电动公交客车增程器开关控制策略和等效能耗最小化策略优化*
2019-01-29楼狄明谭丕强胡志远
徐 宁,楼狄明,谭丕强,胡志远
(同济大学汽车学院,上海 201804)
前言
现阶段,纯电动客车存在成本高、电池寿命衰减快、续驶里程短等劣势,难以在公交领域大范围推广。而配备高效柴油机发电机组的增程式电动公交客车,成本较低,相对并联和混联式结构其控制简单,且具有较高的节油潜力,是一种现阶段较为理想的传统客车替代方案[1-4]。
增程式电动汽车首先在纯电动模式行驶,当动力电池组荷电状态(SOC)低于一定值时,进入增程模式。增程式电动公交客车每天在200~300km的运行里程中,都存在较大比例的增程模式,即电量维持阶段。
在电量维持阶段增程式电动汽车多采用单点恒温器开关式能量管理策略[4-7],增程器开关状态只与动力电池组SOC相关,当SOC低于设定最小值SOCmin时开启,在高于设定最大值SOCmax时则关闭,增程器工作在效率较高的单个点上,由于驱动电机需求电功率的波动,存在能量从发动机到发电机到储能系统再到驱动电机的多级传递过程,能量损失增加,能量利用率下降,同时其电池组充放电也增加,最终导致其节油率降低和电池组循环寿命衰减加快。能量管理策略方面,尽管在单点式能量管理策略下,发动机工作在最优效率点,但无法取得发动机效率和储能系统充放电效率的最优,为此可采用实时ECMS策略进行实时最优寻解,但对于增程式电动系统,其储能系统相对非插电混合动力系统容量较大,其ECMS策略也需要进行适当的优化。
本文中在原增程器开关控制策略的基础上增加中重制动工况关闭等触发,并针对增程式电动公交客车改进了ECMS策略,从而从增程器开关控制策略和能量管理策略两个方面来优化增程式电动公交车电量维持阶段性能。
1 研究对象
