某型飞机飞管计算机飞行计划轨线计算和分析
2019-01-22严淑芹
严淑芹

摘 要:某型飞机上的飞管计算机的其中一个功能是通过使用飞行员给定的航线、环境、和飞机性能参数来构建精确的从起始机场到目的机场的三维飞行轨道。这个计算得出的飞行轨道是关于飞机在垂直空间内怎样飞横向路径的复杂预测。垂直空间受巡航高度和航路点高度以及速度限制这三个因素影响。因为飞管计算机计算出的飞行剖面图是作飞行计划、空管局作汇报的基础,最重要的是,飞行剖面图还是真实的飞机控制的基础,所以,航空公司和空中交通保障人员要求可以容易地检查和分析各种各样的航线的飞行剖面图。这篇论文进行了两方面陈述,一是飞管计算机怎样进行飞行剖面的构建,二是基于PC机的Windows环境下的软件程序,这个软件程序用于帮助策划和分析航线和步骤,航线和步骤是飞机在自动飞管计算机控制下必须飞行的航线和步骤。
关键词:飞行管理 飞行剖面 横向路径 竖向路径 飞管计算机
中图分类号:TP391 文献标识码:A 文章编号:1674-098X(2019)09(a)-0006-04
飞管计算机执行各种复杂的功能,这些功能可以降低航空公司运营费用,提高安全性,并减少飞行员的工作量。这些功能包括
(1)计算最理想的燃油/时间比下的飞行剖面图并准确预测飞行轨道。
(2)通过使用各种各样的飞机导航传感器执行精确的侧向和竖向导航,各种各样的飞机导航传感器比如GPS, IRS系统。
(3)当与飞机自动驾驶和自动油门系统耦合时在每个飞行阶段执行侧向和竖向的引导。
(4)促进空/地通过ACARS网络进行通讯。
这篇论文的目的是双面性的。第一,描述飞管计算机如何计算和预测最优的三维飞行剖面图,为什么这个飞行剖面图在飞机运行时很关键。第二,介绍PC机为宿主的Windows环境下的软件程序,这个程序咱们叫它步骤设计工具。步骤设计工具可以让使用者根据飞管计算机将怎样飞步骤和航线来设计、分析、并测试步骤和航线。这个工具是怎样做到的呢?它通过把导航数据库加载器、航线编辑器、性能模型编辑器、横向竖向飞行路线绘图器和实际飞管计算机飞行计划预测软件合并到用户体验很友好的Windows环境下。
1 飞管计算机飞行剖面
1.1 飞管计算机航线
飛管计算机飞行剖面的核心是飞行员输入的或者ACARS上行链路的航线数据,这个航线就是飞机飞离起始机场到到达目的机场的航线。这个航线可以由飞行员在任意时间修改,该航线由起始机场和跑道、标准仪器离场步骤、航路点和空中航线、标准进近步骤、跑道进近步骤、以及目标跑道组成。这些信息大部分可以从导航数据库磁盘里提取出来,导航数据库磁盘是加载到飞管计算机上的,它包含的信息与空中航线图表、终端区域图表包含的信息一模一样。飞管计算机飞行计划里的航路点可以是地理上固定的(即经纬度固定),也可以是浮动的。浮动的航路点通常是计算出来的步骤航段终点,也因此该浮动航路点的实际的经纬度通常是关于风和飞机性能的函数。
1.2 飞管计算机性能模型
只给出航线数据,是不可能准确确定飞机沿着指定航线从起始机场到目的机场的三维飞行路线的,需要的额外信息是飞机性能模型和飞机环境模型。横向路径和竖向路径都是基于飞机空气动力学特征、重量、速度、引擎推力、燃油燃烧率、空气温度和压力、风、还有其他很多难以捉摸的条目等等参数的函数。其他很多难以捉摸的条目如自动驾驶/自动油门控制极限。
飞管计算机性能模型包括以下条目。
(1)737-300,-400和-500机体空气动力学特征的数字化模型,包括阻力数据和抖振速度数据;
(2)每个飞行阶段和可在上述机体上安装的引擎的每种类型对应的数字化的N1极限、推力、燃油流动模型;
(3)飞机毛重(没有燃油时的飞机重量+燃油重量);
(4)飞行员输入的或者航线指定的巡航高度;
(5)在爬升阶段飞行员选择的固定的推力减免;
(6)离场机场速度限制和目的机场速度限制。机场速度限制是适用于特定高度下的一般的速度限制。在美国,典型的情况是10000英尺下250海里;
(7)飞机爬升、巡航、下降阶段的速度计划表的数据,这些数据支持下述可由飞行员选择的性能模式:
①经济爬升、巡航和下降模式:最经济的爬升、巡航和下降速度计划表基于飞行员输入的成本指数。(成本指数是使得运营商直接的每时的运营费用与燃油费用有关的一个数字)
②飞行员输入的速度模式:飞机爬升、巡航、下降阶段的速度计划表由飞行员指定。
③必需的到达时间爬升、巡航和下降模式:速度计划表是飞管计算机计算出来的以满足在选定的飞行计划航路点处空管局指定的必需到达时间
④最大爬升率模式:爬升速度计划表会产生一个最大爬升率,这会产生最少爬升时间
⑤最大爬升角度模式:爬升速度计划表会产生最大爬升角度,这会产生最短爬升距离
⑥长巡航航程模式:巡航速度计划表产生巡航航程,等于最大巡航航程的99%。
⑦引擎失灵状态下爬升和巡航模式:推荐的爬升和巡航速度基于单个引擎运行。
(8)一组飞管计算机目标速度限制性参数,最值得注意的是机动限度,机动限度定义了相对抖振界限(绝对抖振界限是加了安全界限的),相对抖振界限限制了飞管计算机目标速度以确保在低速和高速时足够的机动性。特别地,机动限度代表在直线飞行阶段允许的最小的升重比。其他速度限制性参数包括经济爬升、巡航和下降状态下最小速率最大速率,爬升阶段最小爬升率,巡航阶段最小爬升率,最小爬升率这个参数确保了垂直机动状态下足够的推力。
1.3 飞管计算机环境模型
飞管计算机环境模型包括下述条目:
(1)所有运行高度的标准日间温度模型以及当时高度下的实际温度;
(2)每个飞行阶段飞行员输入的温度与日间温度的偏差;
(3)飞行员输入的下降高度段,在这个高度段里将应用引擎除冰功能;
(4)爬升阶段传感器感知到的大气压力,下降阶段飞行员输入的大气压力,与标准日间温度的误差是计算飞行轨道要考虑的因素;
(5)由传感器感知的当前高度下实际的风和飞行员输入的巡航高度下估计的风,这两个风构成的两点爬升风模型;
(6)基于实际的风(当飞机处于巡航高度时)和飞行员输入的顺流而下的巡航航路点的预测的风的巡航风模型;
(7)五点下降风模型,由这五点组成:巡航高度处的风(或者飞机处于下降阶段时当前高度下的实际风),多达三对飞行员输入的风/高度数据对,还有一个假设的跑道海拔高度下的零点风。
1.4 飞管计算机的横向路径的建立
给出航线、飞机性能模型、环境模型,那飞管计算机就能准确计算出三维飞行轨道。我们可以将飞行轨道分解成两部分——横向路径(从高处往下看的飞行剖面)和竖向路径(从侧面看到的飞行剖面)。横向路径和竖向路径是相互依赖的。
横向路径由步骤航段、航路点、保持模式等等要素组成。根据飞机应该怎样飞转弯处和航路点,飞管计算机会计算出这些转弯处和航路点。整个横向路径依照直行段和转弯段来定义,这些直行段或者转弯段可以开始或结束于固定地理点,也可以在浮动地理点。计算这些航线段很具有挑战性因为转弯的几何形状和若干航段终点是基于预测的飞机速度、风、还有高度的函数,这些参数反过来又是基于横向路径的函数。举个例子,一段从固定点到某高度航段的航程,通常包括在离场步骤里,这段航程详细说明了飞机转弯到一个给定的航程,飞过那个航程直到达到指定高度,然后再转到另一个航段。为了建立这个航段的横向路径,飞管计算机必须构建三段横向段:最初始转到这个航段的那个弯,直飞的那段航段(距离等于达到指定高度要经历的距离),最终要转到下一个航段的那个弯。这些航段的几何图形与飞机性能和环境条件直接关联。
横向转弯的建立取决于转弯时所需路径的改变以及预测的飞机地速。如果在转弯时所需路径改变的状况下飞机所需的最大地速是已知的,那这个转弯段可以由下面这个公式计算。
Turn Radius (ft)=(GS2)/(g·tan?),
Turn Arclength(ft)= ΔCourse·Turn Radius
GS=The maximum aircraft ground speed during the turn
g=acceleration due to gravity
?=required nominal aircraft bank angle during the turn.
