基于单片机的智能语音小车控制系统设计
2019-01-30田亚立梁波
文/田亚立 梁波
语音识别技术目前是相当重要的人机接口技术。采用语音识别作为人机交换技术具有快捷、实用等显著优点。伴随着工业自动化技术及汽车工业自动化的迅猛发展,研究智能小车也逐渐受到大家的关注。微电子技术的快速发展为人们的生活提供了诸多便利,尤其是51单片机、ARM、DSP等微型计算机的发展快速的推动着科技的发展。将单片机等微型计算机的控制功能与传感器检测技术、语音识别技术等有机结合,已经成为智能化不可缺少的部分。小车的语音识别、自动寻迹、红外避障等技术,不仅可以在智能儿童玩具中应用,还可以应用在无人驾驶、工厂自动化 、服务机器人等诸多领域。本设计是一种以晶宏公司的STC89C52单片机为控制器,将语音识别与、自主寻迹及避障功能有机结合,有一定的实际应用价值。
1 系统整体设计方案
本设计采用STC89C52单片机作为主控芯片,通过LD3320语音模快识别语音信号,单片机采集语音模块的信号,将信号处理后送电机驱动模块,驱动小车运行。小车行驶的状态有:前进、后退、左转、右转和停车。当小车在行驶过程中遇到障碍物,红外避障检测模块检测周围障碍物,小车自动停止或转向。利用红外光电传感器检测黑色轨迹。小车的行驶状态通过LCD1602液晶显示出来。
随着我国的发展进入全新时代,政治参与也逐渐被赋予了更深的意义,只有充分了解政治参与理论,积极参与政治生活,提出自己的意见和建议,才能不断推动我国政治的发展,提升我国的国际竞争力。
本智能小车系统由单片机控制模块、语音控制模块、避障模块、自动循迹模块、电机驱动模块及液晶显示模块等组成。系统图如图1所示。
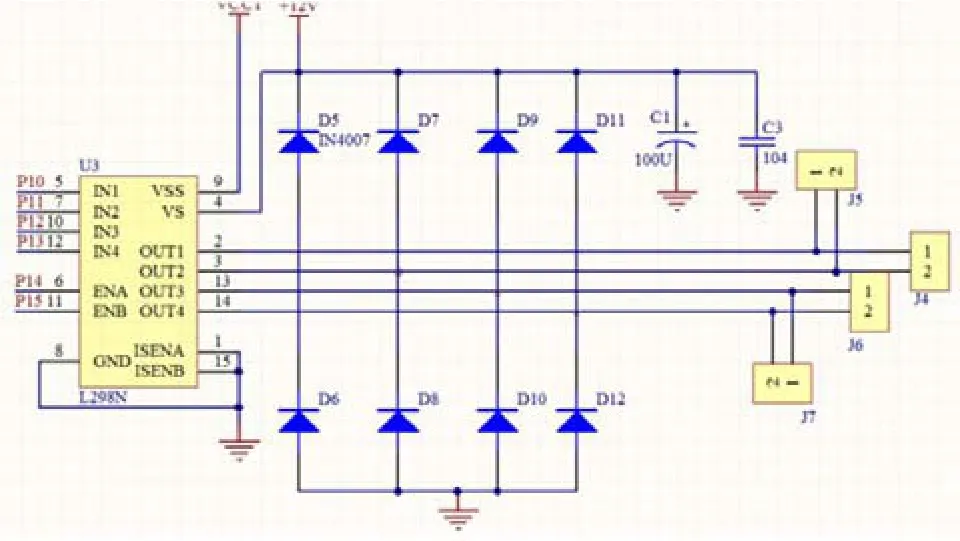
图2:电机驱动模块原理图
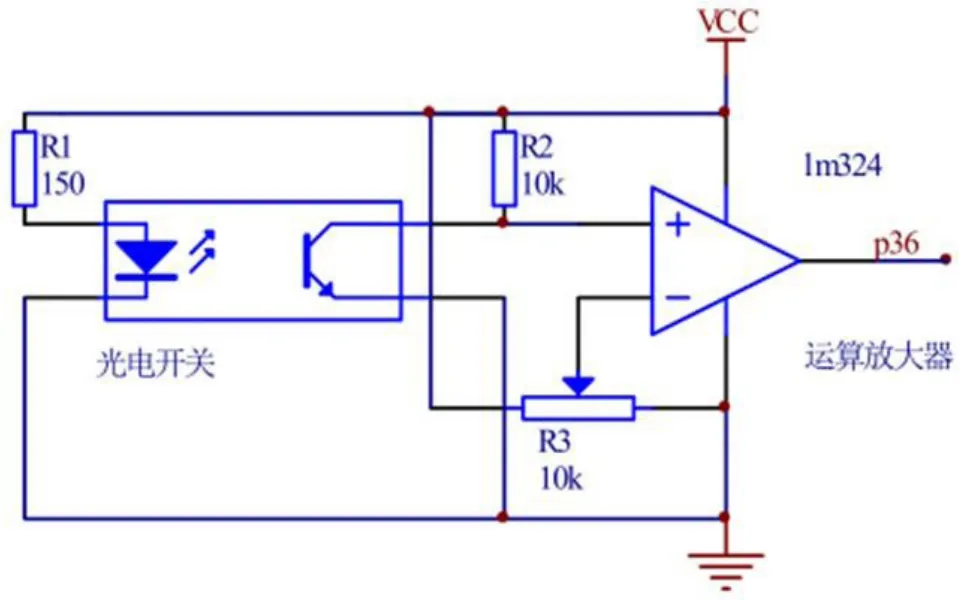
图3:红外传感器工作电路
2 硬件设计
教师提供了耐热性Taq酶发现、同功酶分子结构特点等材料,帮助学生理解生物如何依赖环境、适应环境,从分子水平上分析进化的本质就是生物大分子物质的演化,帮助学生形成生命基本观念中的“进化观与生态观”。
2.1 电源模块
LD3320语音识别芯片,内部已经固化了优化算法,通过口令触发模式和垃圾词语吸收模式可以提高语音识别的准确度。设计中语音通讯采用的是串口通讯,直接与STC89C52的RXD信号相连接。工作中将采集的语音信号送入到LD3320,进行解析并提取语音信息,将提取的语音信息与列表中的关键词进行对比与匹配,找出最匹配的关键词,送入到STC89C52单片机中。
语音小车的硬件部分主要有电源模块、主控模块、语音识别模块、电机驱动模块、避障模块、循迹模块和液晶显示等组成。
2.2 主控模块
采用STC89C52单片机作为系统的控制器,通过与语音模块、避障模块、电机驱动模块、显示模块等设备相互配合,在STC89C52中编写控制程序来实现对智能小车的控制。