研究对象为一款长12m的城市客车,其整车参数如表1所示。驱动电机采用某永磁同步电机,其特性参数如表2所示。动力电池组采用磷酸铁锂电池组,其参数如表3所示。
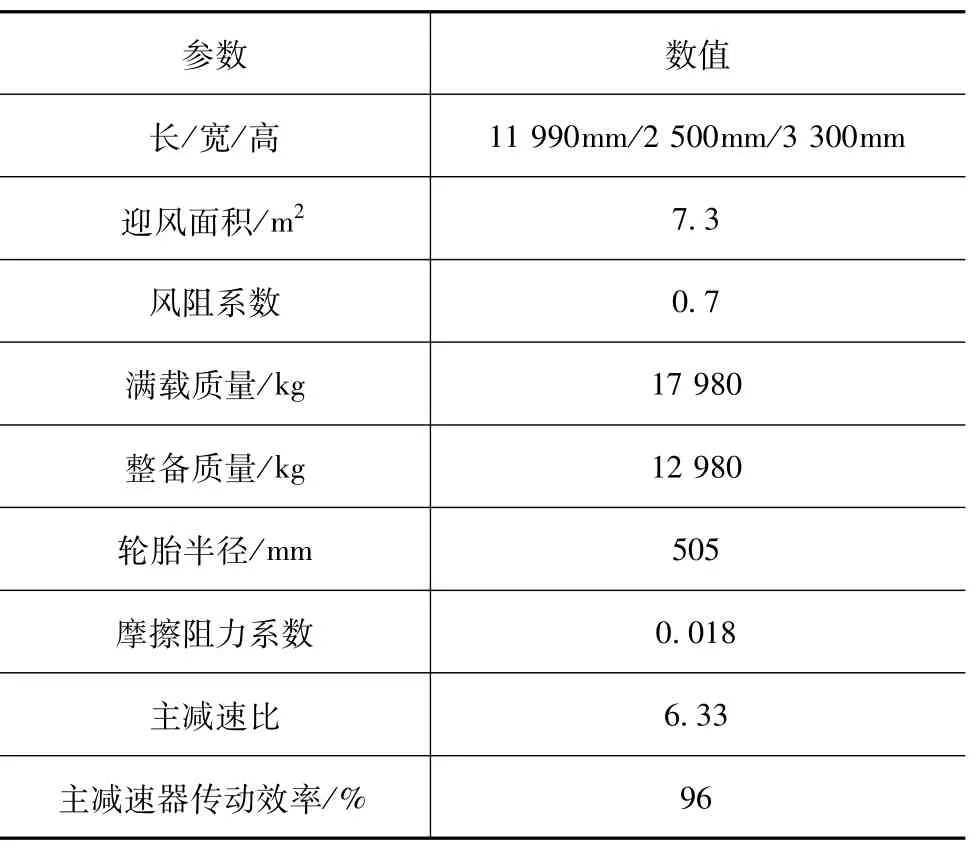
表1 增程式电动公交车整车参数
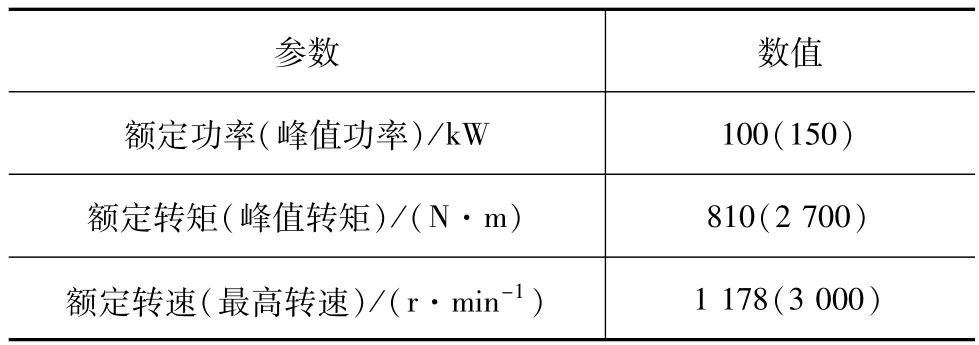
表2 驱动电机参数
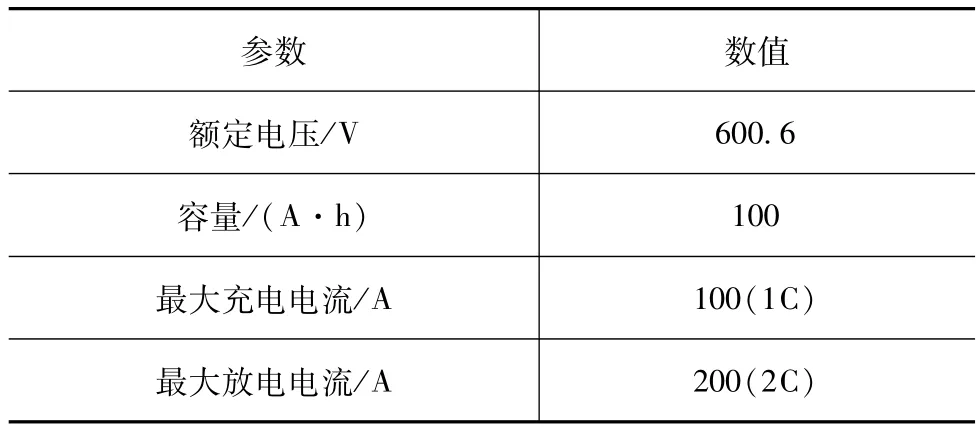
表3 动力电池组参数
增程器采用的是某2.0L四缸柴油机,最大功率为71kW,对应转速为3 000r/min。增程器系统最终燃油消耗率如图1所示,其中增程器系统燃油消耗率最小值为 224g/(kW·h),对应转速为 2 000r/min,转矩为246.5N·m,输出电功率为48.6kW。
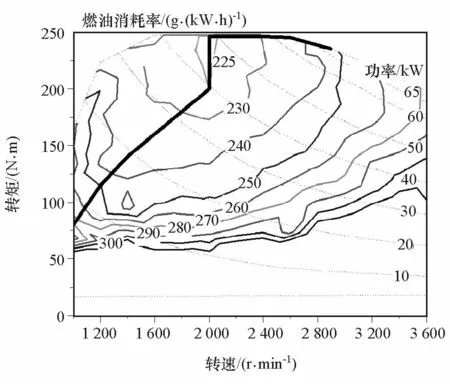
图1 增程器系统油耗图
2 模型搭建与能量管理策略仿真优化
仿真模型如图2所示。采用AVLCruise与Simulink联合前向建模,其中驾驶员模型、循环工况模型和整车动力学模型等在AVL Cruise中搭建,而基于功率流的整车控制策略模型在Simulink中搭建,通过 CRUISE Interface进行信号交互,实现联合仿真。
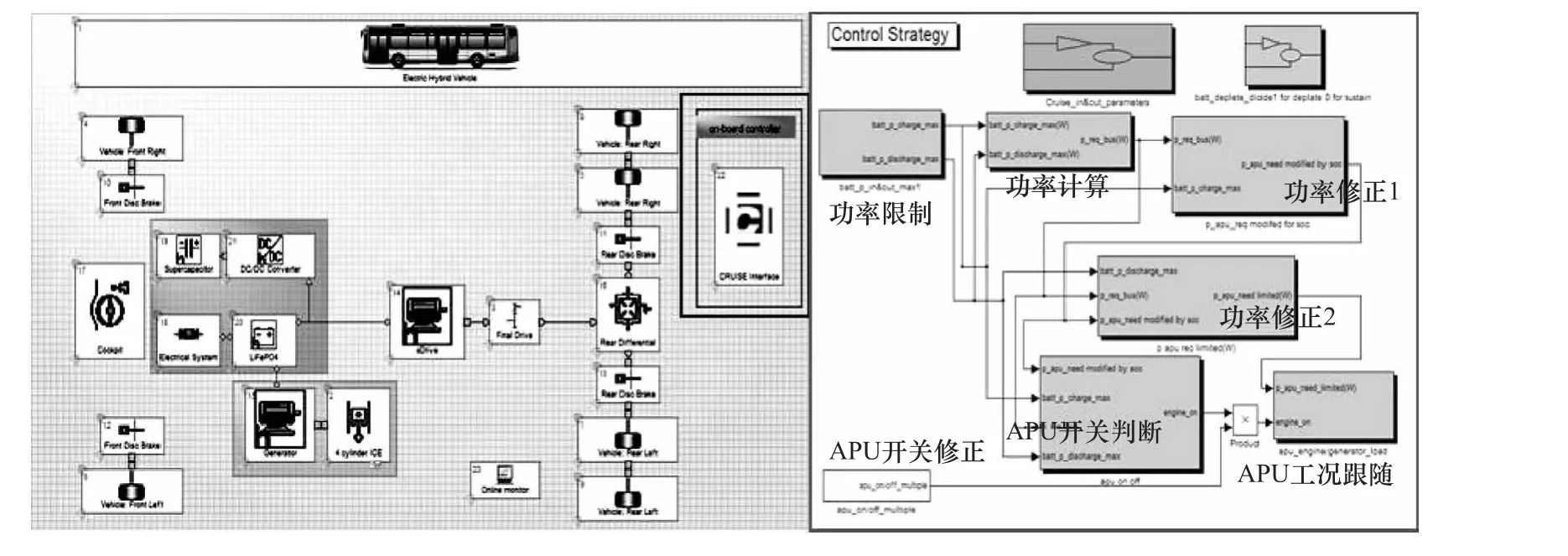
图2 AVL CRUISE与Simulink联合仿真模型
仿真过程采用《重型混合动力电动汽车能量消耗量试验方法》[9]推荐中国典型城市公交工况循环(CCBC)。仿真过程采用6个CCBC循环组成的仿真循环,并选取储能系统电量波动最小的一个循环作为电量平衡运行阶段,重点分析其油耗和锂电池组循环充放电特性。
