基于快速响应PSP技术的跨声速脉动压力实验研究
2019-01-30任一鹏杨小龙林崧于靖波武玉玉杨学军
任一鹏,杨小龙,林崧,于靖波,武玉玉,杨学军,朱 莉,黄 宇
(1. 北京宇航系统工程研究所,北京 100076; 2. 中国运载火箭技术研究院,北京 100076;3. 中国航天空气动力技术研究院,北京 100074)
0 引言
在风洞实验中,表面压力定量测量是了解飞行器气动特性的基础,对理解流场特性、分析飞行器气动特性具有重要价值,是飞行器设计的重要依据。
压敏涂料(PSP)测量技术提供了非接触式的光学测压手段,可对复杂飞行器模型进行高空间分辨率的表面压力测量。目前PSP技术通常应用于定常压力的测量,压敏涂料的响应时间约为秒量级。为满足飞行器结构强度、刚度、颤振分析需求,能够捕捉大面积压力脉动的快速响应PSP技术在近年来开始发展,为飞行器动态气动特性及复杂空气动力学现象的研究提供了支撑。
国外的快速响应PSP技术研究起步较早,目前的响应时间能达到几十微秒至毫秒量级[1-5]。国内方面,中国空气动力研究与发展中心、中国航天空气动力技术研究院、中国航空工业空气动力研究院等优势单位近年来开始了快速响应PSP测压技术的研究,但尚未开展飞行器工程应用层面的实验[6-9],仅开展了局模级别的验证实验[10-12]。
PSP测压技术与常规传感器测压技术的比较如表1所示。从表1中可见,在精度满足要求的前提下,PSP测压技术更适合于飞行器工程研制需求。本文综合考虑弹箭类飞行器脉动压力载荷设计需求,利用快速响应PSP技术对弹箭类飞行器全表面的跨声速段脉动压力特性开展风洞实验研究,获得了Ma=0.8~1.2范围内弹箭类飞行器全表面1.2s实验时间段内的脉动压力,较全面地分析了马赫数、攻角(舵偏角)对脉动压力分布特性的影响。实验结果表明,快速响应PSP技术的脉动压力测量结果与高精度脉动压力传感器结果较为吻合,均方根脉动压力系的测量误差小于15%,精度要求满足工程设计使用;与传统脉动压力传感器测量方式相比,快速响应PSP测量方式能够获得弹箭类飞行器全表面的脉动压力分布特性,有利于准确捕获脉动压力峰值、辨识非定常流场结构,可更好地指导弹箭类飞行器脉动压力载荷设计。该实验方法在弹箭类飞行器设计研制中有较高的工程应用价值。

表1 PSP测压与传感器测压比较
1 实验原理
1.1 压敏涂料基本原理[6]
