基于53H滤波的船舶综导信息在线平滑方法
2019-01-30耿建宁
吕 武,耿建宁
(中船航海科技有限责任公司,北京 100070)
0 引 言
随着现代控制理论以及计算机技术的发展,为了满足船舶高精度和高可靠性等方面的导航性能要求,目前国内外船舶导航系统向着以惯性导航系统为中心的多传感器容错导航系统的方向发展[1-4]。而导航系统可靠性的提高除了采用可靠的硬件之外,通过有效的数据处理方法也是提高可靠性的重要途径。
综合导航系统接收来自不同类型传感器的信息,由于自身故障、环境干扰或者通信异常等问题,这些信息可能包含异常误差。如果综导系统融合了这些含有异常误差的数据,那么综导系统的精度会下降,甚至完全不可用。因此在综导系统进行信息融合前,对各子系统的信息进行在线监测与野值数据处理显得尤为重要。
针对上述问题,本文提出一种基于53H滤波的综导信息在线平滑算法。该算法不要求数据满足高斯正态分布,也不需要事先知道数据的标准差,而且算法实现简单,适合对各导航传感器的信息进行在线的信息监测和数据平滑。
1 改进的53H滤波算法
53H滤波算法最先由Tukey提出[13],其基本思想是产生一个曲线的平滑估计,然后通过将测量值与这一估计值进行比较来识别异常点。其基本步骤如下:
1)假设在线测量的数据序列为x(i),根据x(i)构造一个新序列x1(i),方法为:从x(1),x(2),x(3),x(4),x(5)选择中值作为 x1(3),然后从x(2),x(3),x(4),x(5),x(6)中选出中值作为 x1(4),依次类推,直到当前的数据 x(i)。
2)按照步骤1)类似的方法,从 x1(j)中相邻的3个数据中选取中值构成x2(k)。
3)最后由序列x2(k)按照如下方式构成x3(l):