為了确定飞机转弯时最大地速,飞管计算机必须估算转弯发生时的高度,然后估算飞机的目标速度,再然后估算该高度下的风。所需的转弯角度是关于所需的角范围(也就是航段改变)和飞机最大地速的函数。
构建好的横向路径非常重要因为飞管计算机将精确地控制飞机按照这个路径飞行,飞管计算机会监控跨航迹的错误并酌情给自动飞行发出滚转命令。
1.5 飞管计算机的竖向路径的建立
飞管计算机沿着横向路径计算的竖向飞行剖面分成三个飞行阶段:爬升、巡航、降落。
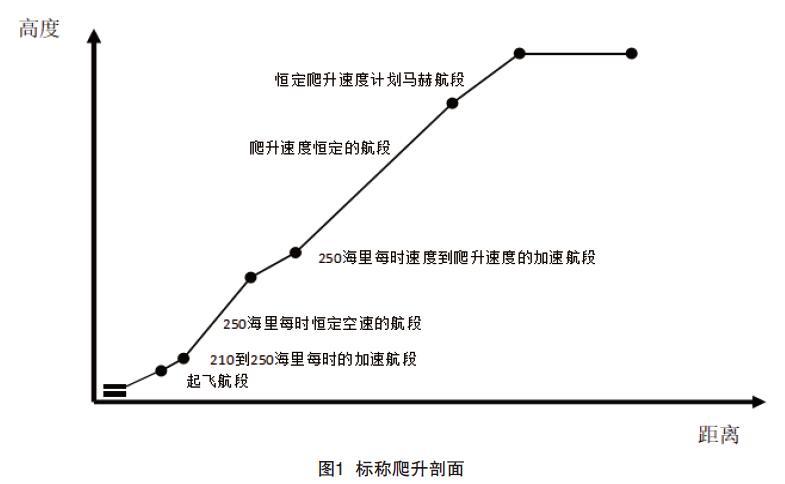
1.5.1 爬升阶段
爬升阶段的竖向路径,非常典型地由下图中的航段组成。除了这些爬升段,也有高度趋于平稳的航段,这是因为在爬升航路点有高度限制,还有目标速度加速度航段,这是因为在爬升航路点有速度限制。
爬升轨道经由很多小的基于时间的积分步骤来预测的。在每个小的积分步骤里,飞管计算机计算飞机的垂直速度,沿程速度,沿程距离,高度改变值和燃油燃烧值,这些值的计算是基于预定的飞机目标速度、风、阻力、和引擎推力的。
明确地说,一个小的爬升积分步骤里的垂直速度由下面的公式计算得到。
其中,T为平均推力(lbs),D为平均阻力(lbs),GW为飞机毛重(lbs),Tact为周边温度(K),Tstd为标准日间温度(K),g=32.174 ft/sec2,Vtrue为真空速(ft/sec),dVg为地速的微分,dh为高度的微分。
预定的飞机真实空速源自飞行员选择的爬升速度计划表和适用的机场或航路点相关的速度限制。阻力是用飞机构型、速度、转弯角度算出来的。推力和燃料流量是用活跃的引擎功率设定算出来的(这个功率设定反过来又是N1极限模式的函数)。
加速度段是根据自动飞行最小垂直速度极限和自动油门加速度极限计算出来的。
1.5.2 巡航阶段
沿着横向路径计算的巡航阶段的竖向路径非常简单。典型情况下,它由加速度或者负向加速度组成,加速度是爬升速度加速到巡航速度的加速度,负向加速度是减速到降落最高点的负向加速度,整个巡航阶段的竖向路径是在巡航高度处经由基于时间的积分小步骤预测出来的,在每一个积分小步骤处,飞管计算机会根据预定的飞机目标速度、风、阻力、引擎推力来计算沿程速度、沿程距离、和燃油燃烧量。
预定的飞机真空速衍生自飞行员选择的巡航速度计划表以及适用的机场相关速度限制。阻力是飞机速度和转弯角度的函数。对于水平飞行,推力必须等于阻力。在给出所需推力的情况下,可以计算出引擎功率设定(%N1)这个数值将是计算燃油流量的基础。
1.5.3 巡航阶段
降落路径是从目的机场开始往后推算的路径,从目的机场开始经由很多小的积分步骤到巡航高度,来预测这个降落路径,一般的降落阶段竖向路径的构建理念是让飞机尽可能长时间地保持在高处,并在适当的时候空转发动机推力。这个理念使得燃油利用率最大化但是需要降落阶段的最高点的位置非常准确。
1.5.4 竖向剖面总结
飞行计划的每个航路点处预测的飞机垂直状态,每个重要的垂直点处飞机垂直状态,都在飞管计算机里计算并存储。重要的垂直点有爬升阶段的最高点,降落阶段的最高点,速度改变高度,姿态改变时的高度。预测出来的飞机垂直状态很重要因为:
(1)它将显示给飞行员并让飞行员对航线剖面的潜在问题有所警觉,比如横向路径的旁路和非连续点,陡峭的竖向航段;
(2)它将报给空管局以做飞行计划和监视用途;