2.3 语音识别模块
电源模块在小车的运行过程中,需要给单片机、电机、各大模块及传感器供电。为了保证系统的可靠供电,所以选择了可充电的7.2V/1300的NI-MH电池组作为供电电源。
2.4 电机驱动模块
左右两边的电机为语音小车的运动提供动力。设计中采用了一个电机驱动专用集成芯片LD298N来完成电机的驱动。STC89C52单片机通过I/O将控制信号送到电机驱动模块,L298N经过处理后的输出信号送入到电机的电源端,两组信号的值控制着电机的运转,通过改变单片机I/O口的状态(例如00:左电机停转,10左电机正转,01左电机反转等)来控制小车完成前进、后退、左拐、右拐等动作。电机驱动模块工作原理如图2所示。
半夜里女人出来,问手捧杂志的艾莉,都认识哪国文字?艾莉说,中文,英文,日文,法文,意大利文……女人问,越南文呢?艾莉说,一点点。女人问,柬埔寨文呢?艾莉说,皮毛。女人问,厂家造你时输入进去的程序?艾莉说,我是智能玩偶,我可以学。女人问,出厂时你就这样风骚?艾莉说,出厂时我还是女婴。与你一样,我也是从女婴长成女人的。女人问,你有名字吧?艾莉说,我叫艾莉。怎么称呼你?女人想了想,说,叫我主人吧!
2.5 红外避障模块
红外传感器安装在小车的左右两侧下方。循迹的跑道是预设的,需要人为设置黑色的条状线,当发射管发射的红外线遇到浅色地面时,会发生漫反射,接受管可以接受到信号,指示灯亮。当遇到黑色线条时,红外线被吸收,接收管接收不到信号,指示灯灭。当左边的传感器接受不到信号,需控制单片机向左旋转。当左边的传感器接受不到信号,需控制单片机向右旋转。若想提高检测的可靠性可左右各装两个传感器。红外传感器工作电路如图3所示。
2.6 ST188红外传感器寻迹模块
红外避障传感器是由发射管与接收管组成的,发射管发射红外线,当检测到障碍物时,接收管接受到红外线反射信号,经过LM324比较器后,输出一个低电平信号送给单片机。本小车只设计了避开障碍物的功能。检测距离可以通过旋转电位器的旋钮来调节,有效的检测距离范围是2~30cm。
2.7 显示模块
崇礼东沟为清水河源头,起于崇礼区北部与张北县交界的桦皮岭山脚下[2],自东北向西南,流经清三营、狮子沟、白旗、西湾子等村镇[3],在中山沟附近与正沟汇合,汇流口以上流域面积766km2,河道长84km,河道纵坡1.21%。西湾子镇建有崇礼水文站,控制流域面积430km2,具有1958~1961年、1982~2011年共34年不连续实测洪水资料。
3 软件设计
软件的设计包括:主程序控制的设计、语音控制设计、红外循障设计、红外循迹设计、显示报警设计等。
3.1 主程序模块
在语音程序设计中采用定时器中断的方式,执行完初始化程序后,开始语音识别,语音识别要设置麦克风的输入通道及其增益值,增益值设置在45H左右,当有语音信号输入时,通过相关运算函数对采集到的信息进行分析、处理,得到对应的语音数据,语音控制流程如图5所示。