参考《重型混合动力电动汽车能量消耗量试验方法》[10]中推荐的电量油耗折合公式进行折算到燃油消耗体积Vfuel,单位为L,如式(1)所示。

式中:Ek为储能系统电量变化量,kW·h;Dfuel为燃料密度,g/cm3;Qfuel-low为燃料低热值,J/g;ηeng和 ηgen分别为发动机和发电机效率。
由于锂电池组充放电倍率较小,用其循环累计充电量的大小来近似衡量电池循环寿命[11]。定义锂电池组循环充电系数cbatt_charge为

式中:Qbatt_charge_total为对应时间内累计充电量,kW·h;Qbatt_charge为锂电池额定容量,kW·h;S为行驶里程,km。
2.1 电量维持阶段增程器开关控制策略优化
增程器开关控制策略中首先增加了大驱动功率需求时开启增程器的策略来补偿高速及加速过程驱动电机电功率需求。为避免制动能回收潜力被占用,在中重制动过程,当储能系统最大充电功率绝对值小于增程器输出功率和驱动电机最大制动回收功率之和时,将关闭增程器。但增程器将较频繁地停机,并会导致锂电池组SOC长期处于较低状态,在某些工况可能出现过放电的可能。为保证电量维持阶段锂电池组SOC波动范围不频繁低于SOCmin,在电量维持阶段增加了较大驱动功率需求时预测开启增程器策略。最终增程器开关控制策略由4部分组成:基于SOC上下限的基本开关策略、大驱动功率需求时开启触发、较大驱动功率需求时预测开启触发和中重制动关闭触发,如图3所示。同时,为防止增程器起停太过频繁,也将基于SOC上下限的基本开关控制策略中的输入量上次开关状态定义为优化后的增程器开关控制策略上次开关状态输出。