PSP技术的基本原理是压敏涂料探针分子的光致发光和氧猝灭效应,是一种光学测压技术。受到适当波长的光照射后,压敏涂料被激发出波长更长的光,如图1所示。氧分子的对压敏涂料探针分子的“氧猝灭”效应,使得当地静压越高,荧光减弱越严重。通过测得飞行器模型表面的荧光光强分布即可换算得到飞行器模型表面的压力分布。

图1 压敏涂料测量基本原理示意图Fig.1 Schematic of the basic principle of PSP measurement
利用Stern-Volmer公式,可由实验测得的光强换算得到测量压强
(1)
式中,P和I分别为实验压力和实验光强,Pref和Iref分别为参考压力和参考光强,通常选择一个大气压为参考压力,参考压力条件下的光强作为参考光强;A(T)和B(T)为压敏漆的校准系数,由压敏漆校准曲线确定。
1.2 快速响应压敏涂料特性[6]
将发光染料和聚合物胶黏剂溶于溶剂,形成的混合物即为常用的压敏涂料。风洞实验中,将压敏漆喷涂或刷涂在实验模型表面,待溶剂挥发后,涂层内发光分子便固定在聚合物中。压敏涂料的黏合力、硬度、涂层的平整度和厚度,都应满足实验要求,如黏合力应能承受风洞实验中的空气摩擦力和冲刷力;应尽量降低涂料的粗糙度和涂层厚度,一般来说,涂料的最大均方粗糙度应小于0.25μm,涂层厚度范围为20μm~40μm。
本次脉动压力测量实验中使用的快速响应压敏涂料由中国航天空气动力技术研究院和中国科学院化学研究所共同研制,该涂料以稳定性较强的PtTFPP(化学结构如图2所示)作为发光基团,由聚合物形成多孔性涂层结构,荧光探针分子包含在微孔中,能够增大空气接触面积,使得响应扩散率增加,从而降低了反应时间。以波长400nm的紫外光为激发光源,快速响应PSP涂料激发出的荧光发射波长约600nm~700nm,有氧空气环境(air)和无氧氮气环境(nitrogen)下快速响应PSP涂料的发射光中心波长和发射光强度如图3所示。
图2 PtTFPP的化学结构Fig.2 Chemical structure of PtTFPP
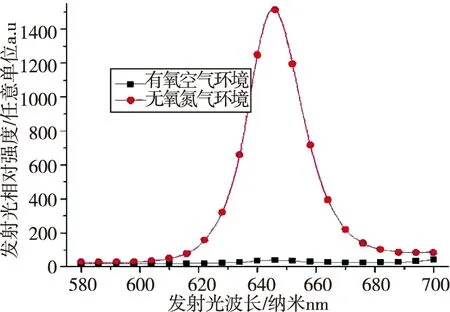
图3 快速响应PSP涂料的发射光谱Fig.3 Emission spectra of fast response PSP
