基于真实事故案例的自动紧急制动系统两轮车测试场景研究*
2019-01-29雷正保
胡 林,易 平,黄 晶,张 新,雷正保
(1.长沙理工大学汽车与机械工程学院,长沙 410114;2.长沙理工大学,工程车辆安全性设计与可靠性技术湖南省重点实验室,长沙 410114;3.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082)
前言
随着汽车数量的不断增长,交通事故也随之增多。每年,全球约有120万人死于交通事故。在我国道路交通中,每年发生的交通事故约50万起,死亡人数超过10万人,居世界第一[1]。据国家统计局统计,2016年我国共发生摩托车道路交通事故43 196起,造成52 528人受伤,11 235人死亡;发生非机动车道路交通事故17 747起,造成19 678人受伤,2 968人死亡;其中,发生自行车道路交通事故1 460起,造成1 337人受伤,341人死亡[2]。为此,提高汽车安全性能,减少交通事故或减轻交通事故,尤其是两轮车道路交通事故所造成的伤害,成为全社会所关注的焦点。
自动紧急制动(AEB)系统作为一项重要的汽车主动安全技术[3],必然会成为提高汽车安全性能的技术之一。AEB系统检测并识别车辆前方的潜在危险情况,并在紧急情况下协助制动或自动紧急制动[4]。2014年,Euro NCAP正式将AEB系统纳入新车评价规程[5-6]。2016年,中国新车评价规程 CNCAP完成了AEB系统测试评估方法的规程制定[7],2018年,AEB系统测试正式纳入新车评价规程,其中包括AEB针对追尾碰撞和行人保护两方面的性能评价[8-11]。在AEB系统测试中,测试场景必须与实际道路交通事故场景相对应[12]。因此,采用真实的汽车与两轮车交通事故场景用于AEB两轮车系统测试的测试场景是必要的。
目前,各国对AEB系统测试场景的研究主要集中在车- 车工况和车- 人工况,对汽车与两轮车工况鲜有研究[13-16]。刘颖等人以我国实际道路交通事故工况作为数据来源,通过聚类分析方法分析实际道路交通事故数据,得到5种典型的事故场景,并据此设计了适用于我国道路交通状况的AEB行人系统测试场景[17]。朱西产和李霖等人对上海地区真实交通中的自然行驶工况进行视频采集、筛选,通过聚类分析和卡方检验得到了7类典型的两轮车交通事故危险场景[12]。江丽君和刘军勇等人根据车辆运动和两轮车相对车辆运动,将事故场景分为72类,并根据各类场景的事故数量和受重伤比例,确定了6类典型的事故场景[18]。詹姆斯·列纳德等人利用聚类分析法分析了英国两个大型数据库中的案例,最终确定6类典型的事故场景,并选取其中最为常见的一类作为AEB行人系统测试的主要场景[19]。