设计采用LCD1602液晶显示屏,LCD1602可以显示数字和符号等,通过字库软件可以方便的生成设计中所需要的汉字的编码。设计中主要用LCD1602显示智能小车行驶运动的方向、行驶状态等信息。
3.2 语音控制
系统上电后,启动初始化程序,判断有无中断发生,若有中断发生判断是语音中断还是避障中断。当发生语音中断时,执行语音子程序。当发生避障中断时,执行避障子程序。执行完子程序后,送电机控制信号并启动液晶显示子程序,主程序流程如图4所示。
3.2 小车红外避障控制
在红外避障的控制程序中,首先检测是否有障碍物。当检测到有障碍物时,判断是做左边的传感器检测都到的还是右边的传感器检测到的,若是左边,则小车需先后退,然后右转。如过是右边的传感器检测到的,则小车应该先后退再左转。
3.3 小车循迹流程图
给STC89C52单片机定时器0预置初值,使其在P1.4及P1.5口产生PWM方波信号,来改变电机两端的电压,就可以控制小车运行速度。小车行驶时,单片机不间断地扫描与红外传感器的信号,判断是否遇到黑线,并将检测到的黑线信息后,进行判断处理,并将信号传送到L298N电机驱动模块来控制电机,使小车沿黑线行驶。小车寻迹流程如图6所示。
4 结束语
本智能小车控制系统以晶宏公司的STC89C52单片机为控制器,采用C语言在Keil软件进行编程。其基本过程如下:首先通过麦克风采集语音信息,送入到LM3320识别语音模块,从列表中找到与之匹配的关键词,将结果送给STC89C52单片机,单片机将收到的信号后,进过判断处理,将控制信息送给电机驱动模块,来控制小车则完成前进、后退、左拐、右拐等动作。避障及循迹部分通过红外传感器来检测信号,将检测到的信号送到单片机,由单片机处理后控制小车的行驶状态。实现了一个集语音识别、自动循迹、避障、液晶显示等功能于一体的智能小车控制系统系统,通过实物验证,取得了较好的效果。系统成本费用低,操作简单,具有扩展升级空间,在生活中应用范围广,非常实用。
在临床中接诊之后应当及时按照患者的病史、症状、体征及辅助检查结果快速判断,筛选出高危胸痛,并及时处理,提高患者预后效果。在鉴别中因为患者的疼痛情况、病史以及疼痛部位等存在差异,所以为了有效提升鉴别诊断效果,需要在诊断初期,做好全面的检查,综合进行初步判断。100例患者中94例患者通过有效治疗后痊愈或好转出院(94.00%)。
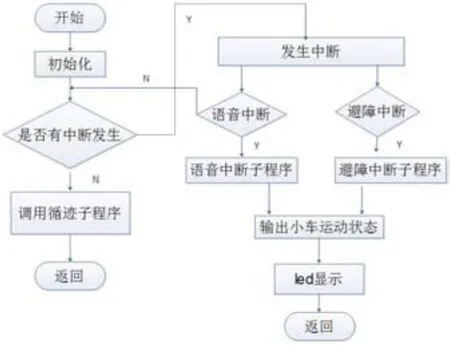
图4:主程序流程图
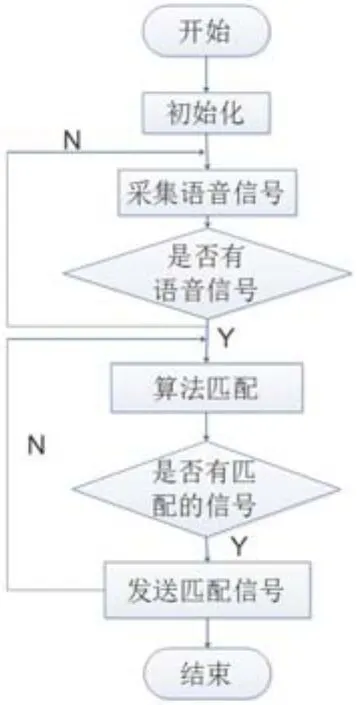
图5:语音控制流程图
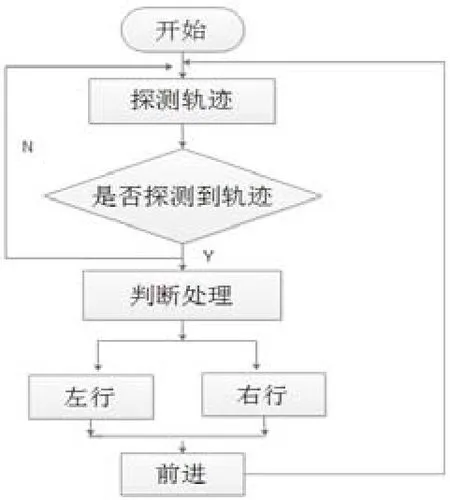
图6:小车循迹控制流图