快速响应压敏涂料的响应时间在毫秒甚至微秒量级,涂料的响应时间决定了风洞实验时非定常流场脉动压力的采集频率。在正式实验之前,需要通过静态标定实验确定涂料的基底光强、Stern-Volmer关系系数、使用稳定性、温度依赖性,通过动态标定实验确定涂料的快速响应时间特性。
静态标定装置如图4所示,压敏涂料样片放置在压力腔内,腔内压力和温度由真空泵和低温循环机控制。在不同压力和温度条件下,用风洞实验相同的光源照射,用相同的相机进行拍摄得到相应的图像组,对图像处理后得到光强-压力曲线。标定的温度范围从25℃~50℃,压力范围从10kPa~100kPa。基于PtTFPP发光基团的压敏涂料在不同温度条件的静态标定曲线如图5所示。

图4 PSP静态标定装置Fig.4 Static calibration device
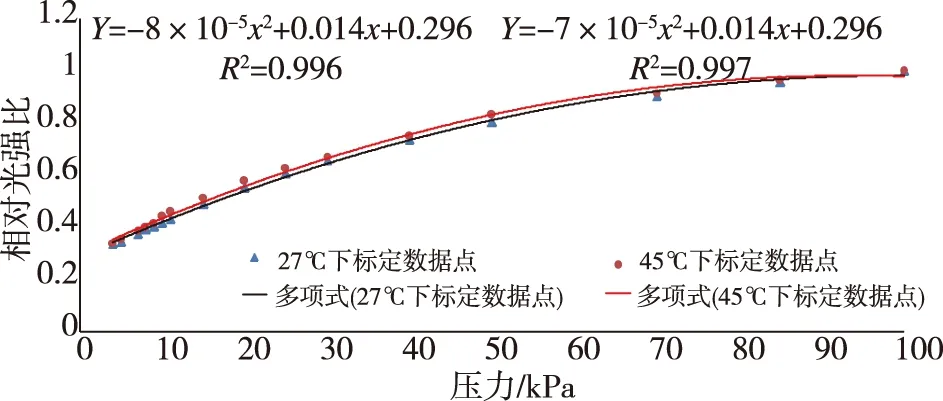
图5 压敏涂料不同温度静态标定曲线Fig.5 Calibration curves of PSP at different temperature
高速脉冲射流动态标定装置如图6所示,用高压氮气作为气源产生瞬时脉冲射流获得压力阶跃,其产生的压力阶跃时间可达0.1ms,压力阶跃的时间由Kulite传感器记录,光强阶跃的时间由PMT记录。分析光强阶跃的时间曲线,能得到PSP对压力变化的响应时间。经过不断改进涂料性能,响应时间从300ms降低至0.2ms,能够初步满足本实验的非定常脉动压力测量的需求。典型的PSP压力阶跃信号如图7所示,其中蓝色曲线是根据快速响应PSP涂料的测量信号,黑色曲线是5个响应周期平均处理后的结果。
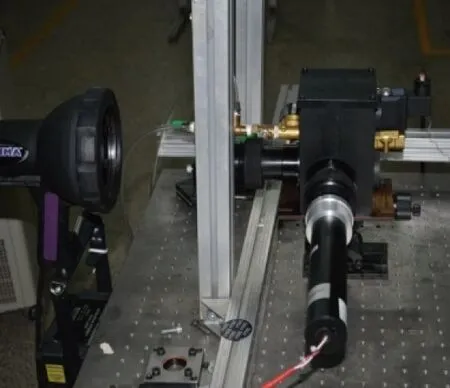
图6 快速响应PSP动态标定装置Fig.6 Dynamic calibration device of fast response PSP
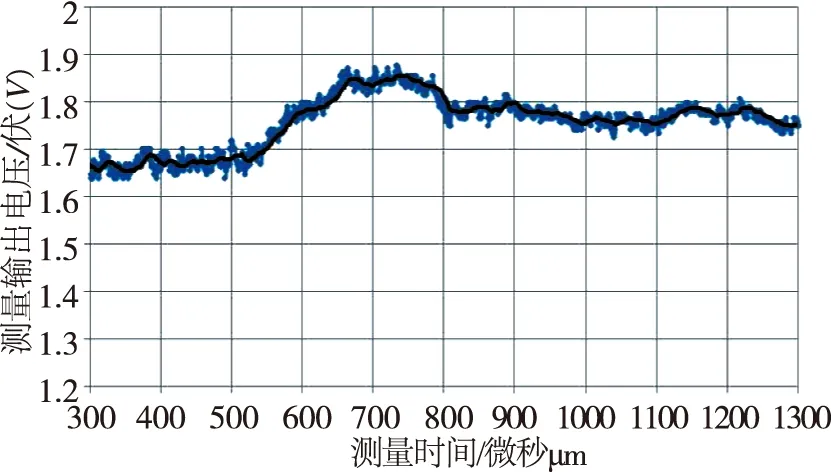
图7 典型的PSP响应时间Fig.7 Normalized response time of PSP
2 实验方案
实验是在中国航天空气动力技术研究院的亚跨超声速风洞中进行。该风洞是一座直流暂冲式三声速风洞,实验马赫数范围为0.3~4.0,攻角范围为-15°~25°,侧滑角范围为-12°~12°。风洞实验段横截面尺寸为1.2m×1.2m,亚跨声速实验段长3.8m,超声速实验段长2.4m。