为进一步开发 Cyclist-AEB系统的测试系统,2014年,TNO启动了 CATS(Cyclist-AEB testing system)项目[20]。该项目根据欧盟国家有关两轮车事故场景测试结果的分析,提出了Cyclist-AEB系统的测试设置和测试协议[21]。2018年,Euro NCAP将Cyclist-AEB系统纳入主动安全评估系统中[22]。
由于国内的驾驶环境和驾驶员的驾驶习惯与国外存在差异,国内关于AEB两轮车系统的研究,还缺乏完善的、考虑具有中国特色的交通事故环境的测试场景[23-24]。因此,本文中对采集的实际交通事故数据进行筛选和分类,并利用聚类分析获得汽车与两轮车碰撞的典型事故场景,通过对两轮车运动状态、汽车车速和两轮车车速3个参数进行事故伤亡程度分析,结合事故样本数,确定每类事故场景的详细参数特征,设计了 AEB两轮车系统的测试场景。
1 汽车与两轮车碰撞事故的数据来源与统计学分析
从2011年至2017年,本课题组已采集3 000多起我国道路交通事故,区域覆盖威海、宁波、长春、北京、佛山和成都6个城市[25]。根据事故现场信息,利用奥地利PC-Crash交通事故重建软件进行事故全过程的还原,得到包含事故中汽车车速和两轮车车速等较为完备的事故信息。本文中从项目数据库中调取了2012-2016年的事故案例,并对其中793起汽车与两轮车碰撞的事故案例进行了事故重建[26-29]。由于AEB系统是在FCW(forward collision warning)系统工作的基础上和制动系统紧密协作实现的,它只针对前方碰撞危险工况进行预警并辅助驾驶员制动;同时,考虑到我国实际交通环境,提出了以下案例选取的要求:
(1)两轮车包含自行车、电动两轮车和摩托车;
(2)汽车仅包含轿车、客车和SUV;
(3)碰撞类型为正面碰撞;
(4)排除车辆静止或倒车案例;
(5)排除停车场案例。
通过筛选,最终选取了469起汽车与两轮车碰撞事故作为研究对象,采集碰撞发生前的数据,从两轮车、汽车、道路和环境等因素对事故进行分析。469起事故中,汽车直行占64%,汽车转向占31%,其它特殊的汽车运动状态占5%。本文中两轮车运动状态都是指两轮车相对于汽车的运动状态。两轮车运动状态中,从左至右行驶占26%,从右至左行驶占25%,对向有车占20%,同向有车占17%,逆行占6%,其它特殊的运动状态占6%。由于汽车与两轮车碰撞事故场景的多元化和复杂化,本文中排除其它特殊运动状态的事故案例,对剩余的419起汽车与两轮车碰撞事故案例进行统计分析,为建立适用于我国道路交通环境的AEB两轮车系统测试场景提供参考依据。
2 汽车与两轮车碰撞事故的典型场景提取
2.1 事故场景聚类分析
