长骨骨干骨折复位机器人研究现状与展望
2019-01-18张肖在祁富贵王鹏飞张自启李雪阳
史 刚,张肖在,祁富贵,王鹏飞,张自启,殷 悦,李雪阳,焦 腾*
(1.空军军医大学军事生物医学工程学系,西安 710032;2.联勤保障部队第942医院医学工程科,银川 750000;3.空军军医大学第一附属医院创伤骨科,西安 710032)
0 引言
骨折是创伤骨科最常见的外科创伤,特别是四肢长骨骨折,多发于工业生产、建筑工地或交通事故中,医学上将这一类损伤称为高能损伤。近年来,随着人类社会生产、建设、交通和生活节奏的加快,此类损伤呈明显增加趋势。四肢骨折治疗理念随着抗生素的应用和医疗科学技术的发展而更新,主要经历了保守治疗、20世纪60年代AO/ASIF国际内固定研究学会(Association for the Study of Internal Fixation)提出的 AO(arbeitsgemeinschaft für osteosythese)治疗原则和90年代Gerber与Palmar等提出的生物学接骨术(biological osteosynthesis,BO)治疗原则 3个阶段[1-3]。
近年来,交锁髓内钉治疗四肢长骨骨干骨折已经成为标准治疗方法[4]。髓内钉治疗方法中心固定的方式在对抗应力方面相比钢板固定方法有明显优势,同时复位固定也在远离骨折部位的骨骺端附近进行,有效保护了骨折局部血运。但由于该治疗方法采用微创闭合复位,术中需多次透视,手术医生和骨折患者放射性暴露时间长达158~316 s[5],增加了辐射风险。另有文献报道,闭合复位加髓内钉内固定治疗骨折在矢状面和冠状面上对位不良占2%~18%[6],通过术后CT检查证实,超过10°的旋转畸形发生率高于40%[7]。当骨折复位旋转畸形超过10°时就会对患者的生活产生明显的影响,情况严重时需要再次手术纠正。
如何获得准确、稳定的复位,同时减少复位过程中的透视次数,降低医患双方的辐射风险成为亟须解决的问题。由于四肢长骨周围均包裹有各类运动的肌群、神经和软组织,复位过程需要克服强有力的肌肉收缩牵拉力[8],现有的外科手术机器人均不能满足要求,因此,国内外相关机构的研究人员进行了不同的尝试,研究开发了多种骨折手术机器人,各项研究取得了一定的进展和成果。现就这些相关研究进展和取得的结果作一综述。
1 研究现状
