抽薹装置定位钩改进减小蒜薹抽提力提高效率
2019-01-18王崇华
王崇华
抽薹装置定位钩改进减小蒜薹抽提力提高效率
王崇华
(河南农业职业学院,郑州 451450)
针对传统抽薹装置抽薹时抽提力较大、抽提效率低问题,该文对抽薹装置的定位钩进行了改进,并制作了钩提抽薹装置。为了解2种抽薹装置的抽薹效果,开展了2种装置(传统抽薹装置和钩提抽薹装置)在不同时段(早上、上午、下午)及降雨条件下对抽提力度、蒜薹及大蒜产量影响的试验。经过对多个指标测定和方差分析,结果表明:采用钩提抽薹装置能降低抽薹拉力,提高抽薹的稳定性和抽薹效率,并且不会造成蒜头产量下降,上午、早上及降雨条件下是抽薹的最佳时期,特别是降雨条件下,薹长和出薹率最高,分别达到47.7 cm和99.7%,蒜薹产量达到5 222.22 kg/hm2。综合来看,蒜薹抽提的最佳方案:采用钩提抽薹装置,早上和上午进行抽提,如遇降雨条件,尽量进行抽提。研究结果可为蒜农抽薹提供依据,并为蒜薹抽提的机械化研究提供理论基础。
收获机;农业机械;设计;蒜薹;抽薹装置;不同时段;降雨;产量
0 引 言
中国是全球最主要的大蒜生产国、消费国和出口国,种植面积约占世界总种植面积的1/3,产量约为世界产量的75%[1-2]。但是目前中国大蒜生产中的种植、抽薹和收获等环节主要依靠人工完成,机械化程度极低,劳动时间长、劳动强度大。大蒜生产技术的落后,严重制约着中国大蒜产业的发展,适合中国大蒜生产的农艺技术亟待改进[3]。
蒜薹是大蒜抽薹时从中抽出的花茎,是人们喜欢吃的蔬菜之一[4]。蒜薹是一种很好的功能保健蔬菜,具有较高的营养功效。但是如果蒜薹不及时从蒜茎中抽出,就会与大蒜争抢养分,阻止大蒜后期膨大,从而严重影响大蒜产量。蒜薹的抽提比较费工、费时,与大蒜的种植和收获相比,使人更加劳累。大蒜人工种植时,农民在感觉到劳累时,可更换姿势种植,在田间可蹲、可跪、可坐、可趴;大蒜在收获时,农民在田间出蒜,可以坐在凳子上,也可蹲在田间进行,姿势可以更换从而减轻劳累感。蒜薹的抽提不同于大蒜的种植与收获,目前农民仍然使用着传统的蒜薹抽提装置,在蒜薹的抽提过程中,始终要保持站立姿势,并且在抽薹过程中要始终保持弯腰姿势来找准大蒜直径中部位置。这不但使人更加劳累,并且很容易患上腰肌劳损甚至腰椎病,因此,研制新型蒜薹抽提装置,减轻农民的劳累程度,提高抽薹效率,是一个迫切需要解决的问题[5]。
目前,关于大蒜种植和大蒜收获机械化的相关研究已有很多[6-15],关于蒜薹抽提的研究较少,已研究的抽薹装置和抽薹机械实用性不强或未见推广[16-24],因此,在蒜薹抽提实现机械化与智能化之前,改进现有人工抽薹技术仍然十分必要。本研究通过改进传统抽薹装置,探讨钩提抽薹装置(改进定位钩)对抽薹效率、出薹率以及蒜薹产量和大蒜产量的影响,为蒜农大蒜生产提供参考,并为蒜薹抽提的机械化研究提供理论基础。