实验模型为常规的弹箭类飞行器,箭体为锥-柱类细长旋成体,箭体尾部有3片“T”型周向布局的空气舵。模型在风洞中采用尾部支撑方式,表面全部涂有快速响应PSP涂料。为有效利用风洞两侧壁的观察窗,模型侧向安装,用侧滑角机构实现不同攻角状态。
实验测量系统主要包括相机、滤光器、光电探测器、光源和数据采集处理。选用位深12bit、感光灵敏度4000的Photron SA5高速相机,该相机在分辨率为1024×1024像素条件下的采集频率可达7000帧,选用35mm或50mm焦距的相机镜头,在风洞运行时保证采集图像在不过曝的前提下最大程度地接受PSP辐射出的荧光;相机镜头前安装(650±10)nm的带通滤光片,防止其他波段光线的干扰;实验光源为两个600W氙灯紫外光源。在PSP实验测量中,需要尽可能增大光源及相机与模型表面的正交性,从而保证实验测量结果较好[6]。
本次实验中,3台相机分别在实验段的两侧和顶部拍摄模型,2台实验光源分别在实验段两侧照射模型,风洞实验装置如图8所示。实验中相机采集频率为1000f/s和5000f/s,每次实验都连续采集2000张吹风状态下的图像,然后采集100张无风状态下的参考图像。

图8 实验模型布置示意图Fig.8 Layout of experimental model
为有效评估快速响应PSP技术获得的脉动压力频率和测压精度,本实验在模型上布置了6个Kulite XCQ-080高精度脉动压力传感器,并配备信号频带宽度为DC-200kHz的DH5927动态测试信号分析系统,用于与PSP测量结果的对比和校准。脉动压力测点编号及位置示意图如图9所示,其中1、2号测点测量流动分离再附引起的脉动压力特性,4、5号测点测量局部突起物引起的脉动压力特性,3、6号测点测量尾舵与箭体波系干扰产生的脉动压力特性。
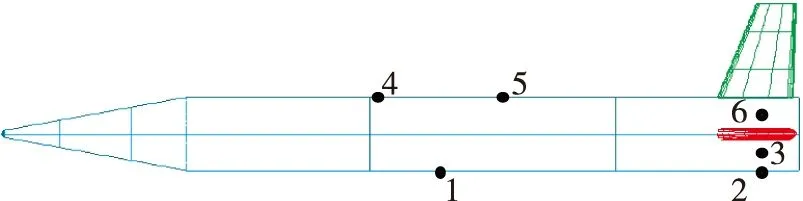
图9 实验模型测压点编号及位置示意图Fig.9 Numbering and position diagram of the pressure measurement points in the experimental model
基于快速响应PSP的跨声速脉动压力测量实流程如图10所示。