医疗手术机器人是集机器人、医学、运动控制学、人工视觉、计算机信息技术、医学图像处理技术、人因工程学、信号传输与控制、软件工程学等诸多学科领域于一体的多学科交叉融合研究结果[9]。研究人员巧妙地将机器人的控制精确、运行稳定、无生理性抖动、可重复性好、抗疲劳等特征与外科医疗技术相结合,设计出不同功能的医疗手术机器人,目前已经延伸到骨科的多个专业,包括创伤、脊柱、关节、运动医学、骨肿瘤等,如ACROBOT和用于髋臼打磨置换的ROBODOC和CASPAR等[10]。由于长骨骨干骨折治疗的复位机器人运行时需要承受一定的负荷[11-12],并且需要足够的运动空间以完成复位动作,与目前其他外科领域应用的机器人工作时几乎无负荷不同[13],研发技术难度高,暂无广泛推广应用的长骨骨干骨折复位机器人。
1.1 基于Stewart平台以及其演变结构的并联式长骨骨干骨折复位机器人
Stewart平台是英国高级工程师Stewart在1965年研制的[14],该平台主要由6根并联排列的可伸缩连杆连接上下2个平面,通过调整6个连杆的长度可以实现2个平面6个自由度的精确运动控制。由于这2个平面之间没有固定的连接轴,该模型可以在运动空间范围内完成较为复杂的动作。该平台主要应用在数学和工程学领域,尤其是空间动力方面的研究,例如用于训练飞行员的直升机空间运动模拟[15-16],另外Stewart教授指出其也可应用于医疗领域。
1994年,美国骨科医生Taylor及其弟弟合作,将Stewart平台原理与Ilizarov外固定架技术进行完美结合,设计出一款六自由度的骨科用矫正支架系统,被称为泰勒空间支架(Taylor spatial frame,TSF)[17-18]。该系统主要包括两大部分,一部分为用于矫正的2个环和6根可伸缩螺杆,另一部分为运算程序系统。该系统可根据用户输入的调整目标数据自动计算出6个可伸缩螺杆的对应目标长度,用户根据系统生成的矫正处方,定期调整6个螺杆的长度即可达到矫形治疗的目的。TSF在临床上的成熟应用主要在骨折畸形愈合和畸形骨病的慢性矫正、骨缺损的牵张成骨等方面,配合截骨手术,在临床治疗中取得了较满意的疗效[17,19-21]。
英国拉夫堡大学(Loughborough University)的研究人员Bouazza-Marouf等在20世纪90年代中后期将计算机和机械控制技术与外科骨折治疗方法相结合,设计了一种基于透视图像的机器人视觉系统和专用复位机械手(如图1所示),论证了医用机器人技术的可行性,阐述了机器人复位的基本要求,并就相关安全和无菌要求进行了讨论[22]。但并未见进一步实施骨折复位的介绍和实验结果报道[23]。
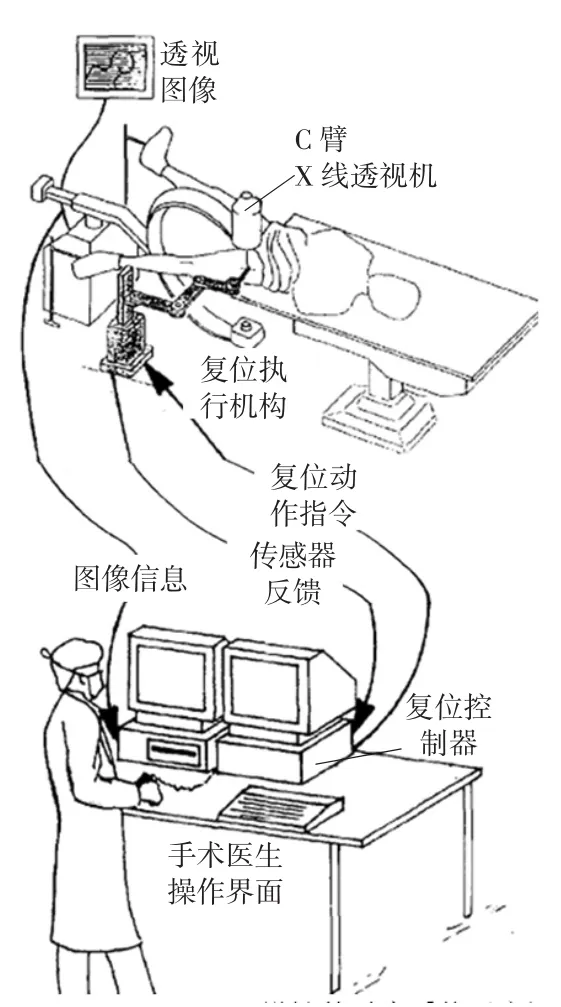
图1 Bouazza-Marouf等设计的手术系统[22]
21世纪初,德国汉堡创伤中心的Seide教授以Stewart平台和TSF技术为基础进行改进,设计出了六轴自动固定器(如图 2所示)[24]。该系统在6根驱动杆上安装了电动驱动装置以及载荷感应装置,医生通过软件输入目标动作,计算机经过计算自动对外架进行控制,来进行畸形和骨折复位的急性操作以及骨愈合应力情况的测量。