优化增程器开关控制策略前后增程式电动公交客车各方面性能对比如图4和图5所示。从图4和图5中可以看出,优化增程器开关控制策略后,增程器起停次数增加,且在较大驱动工况会开启,在中重制动工况会关闭,这一方面使锂电池组SOC波动减少到约1.7%,因此动力电池组循环充放电减少,另一方面制动过程锂电池组的充电功率不再被增程器发电功率占用,而更多地用于公交客车制动能量的回收,如图6所示。
图7和图8分别为优化增程器开关控制策略前后驱动电机制动功率分布和锂电池组充放电功率分布情况。从图7和图8中可以看出,优化增程器开关控制策略后增程式电动公交客车制动能量回收潜力显著提升,每次制动过程驱动电机电功率都能达到储能系统最大充电功率和当前驱动电机最大制动回收电功率的最大值。
仿真结果表明,优化增程器开关控制策略后,折合百公里油耗从 38.49降低到 34.59L,降低了10.1%,锂电池组循环百公里充电系数也从1.79降低到1.13,降低了36.7%。对应的能量流动对比分析结果如图9所示。
从图9中可以看出,优化增程器开关控制策略之后,锂电池组充放电消耗减少,仿真循环下储能系统消耗降低了45%,但占比仍然较高,达3.2%。同时制动消耗也因制动能量回收的增加而显著减少。
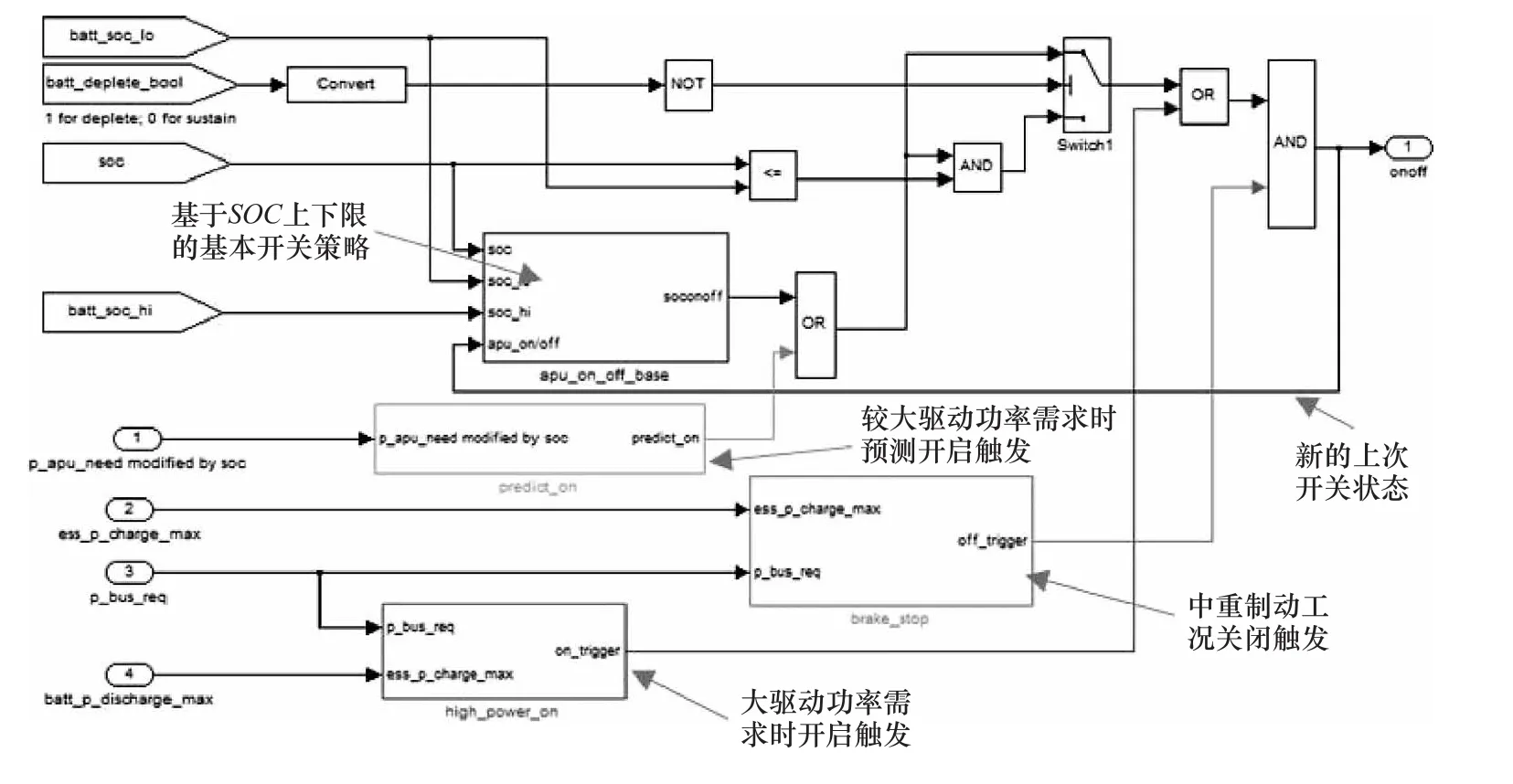
图3 优化后增程器开关控制策略示意图
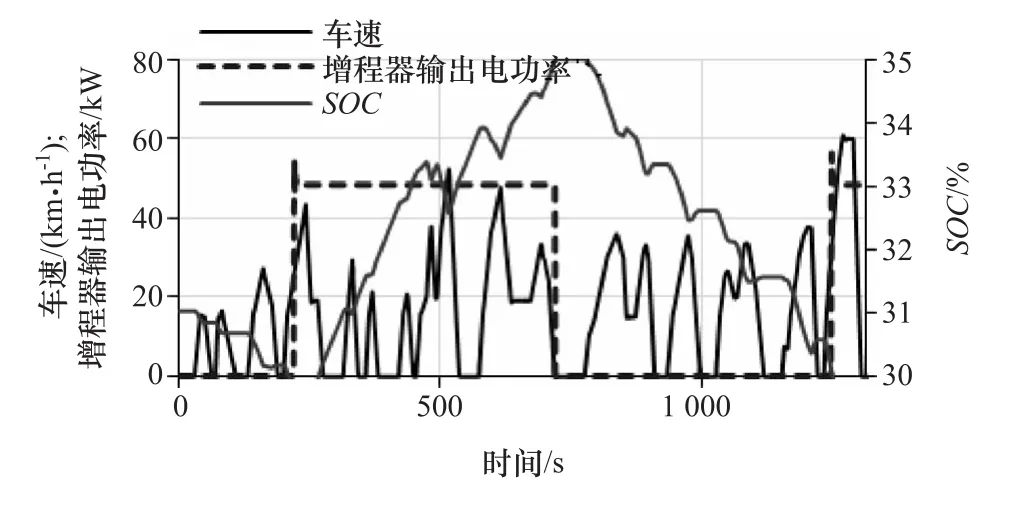
图4 原增程器开关控制策略下增程器开关状态和SOC变化趋势仿真结果
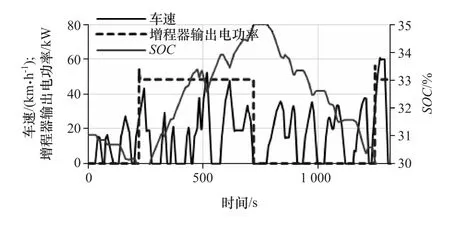
图5 优化增程器开关控制策略后增程器开关状态和SOC变化趋势仿真结果
2.2 实时优化的等效燃油消耗最小策略与改进
等效燃油消耗最小策略需要建立当前时刻储能系统消耗的电能与增程器未来时刻补偿这些能量而消耗的燃油之间的等效关系,对每一时刻增程器实际油耗与储能系统等效油耗的总和进行优化,使其最小,并保证储能系统SOC维持在目标值附近。