本文中采用层次聚类法[30]对汽车与两轮车碰撞事故的典型场景进行提取,既可避免分析人员的主观意识对场景分类结果的影响,且具有很强的可重复性[31]。
汽车- 两轮车事故场景中参数较多,但本文的目的是分析事故发生前的场景,提取适用于AEB两轮车系统测试的测试场景。为适用于AEB系统的测试,选取如表1所示的8个参数进行分析。
在层次聚类分析中,距离计算可分为变量间距离计算、样本间距离计算和类之间的距离计算[32],分述如下。
(1)变量之间距离的计算
变量类型有名义尺度变量和连续变量。为了便于后续的聚类分析,将8个参数设置为名义尺度变量。名义尺度变量是指没有数值关系,但具有类别之分的变量。将每个变量都采用数值表示,最终得到这8个变量的取值,如表1所示。变量取值相同时,变量之间距离为0;变量取值不同时,变量之间距离为1。如两轮车运动状态中,“从左至右行驶”和“对向有车”两参数特征取值分别为1和4,虽然数值差异为3,但是变量之间的距离为1。

表1 汽车- 两轮车事故的场景参数与参数特征
(2)样本之间距离的计算
本文中采用欧氏距离来计算样本之间的距离。首先,将n个事故样本看成n个类,每个类包含一个样本,每个样本有m个样本变量。在下面的聚类过程中,将每个样本用包含m个变量的向量来表示:

式中Xij为第i个样本中第j个样本变量的度量值。则第i个样本与第p个样本之间的距离为

(3)类之间距离的计算
在实际应用中,华德法的分类效果较好,应用也较广泛,故本文中选用华德法进行类之间距离的计算[33]。具体做法:首先计算每个类的类内样本离差平方和,然后每次缩小一类,每缩小一类,离差平方和就要增大,选择使离差平方和增加最小的两个类合并,直到聚类到所需要的类的数量为止。
设类GL中有nL个样本,XiL为类GL中的第i个样本,则类GL的类内样本离差平方和为
如果类GL和类GR合并为新类GK,同上计算,类内样本离差平方和分别为SL,SR,SK,它们反映了各自类内样本的离散程度。如果类GL和类GR相距较近,则合并后所增加的离差平方和SK-SL-SR应较小;否则,应较大。于是定义类GL和类GR之间的平方距离为

2.2 典型汽车- 两轮车事故场景提取
本文中利用SPSS软件进行聚类分析,最终得到的结果如表2所示。可以看出,第5,7,12和14类场景中两轮车运动状态特征、两轮车车速特征和汽车车速特征不明显,无法提取特定的碰撞事故场景,因此,本文中不对这4类场景做进一步的分析。除这4类场景外,其它场景占总样本的80.9%。从表2可知,大部分事故发生在照明好的情况下,约占总样本的3/4;发生在路口的事故较为突出,约占总样本的4/5;汽车直行事故约占总样本的3/5;在大部分事故中,仅46起事故的驾驶员视野被遮挡,障碍物可能是汽车车身、其它车辆或道路旁的建筑。