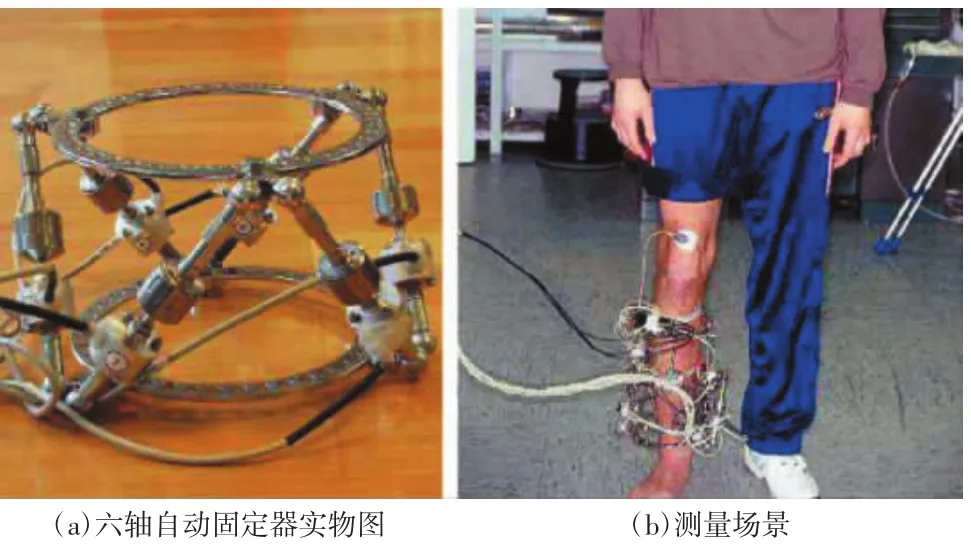
图2 Seide教授设计的六轴自动固定器及测量场景[24]
2002年,以色列耶路撒冷的希伯来大学计算机与工程学院和哈德萨大学及海法理工大学等研究机构共同分析了现有骨折复位治疗技术的局限性,设计开发出长骨骨折的髓内钉锁定机器人辅助系统[25-26],并讨论了计算机辅助外科系统的目标和功能[27]。该系统主要辅助确定髓内钉锁孔位置,可减少术中透视次数和手术医生辐射风险,缩短手术时间。
解放军总医院唐佩福团队设计了外侧带有定位标记球结构的Stewart平台(如图3所示)[28-29],在CT扫描三维重建图像的基础上编写相关软件功能模块,对平面位置进行识别和控制,以健侧骨为参考进行复位操作,融入视觉伺服控制进行实时监测和安全性反馈,并完成了模型骨实验和离体牛股骨实验,重复10次实验结果显示轴向位移平均误差为1.24 mm,侧向位移平均误差为1.19 mm,侧方成角平均为2.34°,内旋/外旋角度平均为2.83°,复位结果满足临床医学应用要求[30-34]。此外该课题组还测试了不同参数配置下平台的运动范围极值,结果显示平台空间运动范围与平台直径成反比,与连接杆可伸缩量成正比[30-34]。由于系统空间运动范围有限,对于错位较大的骨折或骨畸形治疗时需要先进行适当的牵引调整,之后再固定复位。

图3 解放军总医院唐佩福团队设计的机器人系统[28-29]
哈尔滨工业大学蔡鹤皋院士指导课题组成员以6-PTRT并联型结构为基础,结合正骨技术,确定了相应参数指标,设计了面向正骨复位的机器人系统(如图4所示),分析了机器人运动正逆解相关问题,并对复位方法进行了模型实验、仿真研究和尸体标本实验,实验结果显示复位结果能够满足正骨复位的需求[35]。由于尸体的肌肉是僵硬的,不能主动收缩,与实际临床活体麻醉状态活体肌肉和软组织存在差异,未见进一步临床实验的报道。
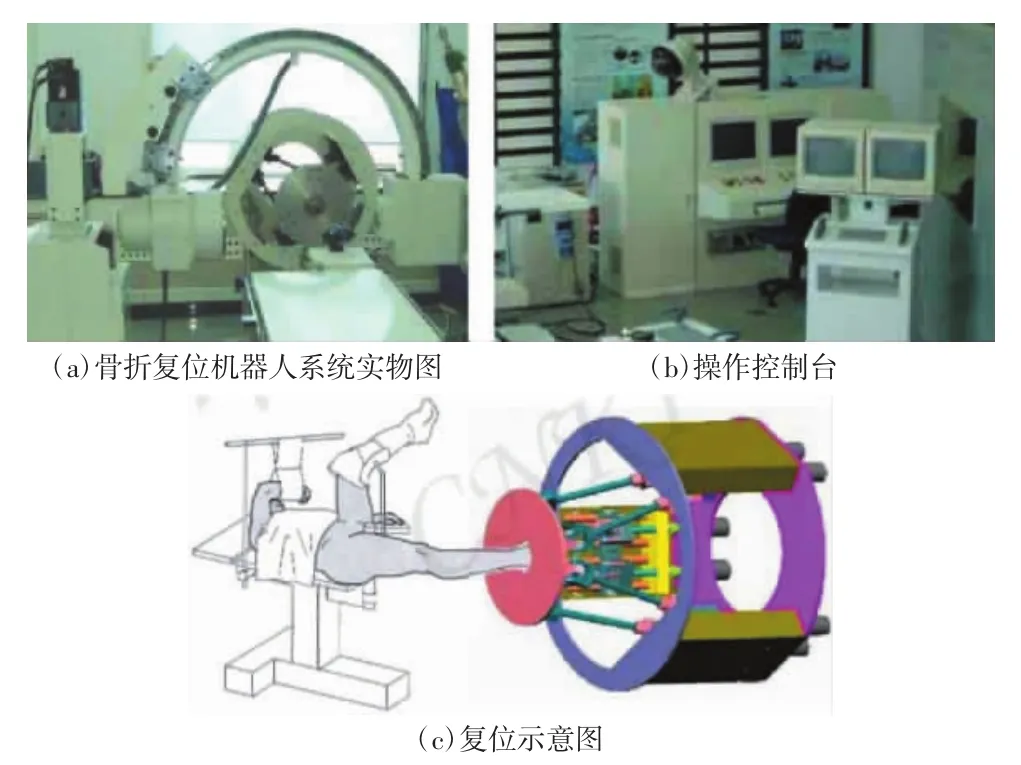
图4 哈尔滨工业大学设计的骨折复位机器人系统[35]
1.2 基于串联式工业用机器人的长骨骨干骨折复位机器人
2004年,德国雷根斯堡大学与应用科学大学合作,在众多医疗机器人和工业机器人中根据负载能力和自身质量等多种因素综合匹配选择,最终选择以Stäubli RX130工业机器人为基础进行改造,设计了股骨干骨折复位机器人RepoRobo(如图5所示)[36]。其工作方式是通过安装在机器人末端的抓持器与固定在股骨一端的钢针形成稳定连接,实现六自由度直接牵拉和旋转复位操作,同时通过力传感器实现对复位力的监测。尽管只进行了股骨骨折模型复位实验,但对于长骨骨折复位过程中可能涉及到的问题进行了论证,证明了该系统用于骨折复位的可行性。

