无游梁抽油机换向部分的设计与控制*
2019-01-18郭李彤周江涛
郭李彤,周江涛
(西安石油大学 机械工程学院,陕西 西安 710065)
0 引 言
随着大量低渗透油田的开发和投入,使得下泵深度和排量不断增加,对于稠油、高凝油等特种油田的开发,采油工艺对有杆抽油系统提出了长冲程、低冲次等要求[1];其次,游梁式抽油机采用四连杆机构,决定了驴头运动的不均匀性,为避免加速度过大,四连杆机构中的游梁摆角和曲柄-连杆比都不能过大[2]。而使用无游梁式抽油机可减轻抽油机重量和体积,扩大设备的使用范围及改善其经济指标,适用于长冲程、低冲次,以及深井和稠油井的采油作业。
目前,常见的无游梁抽油机有链条抽油机、皮带抽油机、液压抽油机、直线电机抽油机等[3]。但是,在现有的多种无游梁抽油机中,当无游梁抽油机作业时,上冲程和下冲程的悬点速度相同,传递效率低、功耗大,无法满足低排量井抽油效率的要求。文中通过对无游梁抽油机换向部分的设计,来提高抽油机的工作效率,并提出相应的控制方案。
1 工作原理
针对无游梁抽油机,适用于长冲程、低冲次井的生产使用,但上冲程和下冲程的悬点速度相同,为了更大限度的提高效率、节约能耗,现提出一种设计方案,以实现抽油的上冲程运行时间长、下冲程运行时间短。
1.1 换向部分工作原理
无游梁抽油机的换向机构包括齿轮、空套齿轮、惰轮和离合器,通过控制离合器与空套齿轮的接合和断开来控制抽油机的换向和变速。
如图1,换向机构实现抽油机的换向和变速作用,Ⅰ轴为主动轴,齿轮Z1和齿轮Z2通过键连接安装在Ⅰ轴上,惰轮Z3空套在Ⅱ轴上,与齿轮Z2相啮合,空套齿轮Z4和空套齿轮Z5空套在Ⅲ轴上,空套齿轮Z4与齿轮Z1啮合,空套齿轮Z5与惰轮Z3啮合。
抽油机进行抽油作业时,上冲程过程中,控制离合器M1向左与空套齿轮Z4接合时,Z1和空套齿轮Z4啮合,空套齿轮Z4与Ⅲ轴同向旋转,将动力传到Ⅲ轴末端,可设置悬点速度小;而下冲程过程中,离合器M2向右与空套齿轮Z5接合,齿轮Z2和惰轮Z3啮合,惰轮Z3和空套齿轮Z5啮合,带动Ⅲ轴反向旋转,将动力传到Ⅲ轴末端,可设置悬点速度大,且实现反向转动。