(3)预测的降落路径是控制飞机从巡航高度飞到目的机场跑道的基础。计算出来的最高降落点会建议飞行员什么时候开始降落。当飞机处于飞管计算机航线降落垂直导航模式时,飞管计算机会通过监控航线的垂直偏差给自动飞行发送垂直速度命令来真实地控制飞机飞到计算好的降落航线。
2 飞行步骤设计工具
步骤设计工具是基于PC机的Windows环境下的软件程序,航空公司可以用,导航数据库供应商能用,飞行步骤设计专员和空管局都能使用。使用这个软件可以分析、设计、测试终端区域飞行步骤和飞管计算机系统使用的同伴的航线。
明确地说,飞行步骤设计工具有以下功能:
(1)测试和编辑已经存在的飞行步骤和航线数据,这些飞行步骤和航线数据包括在已经被加载过的导航数据库里。加载到飞行步骤设计工具里的导航数据库磁盘正是加载到飞管计算机磁盘。
(2)创建、编辑新的飞行步骤和航线。
(3)验证已存在的或经过修改的或新创建的飞行步骤和航线是否符合ARINC424和飞管计算机系统规章。
(4)新建并维持多个补充的导航数据库,这些数据库包含新建的或修改的飞行步骤和航线数据。
(5)将选好的飞行步骤和航线数据以格式化的报告打印出来。
(6)通过使用选择好的飞管计算机性能模型计算选定好的航线的横向剖面和竖向剖面,然后清晰详细地画出并打印出横向路径和竖向路径。
飞行步骤设计工具是真实的Windows程序,可通过Windows的程序管理器进入,包含Windows环境下的所有便利操作,比如鼠标控制,图标表示,菜单选择,可变屏幕大小,等等。飞行步骤设计工具是在微软Visual C++环境下执行的多文档多视图的程序,主要由以下4个组件组成。
①导航数据库飞行步骤编辑器(用于新建/编辑航路点、标准仪器离场程序、标准进近程序和进近程序)。
②导航数据库航线编辑器(用于把飞行步骤合并到完整的航线里去)。
③飞机性能模型和环境模型编辑器(仅适用于737-300,-400,-500)。
④横向竖向飞行剖面图绘图器。
2.1 飞行步骤编辑器
使用飞行步骤设计工具的飞行步骤编辑器窗口,导航数据库的飞行步骤和航路点可以检查、编辑、新建、保存、打印,导航数据库的飞行步骤也即是标准仪器离场程序、标准进近程序、进近程序。这些检查、编辑、新建、保存、打印功能是通过菜单栏、工具栏、各种各样的对话框、列表框、和命令按钮来实现的。用户可以将任意飞管计算机导航数据库磁盘加载到飞行步骤设计工具里面,并在那里显示出来。显示出来的飞行步骤数据可以修改并保存到另一个导航数据库文件里,用户还可以自定义文件名。飞行步骤设计工具可以撤销这个文件但是并不影响导航数据库输入磁盘的数据。类似地,使用数据(航路点等等数据)不管是从导航数据库加载过来的还是手动新创建的数据,新创建的飞行步骤可以构建起来,可以保存、打印。
2.2 航线编辑器
使用飞行步骤设计工具的航线编辑器窗口,导航数据库公司的航线可以检查、编辑、新建、保存和打印,适用的ARINC424和飞管计算机系统规章应用在航线编辑过程和航线编辑完成之后。
简单地点一下工具栏上的画图按钮,就可以画出航线的竖向或横向剖面。我们要画的航线,它必须包含离场机场、目标机场还有至少一个航路点。单独的飞行步骤比如标准仪器离场程序、標准进近程序,是画不出来的。(它们必须包含在航线里然后才能画出来)
2.3 性能模型编辑器
为了预测特定航线必须指定起支配作用的性能模型。性能模型由很多条目组成包括机体/引擎构型、速度计划表模式、环境模型等等。
使用飞行步骤设计工具的性能模型编辑器窗口,性能模型可以检查、新建和编辑。定制化的性能模型可以像文件一样保存起来,之后可以被选定以预测和画出飞行轨道的横向和竖向图。为了简化工作量,性能模型编辑器只允许完整性能模型的子集属性被具体规定(对预测飞机飞行轨道有较小影响的条目都将设置成默认值)。