1 材料与方法
1.1 试验材料与试验设计
本试验于2017年10月13日—2018年4月14日在河南省中牟县韩寺镇郭辛庄村(31°41¢45²N, 114°5¢46²E)进行,前茬作物为冬瓜。供试品种为中牟大白蒜,农民自留早熟蒜种。试验田耕层(0~20 cm)土壤质地为黏质潮土,土壤有机质质量分数32.8 mg/kg、全氮1 084.16 mg/kg、碱解氮408.23 mg/kg、速效磷12.19 mg/kg、速效钾217.38 mg/kg。选用复合肥(心连心黑力旺大蒜专用肥,N∶P2O5∶K2O=18∶18∶18)作为试验用肥,基施750 kg/hm2,返青期追施300 kg/hm2,抽薹期追施300 kg/hm2。
试验采用二因素完全随机设计,重复3次,共24个小区,试验方案见表1。其中A因素为抽薹方式,B因素为不同天气条件。2017年10月13日人工开沟播种,行距20 cm,株距11 cm,小区面积3 m×10 m。2018年5月3日收获。另设置10垅蒜田,每垅4行,行长50 m,作为抽薹评分使用。

表1 试验设计
1.2 抽薹装置改进
1.2.1 传统抽薹装置
传统抽薹装置为市场上常见的蒜薹提取装置(见图1a),经冷拔丝制成,长约400~500 mm,一端为手柄,手柄长80 mm,另一端为尖状金属钉,尖状金属钉(定位钩)与金属杆之间夹角为90°。在抽拔蒜薹时,左手提住蒜薹薹苞下部,右手在叶鞘基部(距地面100~130 mm处)用尖状小金属钉按扎一小孔,同时将蒜薹抽出。
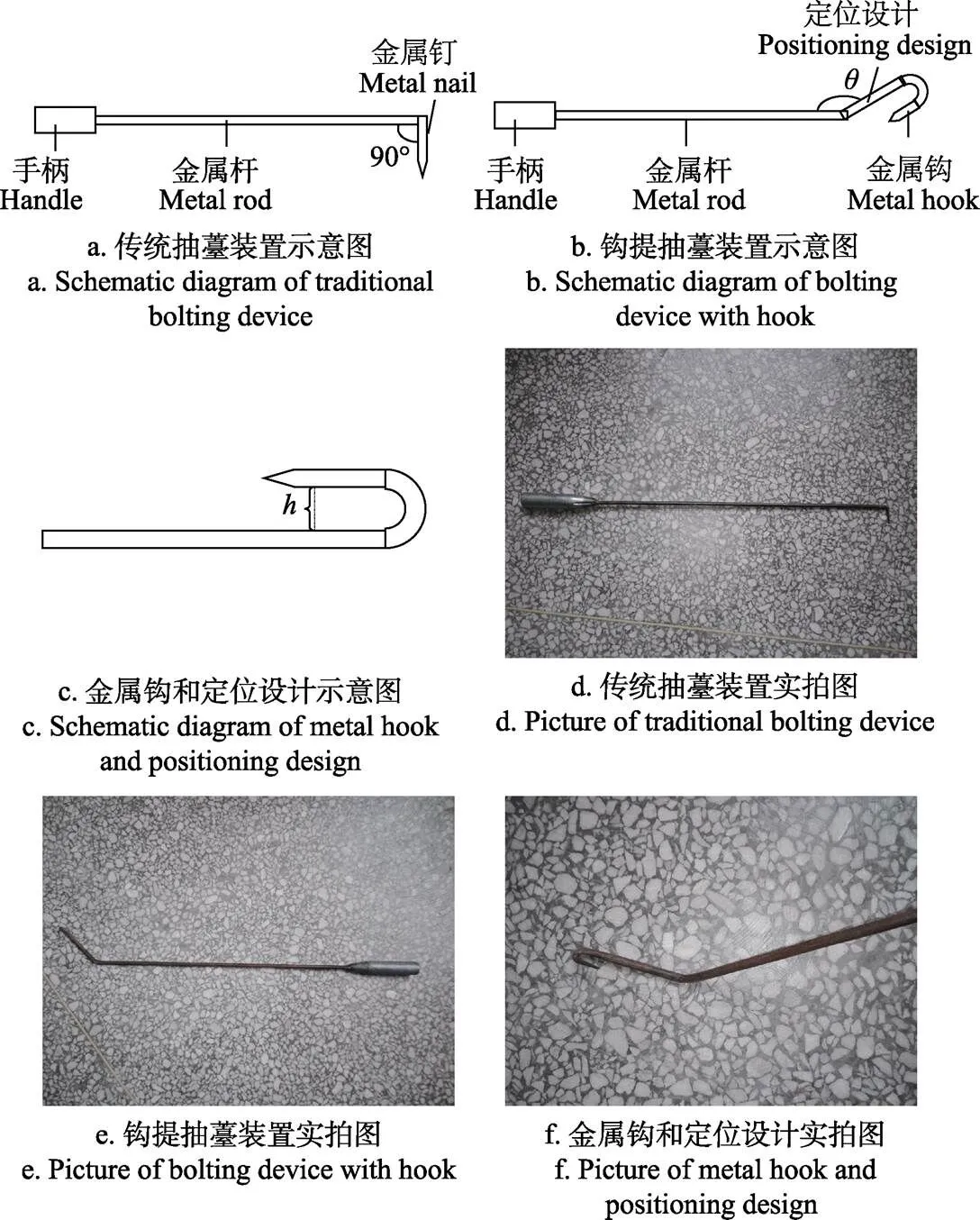
图1 传统抽薹装置和钩提抽薹装置结构示意图
1.2.2 钩提抽薹方式
钩提抽薹方式笔者单位自行研制的蒜薹提取装置(见图1b),经冷拔丝制成,金属杆长约400~500 mm,一端为手柄,另一端为尖状金属钩,金属钩后有定位设计;其中定位设计与尖状金属钩平行,两者之间距离为田间大蒜最大茎粗一半,该设计可使金属钩直接对准蒜茎中部;尖状金属钩长度大于大蒜茎粗一半,小于大蒜茎粗,该设计使尖状金属钩钩断蒜薹的同时不贯穿蒜茎;金属杆与定位设计之间夹角135°<<180°,金属杆和定位设计形成的平面与定位设计和尖状金属钩形成的平面相垂直,该设计可通过左右移动手柄来调节尖状金属钩,使其对准蒜茎中部。在抽拔蒜薹时, 左手提住蒜薹薹苞下部,右手在叶鞘基部(距地面100~130 mm处)用尖状金属钩拉一小孔,同时将蒜薹抽出。此方法可使蒜薹上提过程中,蒜薹扎断处与蒜茎外部空气始终保持畅通,此时小孔与传统抽薹方式相比较大[25]。
1.2.3 蒜薹抽提力分析