图6 优化增程器开关控制策略后驱动电机电功率分配特性
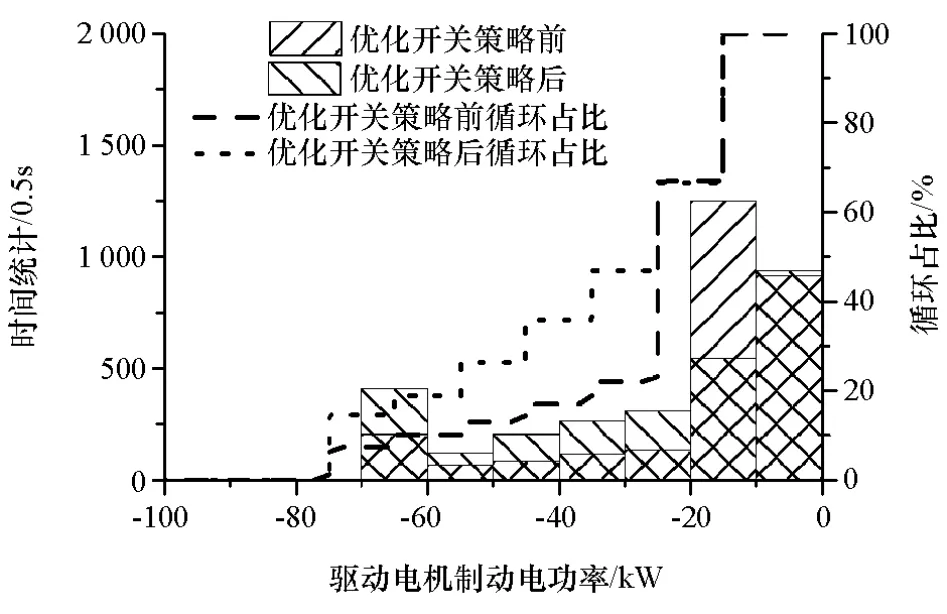
图7 优化增程器开关控制策略前后驱动电机制动功率分布
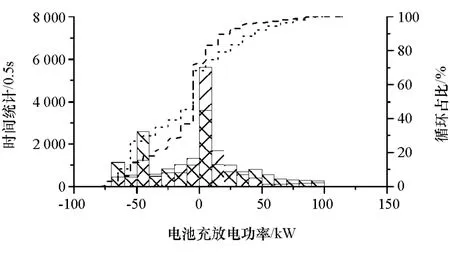
图8 优化增程器开关控制策略前后锂电池组充放电功率分布
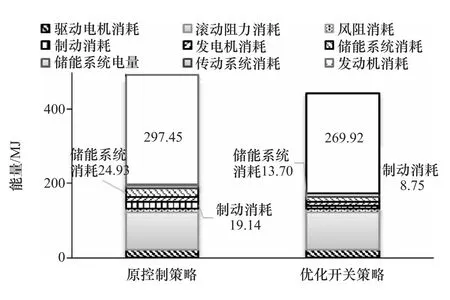
图9 优化增程器开关控制策略前后能量流动对比
等效燃油消耗最小策略的目标函数为

从储能系统角度出发,工况可分为储能系统未来补偿工况和未来消耗工况。储能系统未来补偿工况的储能系统瞬时等效燃油消耗为

式中:Pess_dis和ηdis分别为该时刻储能系统瞬时放电功率和放电效率g分别为未来补偿过程增程器平均燃油消耗率和储能系统平均充电效率。
储能系统未来消耗工况的储能系统瞬时等效燃油消耗为

式中:Pess_chg和ηchg分别为该时刻储能系统瞬时充电功率和充电效率s分别为未来消耗过程增程器平均燃油消耗率和储能系统平均放电效率。
同时,单纯依靠改进ECMS无法实现SOC稳定,因此需要增加平衡补偿函数f(SOC):
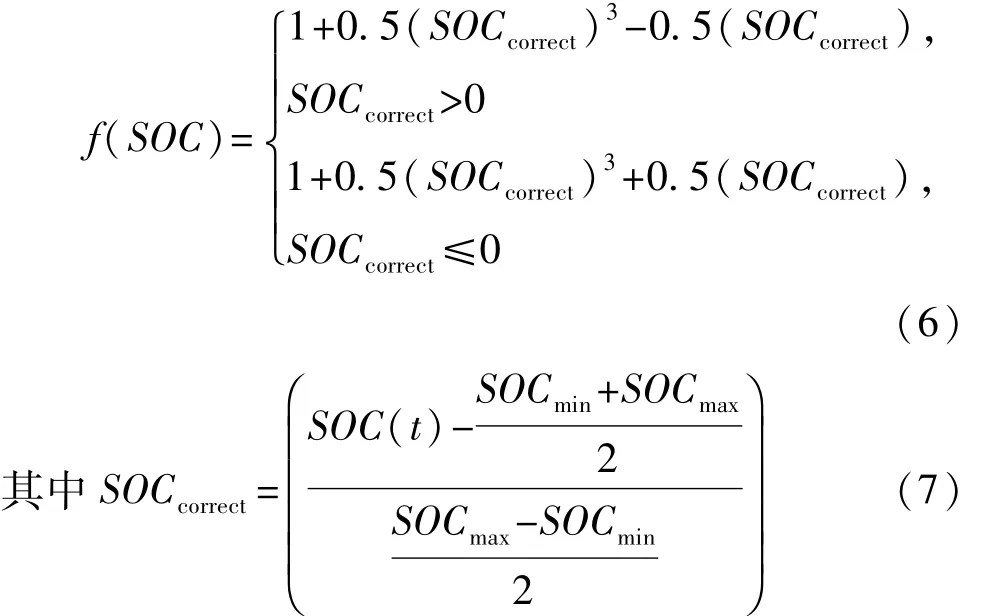
式中:SOC(t)为当前时刻的 SOC;SOCmax和 SOCmin分别为电量维持阶段的上下限值,电量维持阶段需要保证。
对于混合动力汽车,储能系统容量较小,常进行制动过程的能量回收修正,其将部分代替未来锂电池组电能补偿时燃油消耗[12-13],能起到在驱动工况向储能系统未来补偿策略倾斜的作用,其目的是为后续制动过程提供足够的储能系统容量。