2.4 飞行剖面图绘图器
使用航线绘图器窗口,对已选好的航线进行预测的横向路径和竖向路径就能画出并打印出来。计算出来的飞行轨道基于性能模型,而性能模型由用户自己指定。用户可以放大图的任何地方,查看周围航路点和导航辅助设备,还可以获得表格格式的飞行轨道信息。另外,还可以画出燃油与时间关系的图,燃油与距离关系的图。飞行步骤设计工具实际上使用了飞管计算机的ADA软件,这个软件重新宿主到PC机上以方便飞行步骤设计工具使用。这确保了飞行步骤设计工具计算出来的显示出来的飞行轨道与飞机在飞管计算机导航控制下飞行的轨道一致。
2.5 飞行步骤设计工具的潜在使用者
飞行步骤设计工具真的是姗姗来迟。下述人员可以立即从中受益:
(1)终端区域飞行步骤的设计人员。很多年来,飞行步骤设计人员在新建、修改终端区域飞行步骤时不得不让飞管计算机供应商参与进来。当前,设计人员使用量角器、圆规、尺子和工程图纸,手动画出他建议的飞行步骤然后提交给飞管计算机供应商以查看飞管计算机能否飞行这个步骤,然后飞管计算机供应商用实验室设备来测试这个新步骤然后将问题反馈给设计人员。在实际操作中,这个过程会反反复复重复直到新的飞行步骤能用。使用飞行步骤设计工具的话,设计人员可以扔掉量角器、圆规,大大降低对飞管计算机供应商的依赖性。
(2)航空公司。航空公司可以有好几种方式来使用飞行步骤设计工具。使用导航数据库已发布的终端区域飞行步骤和导航辅助设备,航空公司可以开发自己公司定制的航线以最小化燃油消耗并最优利用区域内的导航辅助设备。飞行员可以通过飞行步骤设计工具来熟悉自己将要飞行的航线,可以提前让他们提防潜在的问题并留意另外的可选的航线。
(3)飞管计算机产品支持人员和工程人员。无论是在未来的飞管计算机工程开发方面还是在当前的现场产品支持方面,飞管计算机供应商都可以使用飞行步骤设计工具来改善他的服务。飞行步骤设计工具可用于飞管计算机软件测试,日常的导航数据库的测试,问题报告调查,这代替了昂贵的飞管计算机还有飞机仿真实验室设备。
FAA和CAA等监管机构。FAA和CAA这些监管机构可以使用飞行步骤设计工具来检查某型飞机要飞的步骤。使用飞行步骤设计工具,可以对与该飞行步骤相关联的航线进行分析,这个分析是关于地形、噪音敏感区域、障碍物和相邻航线的。
3 结语
为了在自动操作终端区域飞行环境下使飞管计算机达到最佳运作效果,终端区域飞行步骤的设计与飞管计算机之间的协作很有必要进行改善。飞行步骤设计人员不能简单地对形成飞行轨道的所有元素进行负责。这个软件可以让用户很容易地新建和编辑导航数据库飞行步骤和航线并在办公室实际测试飞行中的操作。
参考文献
[1] ARINC CHARACTERISTIC 702A-3.ADVANCED FLIGHT MANAGEMENT COMPUTER SYSTEM. December 15,2006.
[2] Ian Moir, Allan G Seabridge. Civil Avionics Systems. Professional Engineering Publishing UK, 2003.
[3] 赵东伟. 飞行管理计算机水平导航功能的研究[J].山东工业技术,2016,8(16):127.
[4] 魏志强,王超.飞行管理系统中飞行计划模块的功能设计与仿真实现[J].民用飞机设计与研究,2012,3(3):22-25.