通过分析聚类结果总结出各类场景的详细参数特征,如表3所示。从表3可知,各类场景的两轮车运动状态特征、两轮车车速特征和汽车车速特征覆盖范围广,导致场景与场景之间的重叠率大。例如,除第2类场景外,其它场景的两轮车运动状态特征都包含2种或2种以上;各类场景的两轮车车速特征和汽车车速特征涵盖了约3个速度段。这样的事故场景不具有典型性,且会给后续AEB两轮车系统测试场景的设计带来困难。为解决这些问题,本文中将对各类场景中两轮车不同的运动状态、不同汽车车速和不同两轮车车速进行事故伤亡程度的分析,并结合各参数特征下的事故样本数量,准确地选取每类场景中汽车车速、两轮车车速和两轮车运动状态的参数特征。
3 汽车与两轮车碰撞事故场景的参数分析
本文中根据事故伤亡程度对聚类分析得出的11类典型事故场景做进一步的分析。将事故伤亡程度划分为 3个等级:轻微(AIS1-AIS2)、严重(AIS3-AIS5)和致命(AIS6)。本文中事故伤亡程度包括汽车驾驶员、乘员和骑车人的伤亡程度。
在两轮车不同的运动状态、不同汽车车速或不同两轮车车速下,事故伤亡“严重”或“致命”的样本越多,说明事故伤亡越严重;事故伤亡越严重,且事故样本越多,说明该参数特征在此类场景中越典型。同时,在某类场景中,若某参数特征下的事故样本数量大于该场景中事故伤亡严重的参数特征下的事故样本数量,则该参数特征在此类场景中也较典型。因此,在两轮车不同的运动状态、不同汽车车速或不同两轮车车速下,根据事故伤亡程度和事故样本数量,选取事故伤亡程度“严重”和“致命”样本较多的和事故总样本大于事故伤亡严重的参数特征下的样本数量的参数特征作为相应场景对应参数的参数特征。
各类场景中两轮车不同的运动状态、不同汽车车速或不同两轮车车速下的事故伤亡程度分别如表4~表6所示。表格中加粗部分表示在某类场景中,事故伤亡程度为“严重”或“致命”样本较多的占比。
(1)两轮车运动状态的确定
从表4可知,在第1类场景中,两轮车“从右至左行驶”的事故样本数量大于两轮车“从左至右行驶”的事故样本数量,但事故伤亡“严重”的样本最多的却是两轮车“从左至右行驶”。因此,第1类场景中两轮车运动状态选取“从左至右行驶”和“从右至左行驶”。除第13类场景外,其它各类场景中的两轮车运动状态特征皆可根据上述标准提取。在第13类场景中,根据上述标准可选出“从右至左行驶”和“对向有车”作为该类场景的两轮车运动状态特征,但“对向有车”的事故样本占比为8.1%,意味着在第13类场景下发生10起事故,其中“对向有车”事故不到1起,因此,“对向有车”不能作为该场景的典型两轮车运动状态特征。
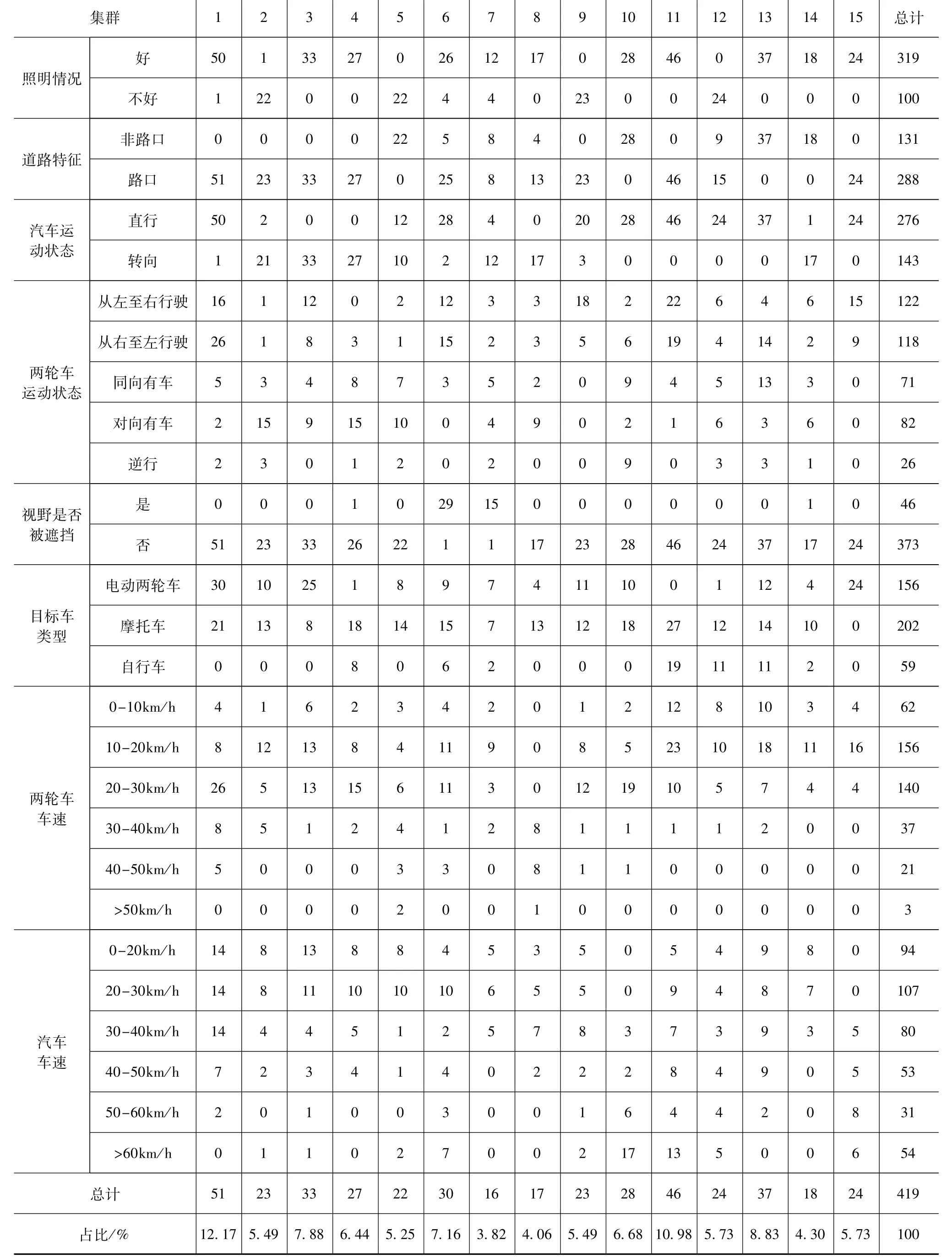
