国劳动社会保障出版社,2007.
[3] 中国特种设备检验协会编.承压类特种设备无损检测相关知识[M].北京:中国劳动社会保障出版社,2016.