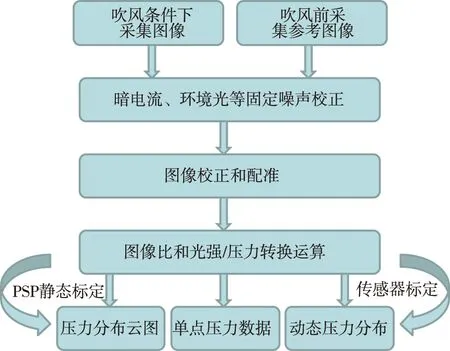
图10 实验流程示意图Fig.10 Schematic diagram of experimental process
3 实验结果分析
3.1 快速响应PSP测量结果准确性验证
马赫数Ma=1.0、攻角α=0°、舵偏角δ=0°时,快速响应PSP获得的舵面压力系数云图与CFD计算结果的比较如图11所示,由图11可知PSP获得的舵面高压、低压分布合理。

图11 舵面压力系数云图(实验与计算结果比较)Fig.11 Comparison of the experiment and CFD calculation results of the pressure coefficient of the rudder
不同采样频率会影响快速响应PSP测量结果,为此开展了马赫数Ma=1.2、攻角α=0°、舵偏角δ=0°条件下的采样频率影响研究。针对舵面某一特征点,1000Hz和5000Hz采样频率时,PSP获得的压力系数随时间的变化曲线如图12所示;脉动压力无量纲功率谱密度随无量纲频率的变化曲线如图13所示。对比1000Hz和5000Hz采样频率时的压力系数发现,随采样频率的提高,PSP测量得到的压力脉动值会略微增大,但压力均值变化波动在3%以内;对比1000Hz和5000Hz采样频率时的功率谱密度发现,二者在低频部分功率谱密度函数曲线相近,舵面上监测点的功率谱密度很低,变化较小,并不存在明显的主频。PSP脉动压力实验中,为保证测量精度,典型状态同时选用1000Hz和5000Hz的采样频率。
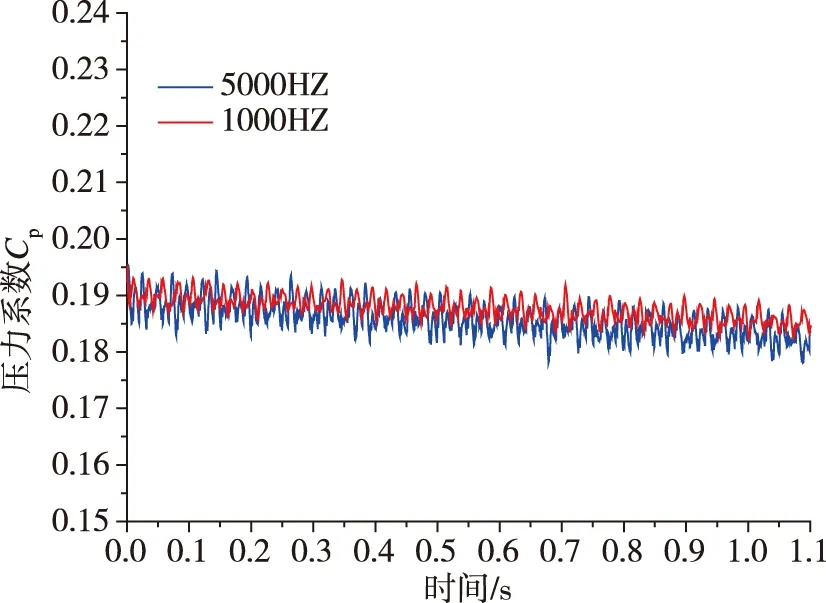
图12 不同采样频率时压力系数随时间变化曲线Fig.12 Curve of pressure coefficient with time at different sampling frequency
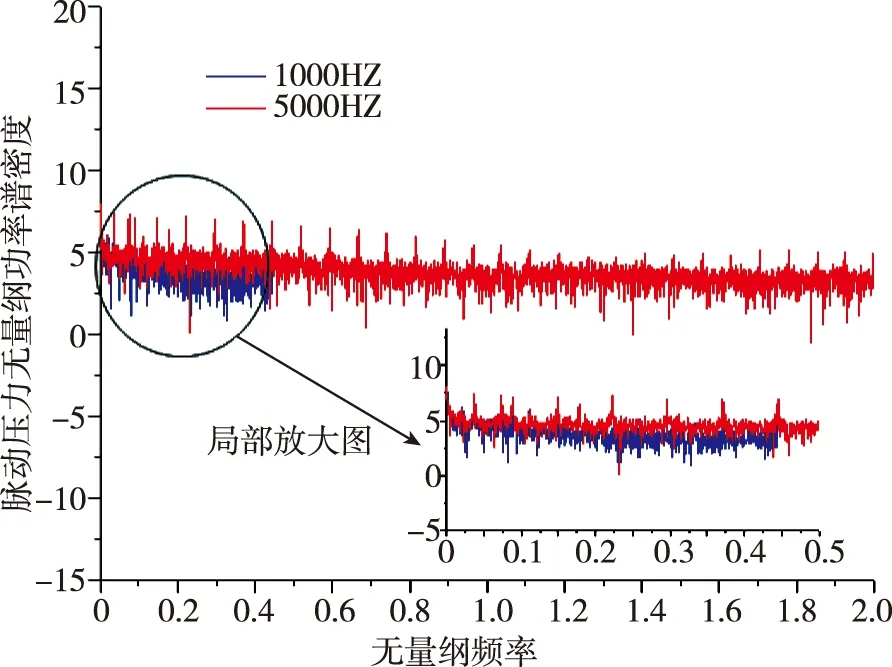
图13 不同采样频率时脉动压力功率谱密度随频率变化曲线Fig.13 Fluctuating pressure power spectral density with frequency variation curve at different sampling frequency