使用2种抽薹装置抽提蒜薹时的受力分析如图2所示。图2a中,=2,1×1=2×2,图2b中=4,3cos=4。由于扎断和钩断蒜薹所受到的阻力大小相同,因此2=4;由于2>41,因此1>42;由于3cos=4,0°<≤45°,因此4<3≤20.54。综上可知,3<<1,所以使用钩提抽薹方式比传统抽薹方式更省力。

注:F1、F2、F3、F4、F′、L1、L2分别为按扎作用力、蒜薹扎断力、钩提拉力、蒜薹钩断力、蒜茎阻力、按扎力臂、蒜茎阻力力臂。
1.3 测定项目和方法
1.3.1 抽薹力度
各小区选取连续10株大蒜,将呢绒草一端用透明胶带粘到蒜薹苔苞下部的花茎上,另一端栓在拉力计上,蒜茎下部开孔的同时上提拉力计,即可将蒜薹抽出,同时测出抽薹最大拉力,此力为蒜薹与蒜薹苞叶之间的最大摩擦力,拉力计采用山度SH-500数显式推拉力计。
1.3.2 农田小气候
风速采用希玛AT816一体式风速计进行测定,测定时将仪器置于大蒜蒜薹苞叶同高度处;湿度和湿度测定采用德福DF5温湿度计,将仪器置于百叶箱中,同时将仪器置于大蒜蒜薹苞叶同高度处。
1.3.3 抽薹效率
每小区抽取10 min,计算蒜薹条数。
1.3.4 蒜薹长度
蒜薹长度使用米尺量取,量取范围为从花茎扎断处至苔苞。
1.3.5 抽薹率
各小区连续抽100根蒜薹,抽薹率(%)=(抽薹总数-抽断数)/抽薹总数´100%。
1.3.6 使用评价
10位评价员提前熟练掌握2种蒜薹抽薹装置后进行抽薹试验,每位评价员负责抽1垅大蒜,每处理抽薹时间为0.5 h,抽薹后评价每种处理是否有差异。标度类型为9分制评分法:非常不喜欢=1,很不喜欢=2,不喜欢=3,不太喜欢=4,一般=5,稍喜欢=6,喜欢=7,很喜欢=8,非常喜欢=9。
1.3.7 计产
蒜薹产量与大蒜产量均在田间进行质量称量测产,其中蒜薹抽提分4次进行,采完为止,蒜头一次性收获。
1.4 数据处理
试验数据采用Microsoft Excel2003和dps7.05软件处理,并用新复极差法(SSR)进行差异显著性检验。
2 结果与分析
2.1 不同处理对蒜薹抽提拉力的影响
抽薹拉力的大小表征了蒜薹从蒜茎中抽出的难易程度,其拉力越大,蒜薹越难抽出,拉力越小,蒜薹越容易抽出。由表2可知,8种抽薹措施,其拉力分别为A1B1>A1B2>A2B1>A1B3>A2B2>A2B3>A1B4>A2B4,其中A2B2拉力最小,为25.5N,A1B1拉力最大,达到48.4 N;其中A2与A1相比,抽薹拉力都显著减小,说明在同一时段及降雨条件下,使用钩提抽薹方式提取蒜薹比传统按扎抽薹方式更容易将蒜薹抽出;A1B1>A1B2>A1B3>A1B4,且各处理间差异达显著水平,A2B1>A2B2>A2B3>A2B4,且各处理间差异亦达到显著水平,这说明在不同天气条件下,使用同一种抽薹方式提取蒜薹,晴天下午最难抽提,晴天上午次之,晴天早晨较容易,降雨条件下最容易。