图5 德国雷根斯堡大学与应用科学大学设计的骨折复位机器人RepoRobo[36]
2005年,德国汉诺威医学院创伤科Gosling教授与德国布伦瑞克工业大学机器人与过程控制研究所Westphal教授合作,设计了一套带有触觉和距离反馈的复位控制系统(如图6所示)[37]。该系统使用一个操纵杆作为控制输入设备,利用2台正交的摄像机获取增强的图像、1台工业用机器人RX90作为复位执行机构。在不同条件下进行了15例合成股骨骨折复位操作,经过比对复位结果证明了在机器人辅助条件下可以减少射线暴露时间并且可获得更高的复位精度。但该研究只进行了模型骨的实验,未见后续实验报道[38]。

图6 德国汉诺威医学院和布伦瑞克工业大学机器人与过程控制研究所设计的骨折复位机器人系统[37]
2007年11月,上海市第六人民医院骨科阮志勇在德国汉诺威医学院以法国法韦日TEC-systems公司生产的RX 90CR工业机器人为基础,配合德国brainlab导航系统、力量扭矩传感器和西门子三维C臂系统的SiremobilIso C 3D设备,对14具不带软组织的成人正常股骨标本进行复位实验,实验中先获取骨折前股骨和动态追踪标志的相对位置,之后制作骨折模型,操作者通过三维C臂获取骨折位置信息图像,根据计算机系统生成的实时三维模拟图像来指导操作手柄主从式控制机器人完成复位[13]。实验总计进行了144次,结果显示A型骨折复位轴向分离平均值为1.08 mm,侧方移位平均值为1.61 mm,内外翻角度平均值为1.09°,前后屈角度平均值为1.42°,内旋/外旋角度平均值为1.37°,各项参数显示优于临床现用方法。
1.3 其他自主设计结构和控制方式的长骨骨干骨折复位机器人
2008年,日本东京大学和大阪大学联合研制了用于辅助股骨骨折复位的手术机器人FRAC-Robo(如图7所示)[39],其工作方式为在患者骨折远端与患者足部固定,可提供平移、牵引、旋转6个自由度的操作,辅助医生完成牵引复位。该装置有效减轻了手术人员的劳动强度,但骨折近端没有完全固定,在牵引旋转骨折远端的过程中,由于肌肉和软组织的牵拉骨折近端也会发生一定的旋转,并且此变化不可控,因此不能很好地控制骨折两端进行精准地相对运动,并且在固定过程中容易再次丢失复位,复位精度依然受手术医生经验影响较大。
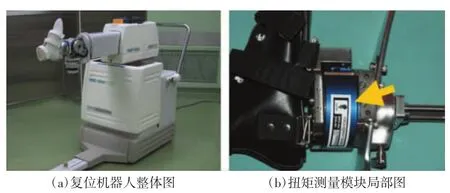
图7 日本东京大学与大阪大学设计的骨折复位机器人系统FRAC-Robo[39]