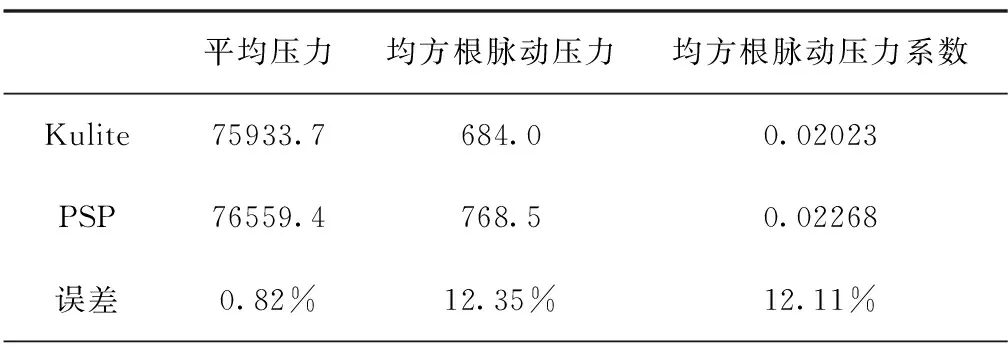
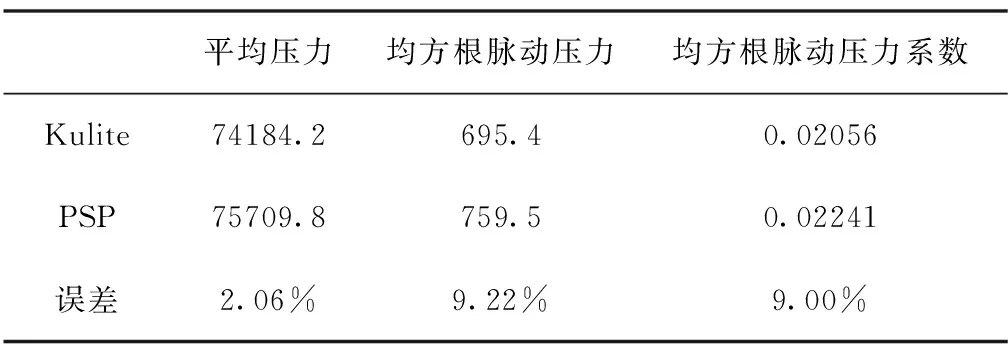
平均压力均方根脉动压力均方根脉动压力系数Kulite75933.7684.00.02023PSP76559.4768.50.02268误差0.82%12.35%12.11%
(b)测点6
(a)测点3
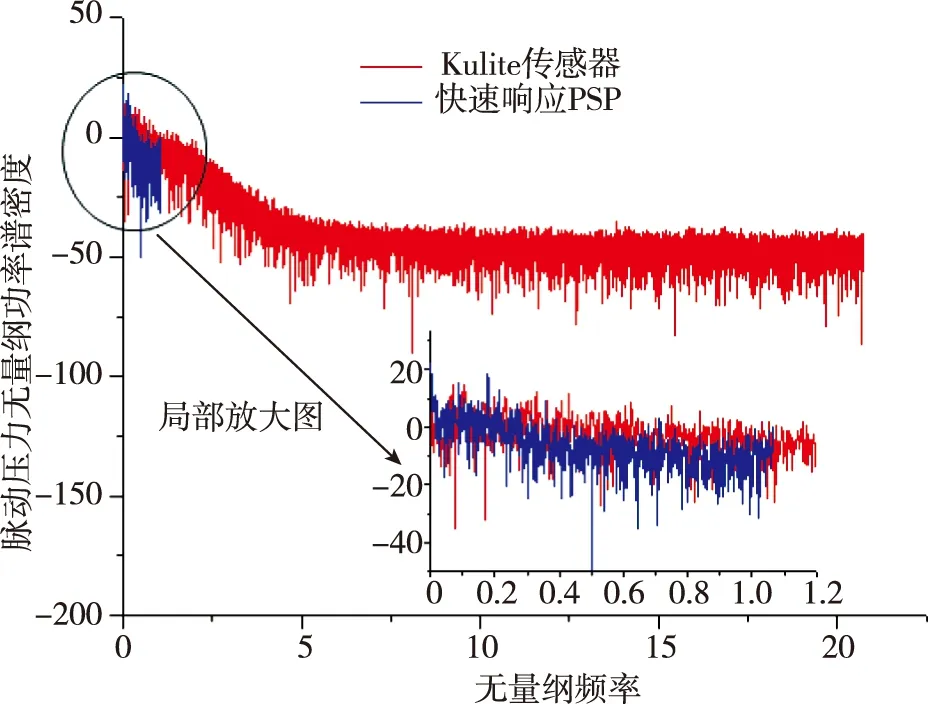
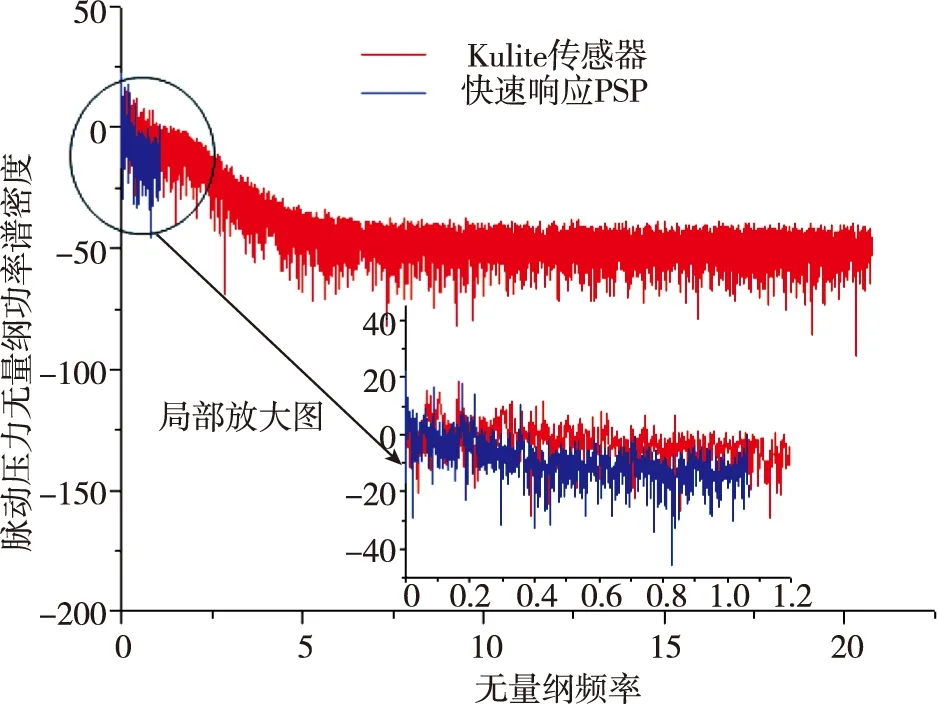
(b)测点6图14 传感器与PSP的脉动压力功率谱密度比较Fig.14 Comparison of fluctuating pressure power spectral density between sensors and PSP
马赫数Ma=0.8、攻角α=0°、舵偏角δ=0°时,3号和6号测点位置的Kulite传感器与PSP的脉动压力统计值的比较如表2所示,脉动压力功率谱密度的比较如图14所示。对比可见,PSP与Kulite传感器获得的脉动压力平均值一致性很好,差异小于5%,脉动压力均方根值量级相同,差异小于15%;PSP和Kulite传感器获得的无量纲功率谱在低频部分吻合度较好,能够有效地捕捉由非定常激波诱导的分离及分离再附引发的大幅值、中低频压力脉动,受限于PSP采样频率(远低于Kulite传感器),目前快速响应PSP还无法获取脉动压力的高频特征信息。通过与传感器数据的比较,进一步验证了快速响应PSP测量结果的正确性。
3.2 攻角对跨声速脉动压力特性的影响
马赫数Ma=0.8、舵偏角δ=0°时,不同攻角条件下快速响应PSP获得的特定时刻的弹箭类飞行器全表面压力系数云图如图15所示,可以看到,随着攻角绝对值的增加,迎风面的PSP测量结果显示为压力值升高,符合流场规律,与脉动压力传感器的数据变化趋势也一致。攻角绝对值较大时,背风面的PSP测量结果与脉动压力传感器的测量结果略有差异,判断主要是受光源布置的限制,大攻角状态时背风区模型表面接收到的光强度减弱,引起PSP测量产生一定误差。
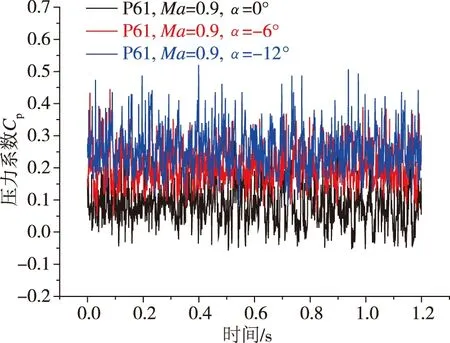
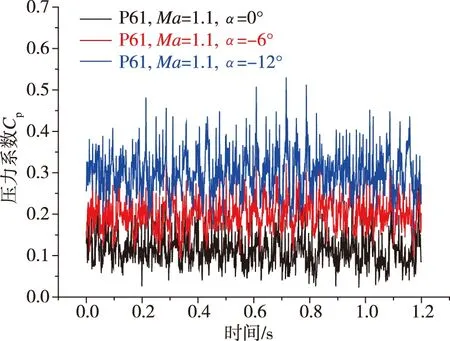