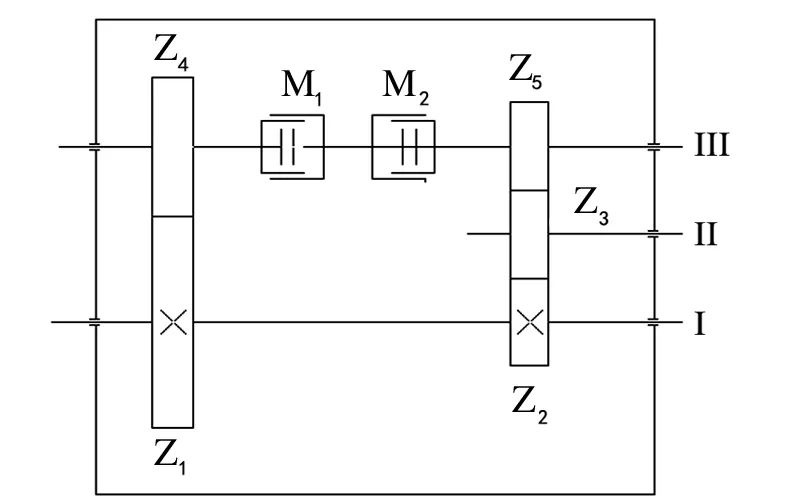
图1 换向机构的结构示意图
1.2 控制部分工作原理
离合器在机器运转中可将传动系统随时分离和接合,其接合平稳分离迅速而彻底[4-5]。
离合器M1和M2分别和齿轮Z4和Z5接合,通过控制离合器的分离和接合,可以使齿轮Z4或齿轮Z5带动Ⅲ轴做旋转运动,将动力传给下一级。
1.3 平衡部分工作原理
抽油机的平衡装置可以选择安装在Ⅲ轴末端上,在换向机构的输出端安装平衡轮,平衡轮上缠绕有平衡绳,平衡绳的上端固定在平衡轮上,钢丝绳的下端连接有平衡块,抽油机的抽油动作与平衡重的运动方向相反,起到平衡的作用。
2 离合器的控制方案
离合器选用气控离合器,当离合器需要与齿轮接合来传动扭矩时,离合器进气,当离合器与齿轮分离,不需要传递扭矩时,离合器断气或排气。
2.1 机构功能分析
电机启动以后,通过离合器的作用,与齿轮接合来传递扭矩[6]。通过对机构工作性能分析得到,离合器在启动过程中或停止过程中,通过位置传感器的判断,使力矩逐渐增加到满载或从满载逐渐地减到零。
2.2 控制系统的设计
本控制系统的控制结构框图如图2所示。
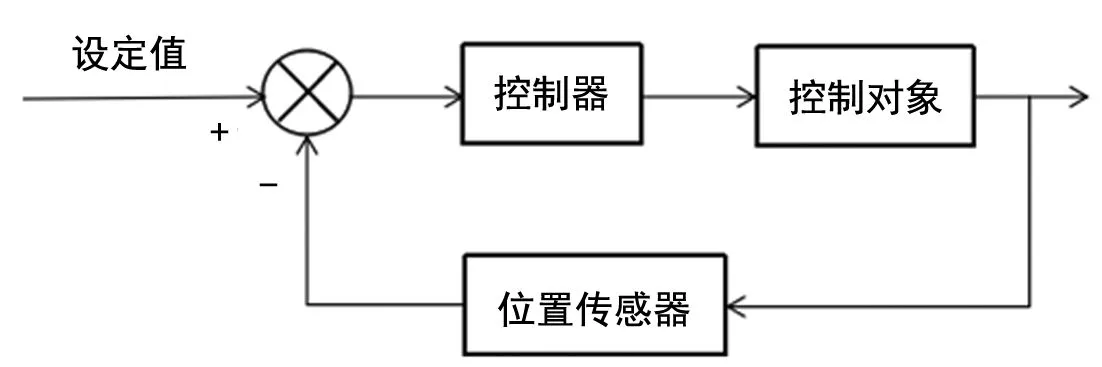
图2 控制系统的结构框图
系统结构框图,在上死点和下死点位置分别安装位置传感器,其中位置为设定值,控制对象是气控离合器,控制对象的输入量为位置。检测环节为位置传感器,输出的信号为位置信号。
2.3 控制系统的实现
2.3.1PLC控制器简介
可编程逻辑控制器(Programmable Logic Controller,简称PLC),是一种具有微处理机的数字电子设备,用于自动化控制的数字逻辑控制器,可以将控制指令随时加载内存内储存与执行。PLC由内部CPU,指令及资料内存、输入输出单元、电源模组、数字模拟等单元所模组化组合成[7],广泛应用于目前的工业控制领域。