4)如果有下式成立,则用 x3(l)代替x(l),

其中,T 为一定的阈值。
易知该算法对数据的前4个和最后4个数据得不到有效的平滑,所以文献[13]提出了一种改进的53H滤波算法。
5)将x(i)的前8个和最后8个数据点反序排列,其余数据不变生成序列 x′(i)。
6)对序列 x′(i)重复前4个步骤,形成新的 x′3(l)序列,用新序列中的 x′3(5),x′3(6), x′3(7), x′3(8), x′3(l-7),x3′(l-6), x′3(l-5), x′3(l-4)分别替代序列 x(i)中的 x(4),x(3),x′3(2),x(1),x(l), x(l-1), x(l-2), x(l-3)。
为了达到实时平滑的目的, x3(l)和 x′3(l)可以并行计算。由于改进的53H算法对序列的开始和末尾的8个点进行了正反2次平滑,但是容易发现,即该算法仍然存在4个数据点的延迟。
2 基于改进53H滤波的信息在线平滑
船舶综合导航系统的信息综合处理路程如图1所示。
可知,船舶综合导航系统同时接受来自惯导、卫导、罗经、计程仪等导航传感器的信息,这些信息经过一些合理性及有效性检测等预处理后送到导航信息评估模块,再送信息融合与集成处理模块进行融合处理与分发。这些导航传感器信息由于自身故障或者受到干扰以及通信中出现的问题可能会产生跳变等异常的数据,因此需要在预处理中对这些数据进行检测和提出。目前的野值剔除方法主要有有效位判定,合理性检查,拉格朗日插值2数据是正常的,否则会导致数据失真;基于加权最小二乘的滑动平滑滤波的计算量较大,且对较大的野值无法有效剔除。
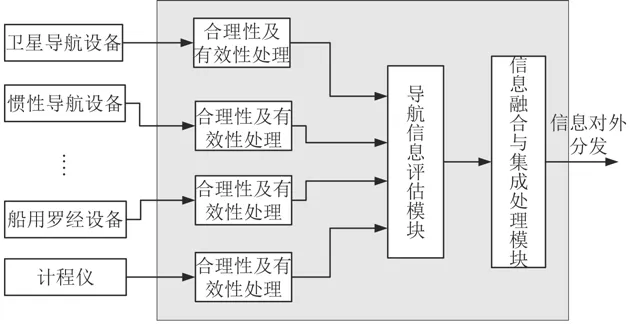
图1 船舶综合导航信息综合处理流程图Fig. 1 Flow chart of ship integrated navigation information processing
这些信息按照一定的频率进行传输,因此可以把它们当成时间序列。由于数据传输频率远高于航行速度,因此个别数据点的延迟对综导系统的影响并不大,因此可以使用改进的53H算法对来自各个导航系统的信息进行在线平滑。
3 试验验证
为了验证本文所提出方法的有效性,采用该方法对海试试验数据进行处理分析,同时与最小二乘加权滤波和5点3次平滑算法进行对比。其中最小二乘滑动滤波的滑动窗取,假设数据采样周期 T=1s,53H滤波的阈值设为:经纬度的阈值 Tp=Vmax/R,速度的阈值 Tp=amax∗T ,姿态角的阈值 Tφ=ωmax∗T,其中,Vmax ,amax ,ωmax分别为船的最大速度、加速度和角速度。
本文所选用的数据为某试验船综导系统采集的导航数据,包括惯导系统、卫导系统、计程仪、测速测深仪、电罗经等传感器的数据,采样频率为1 Hz,采样时间大约为11 h。以惯导为例,其输出参数包括经纬度、东向速度、北向速度、横摇角、纵摇角和航向角。输出数据如图1~图3所示。从图中可以看出惯导参数存在一些野值点,特别是速度和航向信息野值比较突出,如果直接对这些数据进行融合,将会产生较大的误差。
为了避免野值点对系统精度的影响,对上述数据分别使用最小二乘滑动滤波法、5点3次平滑法以及改进的53H滤波法,进行在线平滑处理。由于篇幅原因不一一列出所有的平滑结果,仅选择其中的东向和北向速度滤波结果进行分析,如图5和图6所示。

图2 惯导测量经纬度Fig. 2 Longitude and latitude measured by inertial navigation system

图3 惯导测量速度Fig. 3 Velocity measured by inertial navigation system
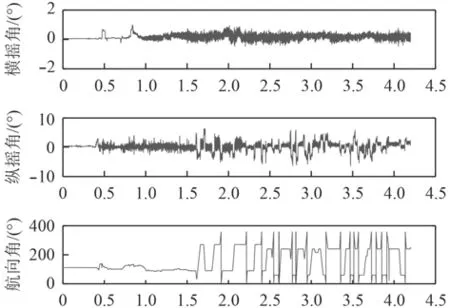
图4 惯导测量姿态角Fig. 4 Attitude angle measured by inertial navigation system
由图5和图6可以看出,5点3次平滑结果严重失真,对大的野值没有完全剔除,仅仅削弱了野值的幅值;最小二乘平滑算法没有出现失真,但是也没有完全消除野值;而基于改进的53H滤波法成功剔除了所有的野值点,而且保持了原始数据的真实性。根据上述分析表明,本文剔除的基于改进的53H在线平滑算法可行。
4 结 语

图5 东向速度滤波结果Fig. 5 Filtering results of eastern velocity

图6 北向速度滤波结果Fig. 6 Filtering results of north velocity
本文首先阐述了53H滤波方法的原理及其改进方法,然后分析了该方法在船舶综合导航系统信息在线平滑上的运用,最后通过实测数据试验,并与最小二乘平滑滤波及5点3次平滑方法进行性能对比,试验结果表明5点3次平滑方法对于较大的野值点没法完全剔除,滤波会产生结果失真;最小二乘平滑滤波法计算量较大,且对大野值点只能起到抑制的作用。而本文提出的该方法计算简单、具有很好的野值剔除效果,可用于综导系统信息的在线平滑。