表2 聚类分析样本数量分布结果

表3 各类典型事故场景的参数特征
(2)两轮车车速的确定
从表5可知,各类场景中的两轮车车速特征皆可根据上述标准提取。例如,在第8类场景中,两轮车车速在40-50km/h时,事故伤亡最为严重,“严重”的样本占第8类场景总样本的11.76%;两轮车车速在30-40km/h时,事故样本占该场景总样本的47.06%,但该速度段的事故样本数量并未大于“40-50km/h”速度段的事故样本数量,因此,第8类场景选“40-50km/h”速度段作为两轮车车速特征。同理,在第3类场景中,两轮车车速在20-30km/h时,事故伤亡最为严重;两轮车车速在10-20km/h时,事故样本数量较多,但并未大于“20-30km/h”速度段的事故样本数量,因此,选“20-30km/h”速度段作为第3类场景的两轮车车速特征。
(3)汽车车速的确定
从表6可知,除第6,9和13类场景外,其它各类场景的汽车车速特征皆可根据上述标准提取。在第6类场景中,根据上述标准可选取出“20-30km/h”,“30-40km/h”和“>60km/h”作为该类场景的汽车车速特征,但是,“30-40km/h”的事故样本占比为6.66%,意味着在第6类场景下发生10起事故,其中“30-40km/h”事故不到 1起,因此,“30-40km/h”不能作为该场景的典型汽车车速特征。同理,第9类场景中的“40-50km/h”和第13类场景中的“50-60km/h”都不能作为该场景的典型汽车车速特征。
根据上述标准确定了各场景中典型的两轮车运动状态、两轮车车速和汽车车速,最终得到各类场景中典型的参数特征,如表7所示。
4 AEB系统两轮车测试场景的设计
本文中将最常见的事故场景用于定义AEB系统两轮车测试的主要测试场景,而其它次要测试场景主要考虑某些与主要测试场景不同的参数特征。在次要测试场景中,部分参数特征与主要测试场景相似,不相似的参数特征在主要测试场景的基础上进行变化。
主要测试场景设计为在照明良好的情况下,一辆汽车直行通过路口的场景。从表7可知,第1,8,11和15类事故场景皆为此类场景。在主要测试场景的基础上,第1个变化是汽车直行改为转向的第3类和第4类事故场景。第2个变化是基于第2类事故场景,照明变为不好时一辆轿车在路口转向的场景。第3个变化是基于第9类事故场景,照明变为不好的情况。第4个变化是基于第6类事故场景,从汽车驾驶员的角度看两轮车被遮挡的情况。第5个变化是基于发生在平直道路上的第10类和第13类事故场景,将道路特征由路口变为非路口。通过5种变化,得出如表8所示的5类次要测试场景。

表4 两轮车在不同运动状态下的事故伤亡程度

表5 两轮车在不同车速下的事故伤亡程度

表6 汽车在不同车速下的事故伤亡程度