北京积水潭医院创伤骨科自2001年开始与北京航空航天大学机器人研究所合作国家高技术研究发展计划(863计划)重大项目,共同对CAOS(computer assisted orthopaedics surgery)应用技术进行研究,联合研制了具有六自由度的小型模块化复位机器人系统(如图8所示),由骨折复位功能模块、机器人定位功能模块、计算机规划控制模块组成[40]。该系统经过模型骨、尸体骨、尸体3个阶段的实验研究[41],由参加研发的医生亲自实施临床手术,总结了操作经验,不断优化操作程序。该系统是胫骨骨折专用装置,共完成临床胫骨骨折手术40例,均获得良好的骨折复位,且远端锁钉均一次锁定成功[42]。
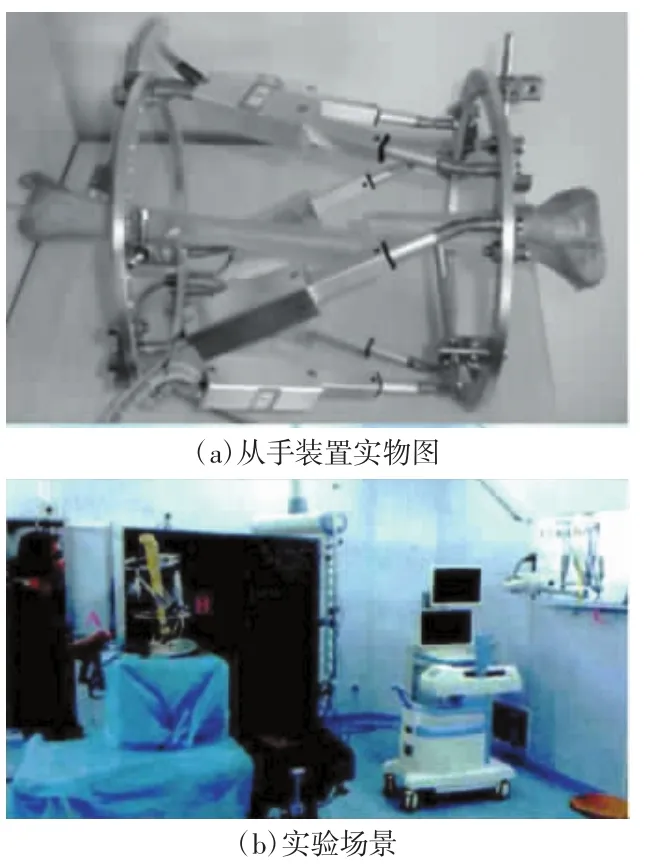
图8 北京积水潭医院与北京航空航天大学机器人研究所设计的骨折复位机器人系统[40]
2016年,原第四军医大学生物医学工程学院与其第一附属医院创伤骨科合作,研究设计出一款六自由度的数字化的股骨干骨折复位机器人系统(如图9所示),并通过大量实验对系统进行了多次改造,目前该系统在完成模型骨实验的基础上进行了2例成年山羊活体在体骨折复位实验,取得了良好的复位结果,进一步的临床实验正在办理审批中[43]。
2 主要进展
CAOS指计算机辅助导航骨科手术,目前比较认同的适宜应用CAOS的临床手术有骨盆后环骨折及骶髂螺钉内固定、骨盆前环和髂骨骨折、髋臼骨折、股骨颈及转子间骨折、髓内钉手术、长骨及骨盆截骨术、股骨垢滑脱等[44],暂不包括长骨骨干骨折的治疗。为了尽快弥补计算机辅助机器人技术在长骨骨干骨折治疗领域应用的不足,近年来,国内外相关研究机构开展了深入研究,在复位机器人机械结构模型、图像处理和导航等关键技术领域取得了一些新的进展和突破。

图9 原第四军医大学与其第一附属医院设计的骨折复位机器人系统[43]
2.1 复位执行机构模型的发展
骨折复位执行机构模型从最初在工业机器人基础上改造,逐步发展,经过对以Stewart平台为基础的各种不同结构的改进,取得了很大进步。Stewart平台能够提供精确平稳的复位和治疗动作,是完成高精度的小范围局部操作的最优选择之一,但由于受到运动空间的限制,单独在长骨骨折复位治疗中应用的不多。骨折复位执行机构是复位动作的末端执行单元,其运行的准确性直接关系到复位系统的准确性,同时,由于复位过程中应力较大,必须科学设计、合理选材以保证复位执行单元的刚性。近年来,相关研究机构不断尝试创新,自主设计了用于长骨骨折复位治疗的机器人结构模型,取得不错的成绩。
2.2 相关图像处理及导航技术的发展
传统骨折手术中手术医生只能根据实时透视获取的二维图像结合自身手术经验推测患者骨折端的立体位置关系,以便进一步操作,手术精度因人而异,很难控制。
