基于UWB的室外无人机中继目标定位应用
2019-01-30于翔
文/于翔
在未来战争及军事训练中,在山体、楼宇内部、军事演习场等卫星无法定位区域,快速对多个人员与装备目标进行三维精确定位,同时对运动轨迹进行跟踪分析,在军事训练工作具有非常大的用途。根据技术要求,本研究计划选用UWB技术,针对多个移动人员、装备的位置跟踪,结合未来军事战争对多目标大范围高精度的迫切需求,设计利用无人机中继与UWB技术进行高精度多目标定位方案,分析影响定位精度的误差因素,从而为无人机高精度多目标定位提供理论参考。
1 UWB技术概述
1.1 UWB技术特点
超宽带(Ultra Wideband)是一种无载波通信技术,UWB使用非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。UWB技术的主要特点是传输速率高、空间容量大、成本低、功耗低等。因此,超宽带技术被广泛应用于室内外静止或移动人员及装备的定位跟踪与导航,且能提供高达十厘米级定位精度。
1.2 UWB技术在军事上的应用
UWB技术所利用的超宽带脉冲具有极强的穿透能力,可在室内和地下等无GPS的环境下进行精确定位,与GPS提供绝对地理位置不同,UWB定位可以给出在其所覆盖区域内的目标相对位置。由于UWB具有数据传输速率优势,同时受发射功率限制与设备安装限制,在中短距离范围内提供高速无线数据传输是UWB在军事领域的主要应用领域。
军事领域中,利用小型全向垂直极化或圆极化天线,UWB视距通信范围可超过2km。UWB技术在军事上的应用在我国还处于起步阶段。近年来美军的作战技术将其引入,其目的是人员及装备在城市环境条件下能够以高分辨率来测定自身所在的位置。

图1:TOF测距方法
2005年,美军佐治亚州本宁兵营中的美军在城市地形军事行动 训练中采用了位于丹佛Ubisense公司的超宽带的RFID系统,跟踪在模拟村庄训练的士兵。
每个士兵佩带的UWB标签、激光射击感应器数据(MILES)和记录士兵进入和离开房间的红外线定位数据等,都被送入到系统软件中,由该系统产生训练士兵的位置报告。系统软件将MILES数据、房间内外的位置数据和时间戳编码后形成3D模拟现场,类似于视频游戏。训练过后分析再现数据,士兵们可以从中吸取教训,从而到达更好的训练结果。例如,在什么情况下射击,在什么情况下端枪不扣动板机。
1.3 UWB定位原理概述
本研究使用爱尔兰DecaWave公司的MDEK1001超宽带测距模块。该模块利用双向飞行时间法(TW-TOF)进行测距。每个模块从启动开始会生成一条独立的时间戳。模块A的发射机在其时间戳上的Ta1发射请求性质的脉冲信号,模块B在Tb2时刻发射一个响应性质的信号,被模块A在自己的时间戳Ta2时刻接收。可以计算出脉冲信号在两个模块之间的飞行时间,从而确定飞行距离

TOF测距方法属于双向测距技术(如图1),它主要利用信号在两个异步收发机之间飞行时间来测量节点间的距离。因为在视距视线环境下,基于TOF测距方法是随距离呈线性关系,所以结果会更加精准。我们将发送端发出和接收的回应时间间记为TTOT,接收端收到数据和发出回应的时间间隔记为TTAT,那么数据包在空中单向飞行的时间TTOF可以计算为:

图2:UWB三维定位原理

然后根据TTOF与电磁波传播速度的成绩便可计算出两点间的距离:

2 无人机光流定位
2.1 光流定位概述
无人机光流定位是当先遣急救人员或士兵在地下室、茂密的森林、高楼大厦密集的都市等GPS信号无法到达之处操作无人机时,借助于无人机底部的一个摄像头采集图像数据,然后采用光流算法计算两帧图像的位移,实现对无人机的高精度的定位,实现更加平稳的控制。
2.2 光流定位原理
假设摄像头采集到的两帧图像之间的像素灰度不变与相邻两帧的像素具有相对运动成立。
根据第一个假设,如果两帧像素的灰度值不变,那么有

其中I(x, y, t)表示在时间dt后移动到第二帧图像(x+dx, y+dy)的位置,对上式采用泰勒级数两边展开,消去相同项,即可得到如下方程:
其中fx和fy表示图像的梯度,ft表示时间梯度,采用经典的lucas-Kanade方法来进行求解。此时根据第二个假设,即在目标点的邻域内所有的点都具有相似运动。利用一个3*3邻域中9个点具有相同运动得到9个光流方程,然后采用最小二乘进行拟合求解,最终得到(u,v)如下:

以上为光流法计算像素点的移动速度的方法,对速度进行积分就可以得到位移。利用光流模块返回的位置信息或者速度信息,形成一个闭环控制,即可实现定点。在使用的时候,需要对图像中的一些点去跟踪,采用上面的方法就可以计算得到光流向量,根据得到的光流向量,就可以进一步优化无人机的姿态控制,实现更加准确的控制。
3 基于UWB的室外无人机中继目标定位应用实践及分析
3.1 原理分析
为实现三维定位,需要求出被定位设备的XYZ三维坐标,在基站架设的时候,需要特别拉开Z轴的高度差,以确保在Z轴上的精确度。使用TOF的方式,三个基站就可以完成三维定位。地面架设可利用架设安装杆的方式,为获得精准的三维定位数据,可使用加装基站无人机进行定点悬停的方式进行对Z轴高度的测量(如图2)。
3.2 实验验证
3.2.1 实验装置
MDEK1001模块6个,四旋翼无人机1架,模块支架4个。
3.2.2 实验过程
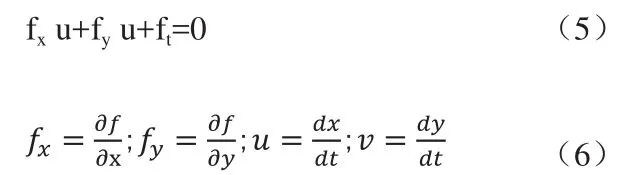
将3个MDEK1001模块分别布置于实验场地中的模块支架上,高度为2米。利用四旋翼无人机挂载1个MDEK1001模块保持5米高度定点悬停,将以上4个模块设置为基站模式。使标签按规定线路进行运动,利用模块的Listener功能对标签位置进行跟踪,使用Tera Term对数据进行读取,利用origin绘制轨迹(如图3)。
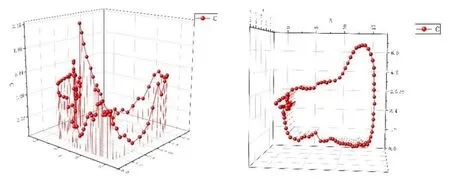
图3:目标轨迹图
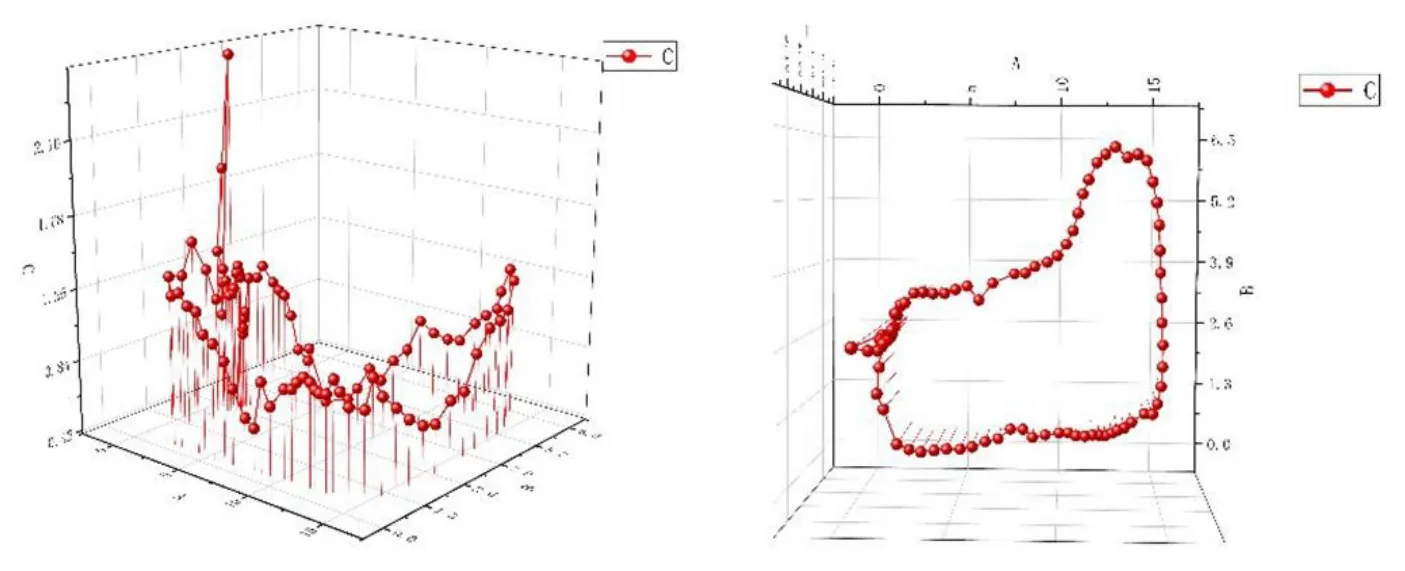
图4:目标轨迹图
将无人机上搭载的MDEK1001模块固定至同高度位置的安装支架上,再次按规定线路使标签进行运动并测量。得到数据如图,利用origin绘制轨迹(如图4)。
3.2.3 实验结果分析
通过实验,对比两次实验结果中,相同位置状态下同一标签在固定基站的UWB定位系统及将基站挂载在无人机的UWB定位系统位置解算结果,分析无人机中继对误差的影响。根据以上实验结果对比可以得出, 由于无人机自身的稳定性及电磁干扰,使用无人机中继会使UWB定位出现5-10cm的偏差,对被测标签跟踪效果较好。
4 结束语
本研究通过对UWB原理、光流定位原理进行分析,对固定UWB基站测量标签轨迹与以无人机为中继进行标签轨迹测量进行比较及误差分析。分析误差产生原因及实验效果,验证了以无人机为中继进行UWB定位的可行性。
存在需要加强和改进的方面:
(1)UWB系统占用带宽很高,在使用过程中可能会干扰现有其他无线通信系统。
(2)无人机在复杂环境下光流定点的稳定性还需要加强。
以无人机为中继的UWB定位系统无论在定位精度、传输能力穿透力实时性等方面与其他的无线定位技术相比都有明显优势,而且由于无人机的快速移动,可以快速搭建定位系统,弥补了UWB固定装置的搭建速度慢的特点。能够满足未来战争及军事训练中对定位精度及速度的要求,可以预见UWB技术未来会在我军军事训练领域得到广泛应用。