表7 进行事故伤亡程度分析后各类典型事故场景的参数特征

表8 AEB两轮车系统的测试场景
从表7中观察,各类事故场景的两轮车的类型、运动状态与车速和汽车车速差异较大。为给出测试场景中两轮车类型、两轮车运动状态、两轮车车速和汽车车速4类参数的特征,结合表7的事故场景,针对每类测试场景,设计出不同两轮车的类型、运动状态与车速和相对应的汽车车速。总结每类测试场景中汽车- 电动两轮车碰撞、汽车 摩托车碰撞和汽车自行车碰撞的具体测试场景参数特征分别如表9~表11所示。
5 讨论
AEB系统作为主动安全技术之一,必须通过真实道路交通事故数据的不断积累,进一步提高系统测试的实际应用价值。本课题组的事故数据都是经过专业事故调查人员现场调查得到,事故调查组对事故现场进行测量,绘制事故现场草图,采集事故环境和事故车辆的具体信息,并根据受害者的临床报告收集受害人的损伤信息,可确保整体事故数据不受区域的影响,确保事故现场评估的准确性。事故场景通过聚类分析方法得出,场景参数特征的提取均有相应的筛选标准,确保了结果的客观性。
汽车与两轮车碰撞事故不同于汽车与汽车碰撞事故,也不同于汽车与行人碰撞事故,其场景参数更多元,两轮车运动状态更复杂。通过聚类分析获得的事故场景中,每类场景的汽车车速和两轮车的车速与运动状态较复杂,不具有典型性。为使事故场景更典型,本文中对汽车车速、两轮车车速和两轮车运动状态3个复杂参数进行了事故伤亡程度分析,结果选取了事故伤亡程度“严重”与“致命”样本较多的和事故总样本数大于事故伤亡严重的参数特征下的样本数的参数特征作为相应场景对应参数的参数特征。例如,聚类结果分析后,第4类场景中,汽车车速、两轮车车速和两轮车运动状态3个复杂参数的特征分别选取为“0-40km/h”,“10-30km/h”和“对向有车与同向有车”。通过事故伤亡程度分析,将汽车车速、两轮车车速和两轮车运动状态3个复杂参数的特征分别选取为“20-40km/h”,“20-30km/h”和“对向有车”,使事故场景更加典型。

表9 汽车- 电动两轮车碰撞的系统测试场景
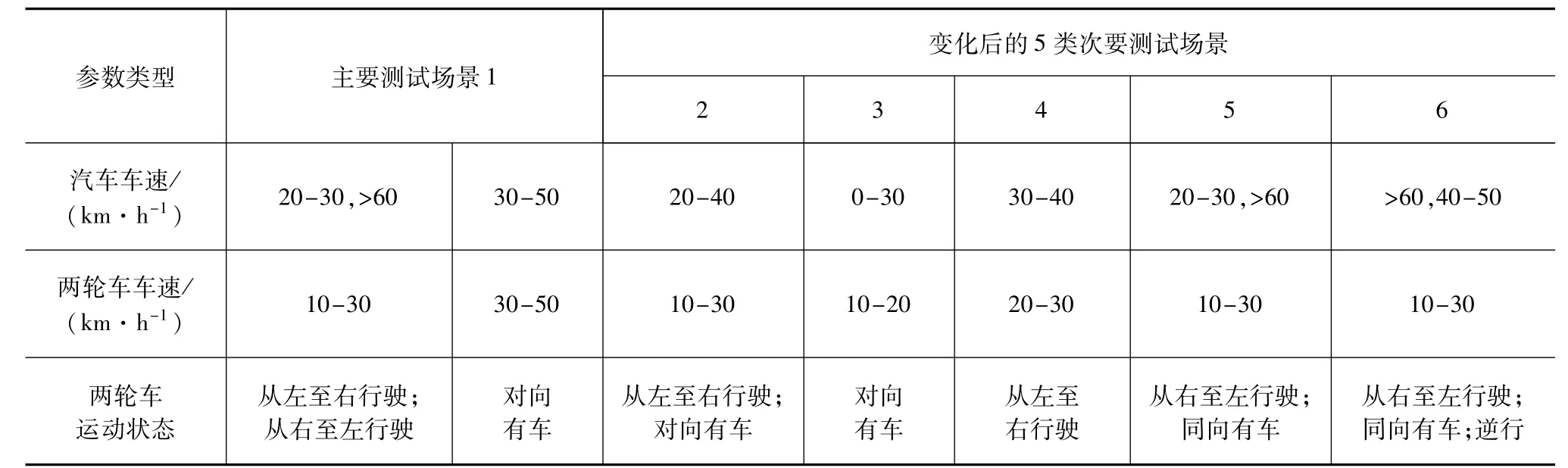
表10 汽车 -摩托车碰撞的系统测试场景
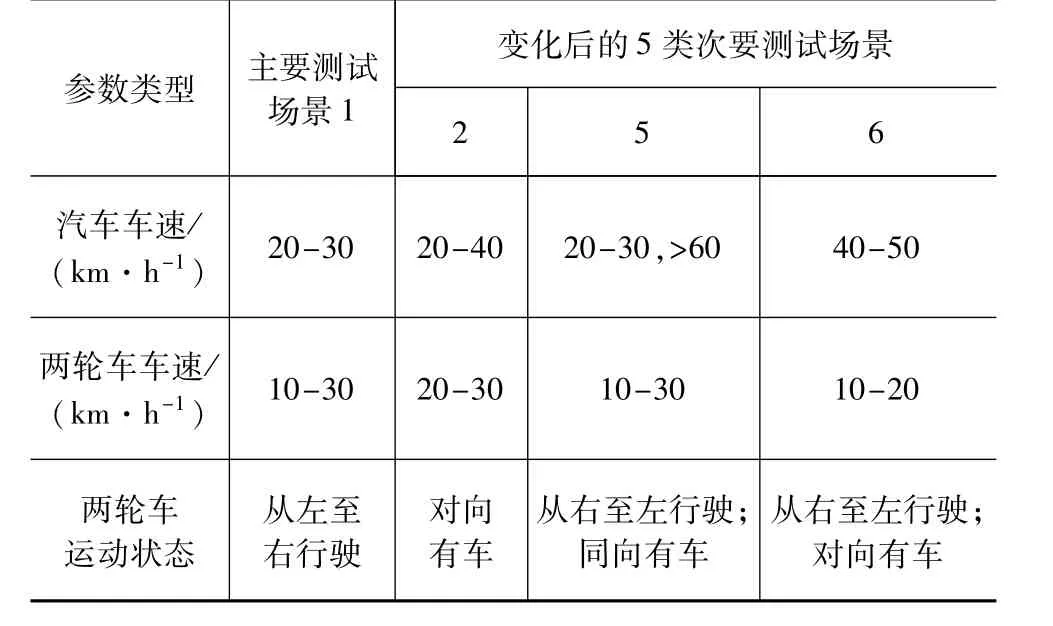
表11 汽车- 自行车碰撞的系统测试场景
AEB两轮车系统测试需要考虑的不仅仅是事故数据和事故场景,还有测试场景的设计。AEB两轮车系统测试场景的设计过程不是机械的计算过程。首先,定义一个具有最大样本量的事故场景作为主要测试场景,然后,通过变换场景参数特征考虑不常见的事故条件,这会比指定一套完整的新的测试条件更适合于AEB两轮车系统测试。选取所有事故中最常见的事故场景作为主要测试场景的方案,恰好与这种方法兼容。设计测试场景的目的是说明一种与事故场景结合的方法,同时,产生一组合适的测试场景。从测试的角度看,变换场景参数特征的顺序是以最简便的测试顺序为依据进行变化。下面详细说明以此方法设计测试场景的原因。