但对于插电增程式电动汽车,无论在储能系统未来补偿和未来消耗模式,储能系统可用容量都较高,不影响制动能量回收,且在优化增程器开关控制策略后更明显,所以将不考虑制动能量回收修正。此外,对于增程式电动公交客车,增程器输出功率较低,在较大驱动工况无法满足驱动电机功率需求,因此其储能系统未来消耗模式所占的时间比例会较低,而未来补偿模式所占的时间比例会较高。
最终等效燃油消耗最佳目标函数为

式中:Papu_max和Papu_min分别为增程器输出功率上下限值;Pess_chg_max和Pess_dis_max分别为储能系统最大充放电功率。
最终改进后ECMS的控制框架如图10所示。

图10 改进ECMS系统框图
等效燃油消耗最小策略下,增程器开关状态和SOC变化趋势仿真结果如图11所示。从图11中可以看出,改进ECMS下增程器输出功率波动较大,多数工况能跟随驱动电机功率需求,但储能系统SOC波动情况显著减小。

图11 改进ECMS下增程器开关状态和SOC变化趋势仿真结果
图12 所示为改进ECMS下驱动电机电功率分配特性。从图12中可以看出,改进ECMS下,增程器输出功率基本能跟踪驱动电机电功率需求,在功率需求较大时,增程器输出功率为最大输出功率65kW。
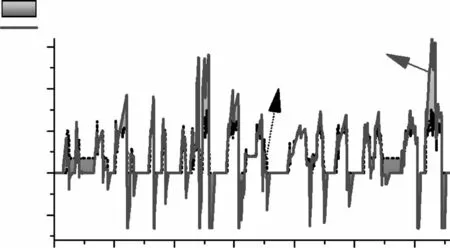
图12 改进ECMS下驱动电机电功率分配特性
最终,进一步采用改进ECMS后增程式电动公交客车百公里油耗进一步降低,达到34.20L,相对优化增程器开关控制策略后单点能量管理策略降低了1.1%,锂电池组循环充电系数降低更明显,降低了多达35.4%。
图13所示为改进ECMS下能量流动分析图。
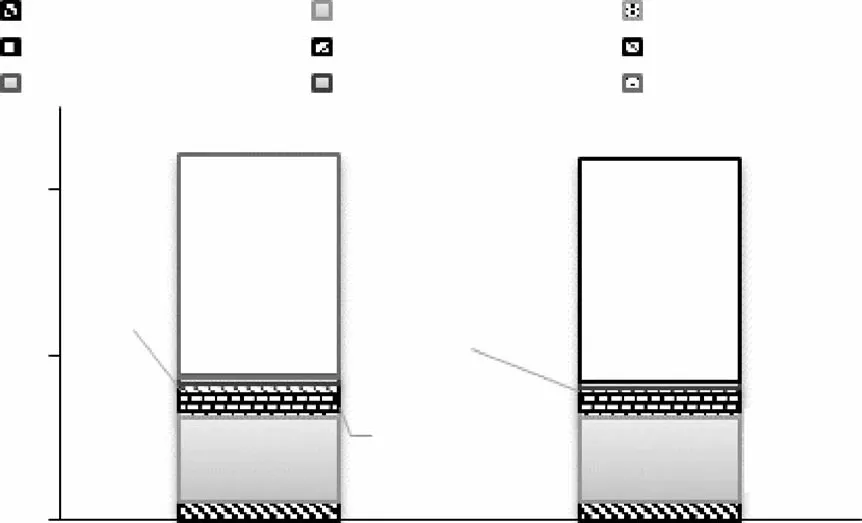