虽然PLC所使用之阶梯图程式中往往使用到许多继电器、计时器与计数器等名称,但PLC内部并非实体上具有这些硬件,而是以内存与程式编程方式做逻辑控制编辑,并借由输出元件连接外部机械装置做实体控制。因此能大大减少控制器所需之硬件空间。实际上PLC执行阶梯图程式的运作方式是逐行的先将阶梯图程式码以扫描方式读入CPU 中并最后执行控制运作。
2.3.2PLC系统组成
(1) 系统原理图 如图3所示。由CPU模块、模拟量输入/输出模块、电源模块以及通讯模块组成。
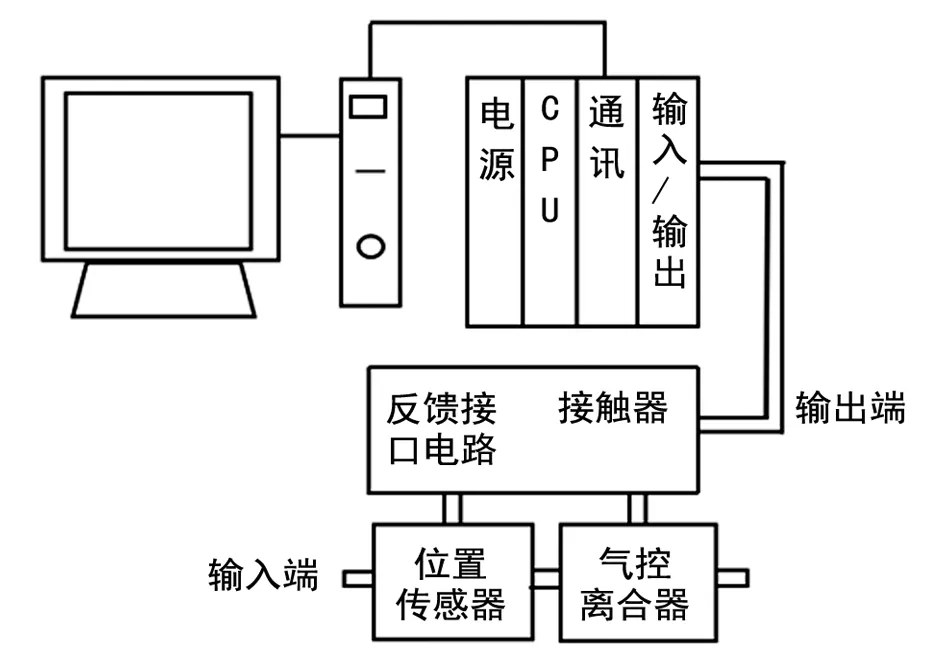
图3 系统组成框图
位置传感器得到的检测信号为位置信号,作为反馈信号输入到PLC控制器中,用来判断上冲程/下冲程,从而选择要工作的离合器。
(2) PLC控制电路 根据系统结构的功能原理制定如下所示PLC控制电路,控制方框图如图4。
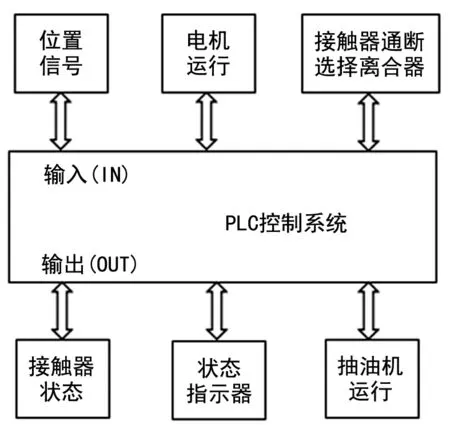
图4 PLC控制电路框图
PLC输入的信号主要有位置传感器位置信号、接触器状态信号、运行反馈信号。通过这些信号的输入PLC控制系统能根据位置进行逻辑判断,输出相应的控制信号如接触器通断状态、抽油机运行,从而实现对上冲程/下冲程悬点速度的调节。
(3) PLC自动控制程序设计 PLC的控制程序是根据离合器接合的自动控制要求来设计的[8],前面已经描述过离合器的控制要求,下面进行PLC的程序设计,程序的逻辑框图如图5所示。
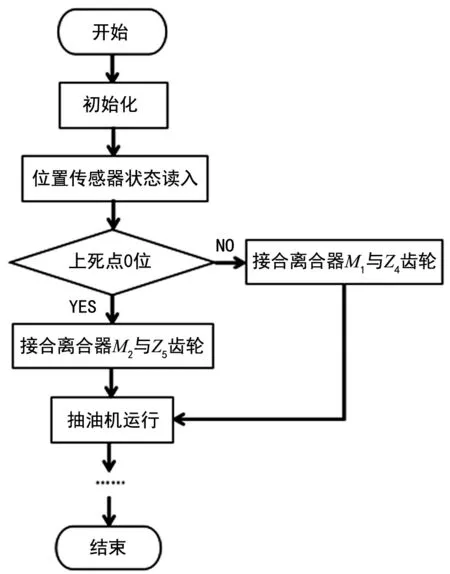
图5 程序流程框图
3 结 论
游梁式抽油机驴头运动不均匀,现有无游梁式抽油机可以减轻抽油机重量和体积,扩大设备的使用范围以及改善其经济指标,适用于长冲程、低冲次,以及深井和稠油井的采油作业,但上冲程和下冲程的悬点速度相同,传递效率低、功耗大,无法满足低排量井抽油效率的要求。文中对无游梁抽油机换向部分的设计提高抽油机的工作效率,并提出了相应的控制方案。通过换向机构中离合器与齿轮接合来实现换向和变速。并利用PLC控制电路,在保证抽油机正常运行的前提下极大的实现了换向及变速的自动化、智能化、精准化。文中选用的离合器为气控离合器,在之后的研究过程中,还需尝试其他类型离合器在PLC控制下工作的情况,以寻求最佳控制方案。