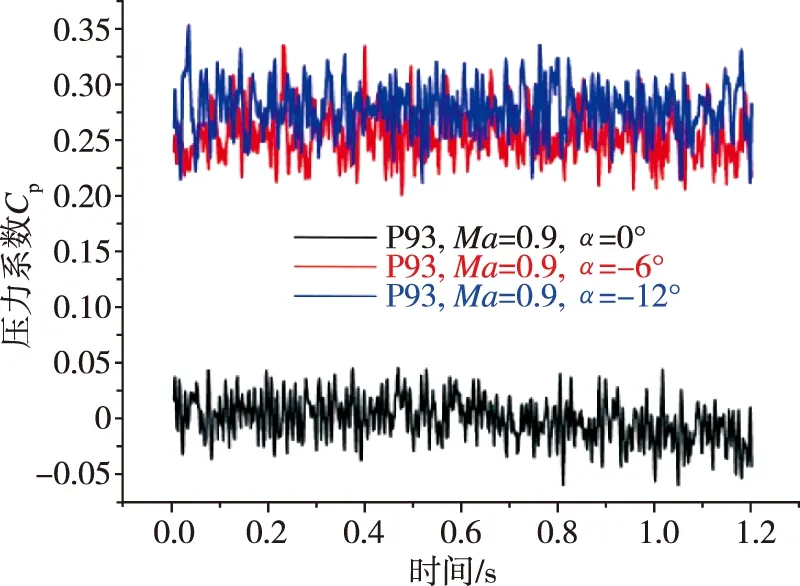
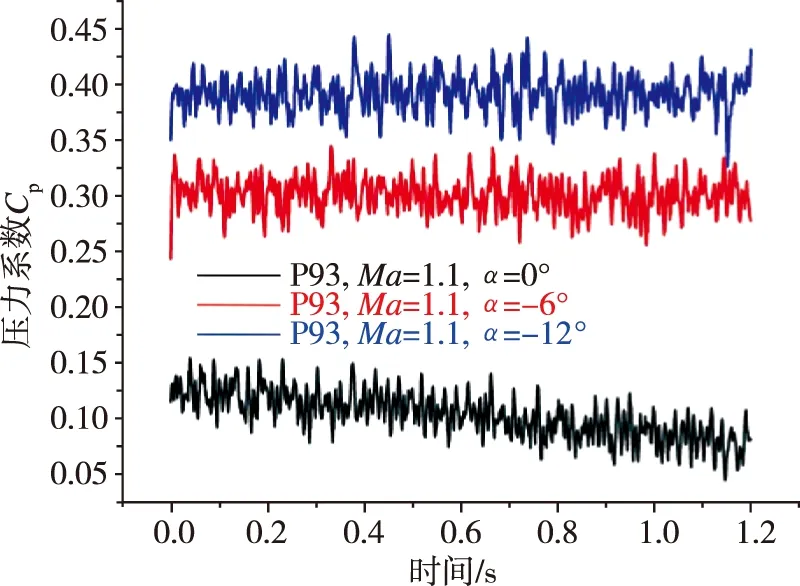
为避免背风面光强差异引起的PSP测量误差,在箭体及尾舵迎风面选择特征点(见图15中标示的P61和P93),得到的不同攻角时压力系数随时间的变化曲线如图16~图17所示。由图16~图17可见,不同攻角时,迎风面的压力平均值会有所差异,但压力脉动规律差异不明显,脉动压力的均方根值差异较小,频谱分析得到的脉动压力功率谱密度也大致相当。
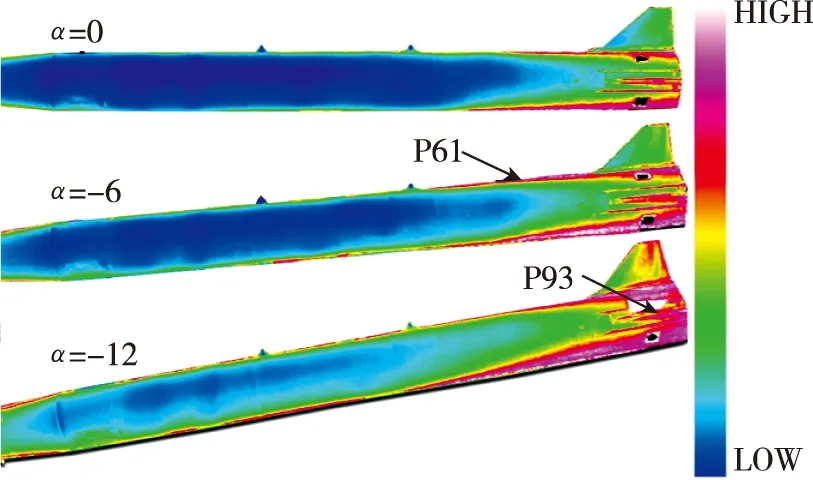
图15 不同攻角时飞行器全表面压力系数云图PSP实验结果Fig.15 PSP experimental results of full surface pressure coefficient of aircraft at different angle of attack(AOA)
(a)Ma=0.9
(b)Ma=1.1图16 箭体迎风面特征点压力系数随时间变化曲线Fig.16 Pressure coefficient with time at different AOA on rocket-body windward face detection point
(a)Ma=0.9
(b)Ma=1.1图17 尾舵迎风面特征点压力系数随时间变化曲线Fig.17 Pressure coefficient with time at different AOA on rudder windward face detection point
3.3 马赫数对跨声速脉动压力特性的影响
攻角α=0°条件下,不同马赫数时快速响应PSP获得特定时刻的箭体表面及尾舵迎风面、背风面压力系数云图如图18所示。由图18可见,箭体表面和尾舵迎风面的压力分布规律相对较为一致,马赫数影响较小;尾舵背风面存在明显的低压区,且随马赫数增加,低压区扩大,马赫数效应增强。
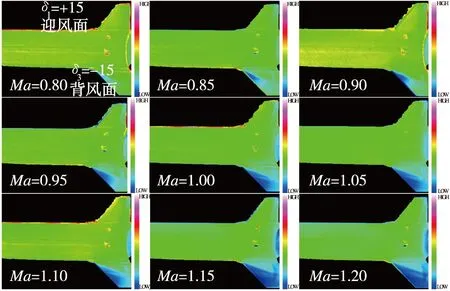
图18 不同马赫数时箭体及尾舵表面压力系数云图Fig.18 Pressure coefficient contour at different Ma