图13 改进ECMS下能量消耗分配
从图13中可以看出,采用改进ECMS后,尽管发动机消耗和发电机消耗都有所增加,但减少了动力锂电池组大功率放电工况比例,并使动力锂电池组充放电深度减少,储能系统能量消耗也因此显著减少,此外小制动工况增程器不关闭时改进ECMS下增程器输出功率较小,可进一步增加制动能量回收,减少制动消耗。可见,改进ECMS下可以显著减少动力锂电池组大功率充电比例,从而减少动力锂电池组低效率充放电工况,如图14所示。
3 半实物仿真平台搭建与试验验证
3.1 半实物仿真平台搭建
用于验证增程式电动客车整车控制策略的半实物仿真平台如图15所示。从图15中可以看出,增程器为实物,驱动电机、传动系统、整车、驾驶员和道路工况等都为虚拟模型。最终将虚拟模型和整车控制策略集成在Motohawk开发板中,如图16所示。

图14 储能系统充放电功率分布图(+是放电,-是充电)
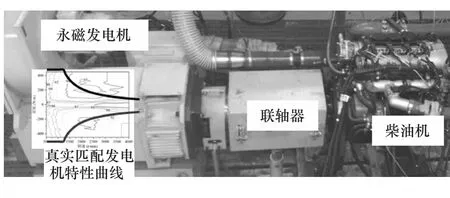
图17 增程器示意图
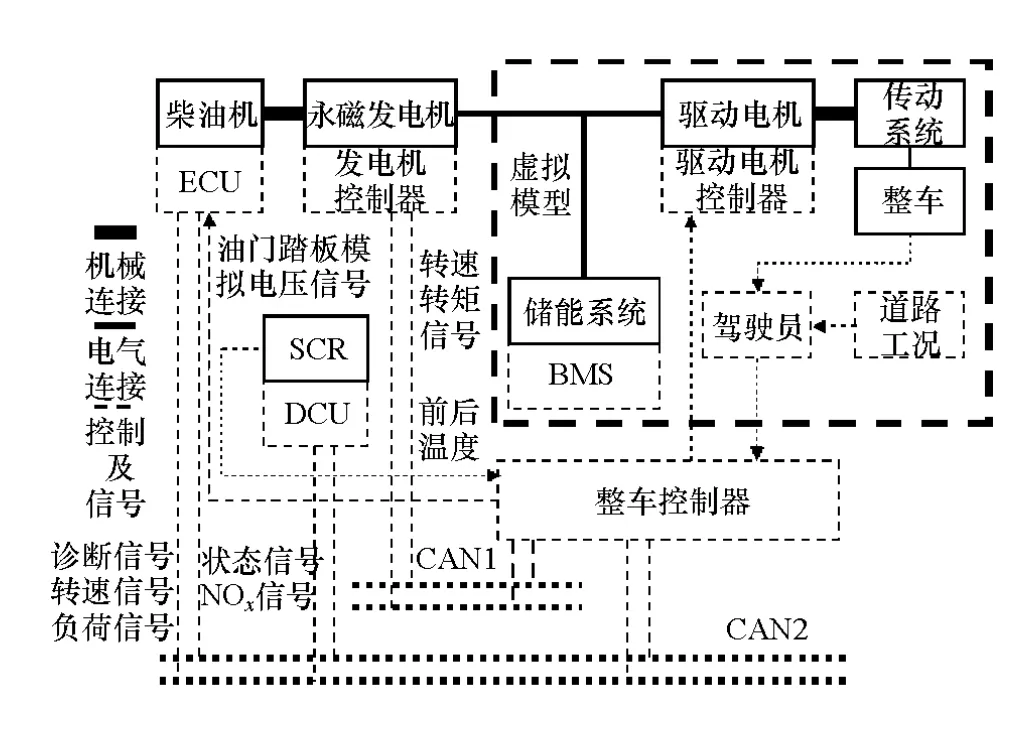
图15 半实物仿真平台示意图
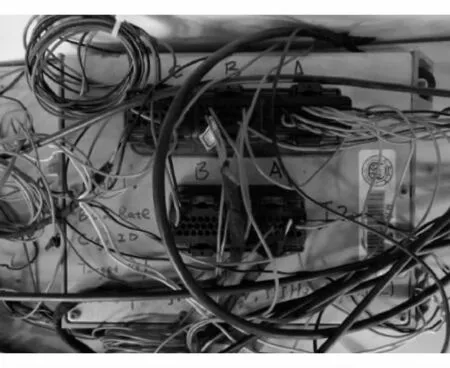
图16 Motohawk ECM-0565-128开发板
此外增程器所匹配的永磁同步电机采用某电力测功机电机替代,如图17所示,但用匹配的永磁同步电机的最大转矩和效率MAP等进行修正,从而通过在控制模型中对电机性能的限制实现了对永磁发电机的实物模拟。
3.2 优化策略试验验证
最终增程器开关控制策略优化前后以及改进ECMS下SOC和增程器输出功率仿真与试验对比如图18~图20所示。
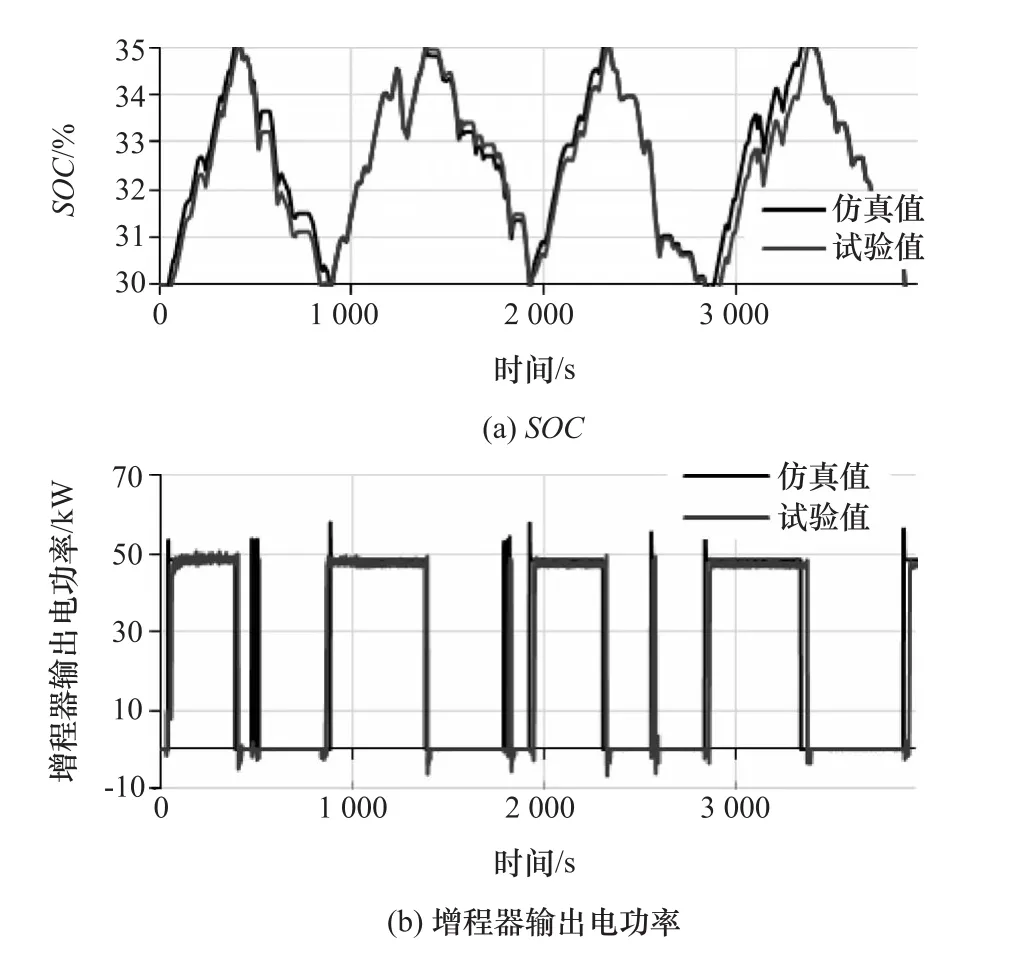