表2 不同处理对抽薹抽提力及变异系数的影响
注:同列不同小写字母表示差异达到5%的显著水平(<0.05),下同。
Note: Different lowercase letters in the same column mean significant difference at 0.05 level, the same below.
从抽薹拉力极差来看,A1B1的极差为18.4 N,变异系数最大,其次A1B2极差为10.8 N,再次为A1B3、A1B4和A2B1,极差均在8~10 N之间,A2B2、A2B3和A2B4三个处理极差较小,均在6~8 N之间。从各处理变异系数来看,A1B1的变异系数最大,为10.28,A1B4次之,为9.16,其余各处理变异系数均在5.22~7.66之间,差别相对较小;其中A1B1、A1B2、A1B3和A1B4的变异系数在5.56~10.28之间,变异范围较大,A2B1、A2B2、A2B3和A2B4的变异系数均在5.22~7.66之间,变异范围较小,因此在不同天气条件下,使用钩提抽薹方式提取蒜薹,操作更稳定。
2.2 不同处理对抽薹效率、薹长、出薹率以及蒜薹和大蒜产量的影响
抽薹效率是指单位时间内蒜薹提取根数,根数越大,抽薹效率越高,单位面积上的蒜薹提取所用时间越少。由图3a可知,A2与A1相比,抽薹效率均有显著提高,分别提高39.26%,35.23%,33.07%和29.77%,其中A2B2、A2B3和A2B4抽薹效率最高,分别达到116.3、116.7和117.7根/(10 min),且显著高于其他处理。
薹长是衡量蒜薹产量和外观品质的重要指标,也是判断抽薹难易程度的重要依据,蒜薹越长,说明抽提时开孔位置越低,蒜薹越短,说明开孔位置越高。从图3b来看,A2与A1相比,蒜薹长度均有显著增加,这说明使用钩提抽薹方式提取蒜薹,均高于同时段及降雨条件下传统按扎抽提方式的薹长;其中A1B1的薹长显著低于A1B2和A1B3,A1B1、A1B2和A1B3薹长显著低于A1B4,A2B1的薹长显著低于A2B2和A2B3,A2B1、A2B2和A2B3显著低于A2B4,说明2种抽薹装置操作下,早上和上午比下午更容易抽提,降雨时蒜薹最容易抽出可达47.7 cm。
出薹率是指蒜薹被成功抽出的根数与抽薹总数之比,抽薹率越高,断薹率越低,蒜薹产量越高,同时也是蒜薹外观的重要指标,断薹多会直接影响消费者购买欲。由图3c可知,A1B1、A1B2、A1B3和A1B4之间相比,各处理出薹率差异均达到显著水平,且A1B1< A1B2 由图3d知,A1B4和A2B4,蒜薹产量分别为5 301.59和5 222.22 kg/hm2,且两处理之间无显著差异,A1B4和A2B4与其他各处理相比,蒜薹产量均有显著提高;A1B1、A1B2、A1B3、A2B1、A2B2和A2B3之间相比,蒜田产量均无显著差异。