近年来,图像处理技术取得了很大进步,主要体现在图像识别、分割、重建、配准、融合和传输等方面。图像识别分割技术已经达到可形成包含解剖结构和生理功能的重建图像水平,为手术医生提供了更加直观、生动的画面;在配准定位融合方面,解剖标志注册技术(anatomical registration)已发展成熟,缩短了配准融合时间的同时大大提高了精度[45]。
随着图像处理技术的进步,基于计算机运算的机器人定位方法也得到了发展提高,借助定位机器人,手术医生可以通过虚拟现实图像快速准确地进行髓内钉锁定等操作。其他应用的导航技术还有光学导航、电磁定位导航和超声定位导航。光学导航是最真实的导航技术,但手术中往往由于各种因素遮挡导致其不能很好地发挥作用,这个不足可以通过合理地布局和规划进行改善。电磁导航是一种无辐射、快速、精准可靠的方式[46],主要用于髓内钉锁定孔的定位,此外,还可以提供显示髓内钉远端锁定孔的位置及方向的三维实时位姿情况[47-48]。这些技术的发展有力地保证和提高了手术的安全性和准确性,减少了射线暴露时间。
3 展望
目前,部分长骨骨干骨折复位机器人的研究成果已经进入临床实验阶段,但距离大范围推广使用还有一定差距,复位机器人的结构模型和配套的图像处理技术及导航技术还有进一步提高的空间。
长骨骨折复位机器人发展可在这几个方向尝试:(1)发展多模态示踪导航系统。在提高抗干扰能力的前提下,以光学示踪导航为主、虚拟现实技术为辅,提高诊断的准确性和手术的安全性、精确性。(2)设计更加科学的复位结构模型。既要拥有足够的刚性以对抗复位过程中肌肉和组织的牵引力,又要保证复位动作的精确灵活。(3)控制单元与执行单元分开。引进最新的无线通信控制和网络技术,减少人员X线暴露时间,也可进行远程操作,预计可实现太空、海底、极地、边远地区等异地控制[49],避免转诊,节约医疗成本,充分发挥有限的专家资源,提高医疗效率。(4)改变供电模式。应用最新的电池技术,选用可快速更换和快速充电的电池模块,避免使用线缆供电,一方面有利于消毒灭菌,另一方面节省有限的手术空间。(5)实现多种工作模式。实现全自动、半自动、主从式控制等多种工作控制模式自由切换,满足不同手术医生的使用习惯。(6)模块化设计。针对不同骨折类型,可快速更换模块,设计标准接口,预留DICOM图像接口,远程图像、指令传输接口等。
从目前国内外研究和实验进展情况来看,长骨骨干骨折复位机器人的发展比其他领域医疗机器人缓慢,但这并不能限制此项技术的发展,可以预见在未来几年,将有多种机器人系统应用于长骨骨干骨折临床复位实验,在提高骨折复位精度、减少X线暴露时间、减小手术创伤、降低手术医生的体力支出方面作出巨大贡献。