在所有事故场景中,第1类相对较多,包含51例事故,占12.17%。主要测试场景的特征明确指出:照明情况、道路特征、汽车运动状态和驾驶员视野。第1个问题是汽车直行或转向。转向事故143例,占34%。这个占比较大,不能忽视。第2个问题是照明条件,第2类和第9类事故场景恰好提供了照明不好的场景。天气晴朗的白天照明情况好,而在雨、雾、雪等恶劣天气条件下或在夜晚照明情况都不好。在AEB两轮车系统测试中,难以实现诸如雨、雾和雪等恶劣天气条件,是否可以夜晚作为测试条件完成所有照明不好的场景测试,这一问题值得商榷。第5类测试场景代表了汽车驾驶员视野被遮挡这一特殊的事故形态。第6类测试场景主要测试事故发生在非路口时AEB两轮车系统的有效性。
不同两轮车类型对事故伤亡程度有一定的影响,因此,在AEB两轮车系统测试中,应该为电动两轮车、摩托车和自行车分别设计不同的两轮车模型,进行碰撞测试。在设计AEB两轮车系统测试场景时,每类测试场景都分别列出不同两轮车类型的测试。
6 结论
本文中对课题组数据库中两轮车事故案例进行筛选、分类,利用SPSS软件进行聚类分析,获得11类典型的汽车与两轮车事故场景。在选取参数特征时,发现汽车车速和两轮车的车速与运动状态的参数特征较复杂,无法准确选取每类场景中的上述参数特征。因此,本文中根据事故伤亡程度和各类场景中两轮车的不同运动状态、不同汽车车速和不同两轮车车速的事故样本数,准确地选取每类场景中汽车车速、两轮车车速和两轮车运动状态的参数特征,得出11类典型的汽车与两轮车事故场景的详细描述。最后,将最常见的事故场景用于定义AEB两轮车系统测试的主要测试场景,其它次要测试场景在主要测试场景的基础上进行变化。主要测试场景设计为:一辆汽车在照明良好的情况下直行通过路口,通过变换照明情况、道路特征、汽车运动状态和驾驶员视野,得到5类次要测试场景,并在每类测试场景中都分别列出不同两轮车类型的测试。
由于我国的两轮车事故情况较国外更复杂、更多元化,因此,针对我国汽车与两轮车碰撞事故案例典型事故场景的研究对开发我国特殊场景的主动安全系统测试具有重要的参考意义。本文中将最常见的事故用于定义主要测试场景,并以最简便的测试顺序为依据变换参数特征。这种既不是机械的算法计算,也不是多个场景单次测试的方法,兼顾了最小测试次数与最多事故场景之间的矛盾,使之达到一种平衡。本文中设计的测试场景客观真实,为未来AEB系统两轮车测试提供依据。