图18 增程器开关控制策略优化前SOC和增程器输出电功率变化趋势
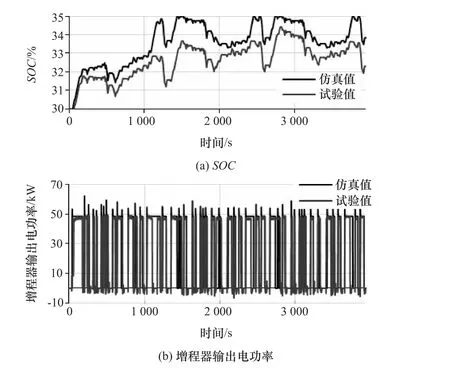
图19 增程器开关控制策略优化后SOC和增程器输出电功率变化趋势

图20 改进ECMS下SOC和增程器输出电功率变化趋势
由图可见:增程器开关控制策略优化前,SOC和增程器输出功率跟踪都较好;但增程器开关控制策略优化后以及采用改进ECMS后,SOC跟踪略有差异。这主要是因为频繁起停过程,实际过程起停及瞬态切换相对仿真有所滞后引起的,但变化趋势都符合相关增程器开关控制策略和能量管理策略下的规律。
最终百公里油耗和锂电池组循环充电系数试验结果如图21所示。

图21 增程器开关控制策略和改进ECMS下性能试验结果对比
从图21中可以看出,试验结果与仿真结果变化趋势相同。优化增程器开关控制策略后,增程式电动公交客车电量维持阶段百公里油耗和锂电池组循环充电系数分别降低了7.3%和33.0%,但增程器起停次数会有所增加。进一步采用ECMS后,百公里油耗低至35.22L,锂电池组100km循环充电系数降至0.99,相对能量管理策略优化前分别降低了2.8%和25.0%,其中油耗结果略有改善,但锂电池组循环充电系数明显减少。
4 结论
(1)电量维持阶段,优化增程器开关控制策略后,增程式电动公交客车百公里油耗和锂电池组循环充电系数分别降低了7.3%和33.0%,改善明显,但增程器起停次数会有所增加。
(2)进一步采用改进ECMS能量管理策略后,百公里油耗略有降低,循环充电系数则进一步明显减少,增程式电动公交客车百公里油耗降至35.22L,锂电池组100km循环充电系数降至0.99,相对原增程器开关控制策略和能量管理策略下,分别降低了多达9.9%和49.7%。