3.4 跨声速脉动压力非定常特性
马赫数Ma=0.85和0.95、攻角α=0°时,快速响应PSP获得的不同时刻箭体及尾舵的压力系数云图如图19~图20所示,箭体及尾舵迎风面特征点的压力系数随时间变化曲线如图16~图17所示。由图19~图20可见,箭体表面突起物干扰区、箭体-尾舵干扰区及尾舵背风面的压力分布均有较为明显的非定常特性,压力脉动量最大约为平均量的10%~18%;此外,尾舵与箭体之间的波系干扰、尾舵背风面涡系结构的周期性脱落,使得箭体表面的高压区、尾舵表面的失速区均存在位置游走、幅值震荡的现象。

图19 不同时刻箭体压力系数云图(Ma=0.85,α=0°)Fig.19 Pressure coefficient contour of rocket-body at different time

图20 不同时刻尾舵压力系数云图(Ma=0.95,α=0°)Fig.20 Pressure coefficient contour of rudder leeward at different time
4 结论
本文综合考虑弹箭类飞行器脉动压力载荷设计需求,利用快速响应压敏涂料(PSP)技术对弹箭类飞行器全表面的跨声速段脉动压力特性开展风洞实验研究,获得了Ma=0.8~1.2范围内飞行器全表面1.2s实验时间段内的脉动压力,较为全面地分析了马赫数、攻角(舵偏角)对脉动压力分布特性的影响。
快速响应PSP技术的脉动压力测量结果与高精度脉动压力传感器结果较为吻合,平均压力的测量误差小于2.5%,均方根脉动压力系的测量误差小于15%,精度要求满足工程设计使用。
快速响应PSP脉动压力实验结果显示,箭体表面突起物干扰区、箭体-尾舵干扰区及尾舵背风面的压力分布在跨声速段有较为明显的非定常特性,压力脉动量峰值为平均量的10%~18%。
与传统脉动压力传感器测量方式相比,快速响应PSP测量方式能够获得弹箭类飞行器全表面的脉动压力分布特性,有利于准确捕获脉动压力峰值、辨识非定常流场结构,可更好地指导飞行器脉动压力载荷设计,有较高的工程应用价值。同时,由于现阶段风洞设备的限制,光源和相机的布置位置受限,大攻角状态时模型背风区PSP测量会产生一定误差;此外,受限于相机和涂料的时间分辨率,PSP测量获得的脉动压力功率谱密度的频率覆盖范围较窄,需进一步改进,在保证测量精度的条件下提高有效采样频率。