从蒜薹产量来看,不同抽薹装置对蒜薹产量无影响,降雨对蒜薹产量的提高有显著影响。 由图3e可知,各处理之间蒜头产量无显著差异。由此可知,钩提式蒜薹提取方式与传统按扎式蒜薹提取方式相比,在不同天气条件下,都不会造成蒜头产量下降。 图3 不同处理对抽薹性能的影响 从不同评价员对不同抽薹处理的评价结果来看,A2B4的打分最高为82分,其次为A2B3和A2B2的处理,分值分别为72分和73分,高于A1B1、A1B2、A1B3、A1B4和A2B1处理;A2与A1相比,打分结果均有所增加。这说明通过比较2种抽薹装置,使用者对钩提蒜薹提取装置评价较高。 图4 不同评价员对不同抽薹处理评价结果 已有研究表明[26-28],蒜薹的抽提有铲薹法、夹薹法、剖茎取薹法和扎薹法等,本文中所使用的传统按扎式蒜薹提取方式由扎薹法改进而来。本试验研究表明,钩提抽薹装置在不同时段及降雨时均比传统按扎抽薹装置平均拉力小,这是因为在抽提过程中钩提抽薹装置在开孔的同时,还兼顾上提,使整个抽提过程均保持气压平衡,而按扎法在开孔时必须将蒜薹抽出,一旦没有一次性抽出,蒜茎苞叶和汁液会将小孔堵住而影响气压平衡,从而导致蒜薹很难进行二次抽提。传统按扎抽薹法在下午进行抽提,变异系数最大,除去上述原因,还与蒜薹与蒜薹苞叶摩擦力增大有关。 从本试验研究结果来看,采用钩提抽薹装置的处理抽薹效率均显著高于采用传统按扎抽薹装置的处理,原因是为了实现钩提操作,钩提抽薹装置增加了定位设计,使装置倚靠到蒜茎部的同时,小钉即对准蒜茎中部,从而省去了人工寻找蒜茎中部的时间。本试验结果表明,采用钩提抽薹装置的处理薹长均显著高于采用传统按扎抽薹装置的处理,说明采用钩提抽薹装置可适当减小开孔离地间距,也能顺利将蒜薹抽出。白丁和司文修[29-30]研究认为,蒜薹采收前3~5 d应停止浇水,以减少土壤水分含量和植株对水分的吸收,且抽薹应在晴天中午以后进行,这时植株有些萎蔫、发软,而韧性增加,脆性减少,较易采薹而不易折断。这与本试验研究结果不一致,本试验结果表明,蒜薹下午最难抽出,早上,上午较容易抽出,降雨时最容易抽出。这是因为,下午温度升高,蒜薹与蒜薹苞叶之间失水,从而使蒜薹与蒜薹苞叶之间的摩擦力增大,虽然蒜薹韧性增加,但脆性仍然很强,蒜薹不易抽出;早上和上午较容易抽出,因为夜间露水浸入到蒜薹与蒜薹苞叶之间,由于水分的存在,使蒜薹与蒜薹苞叶之间的摩擦力减小,虽然蒜薹较脆,但摩擦力较小,导致蒜薹更容易抽出;降雨时,蒜薹与蒜薹苞叶之间的水分已达到最大状态,从而使蒜薹最容易抽出。降雨时蒜薹薹长远高于其他处理,是因为蒜薹与蒜薹苞叶之间的水分会不断下移,此时距离地面2~3 cm处进行开孔,即可将蒜薹抽出。从出薹率来看,2种抽薹装置在不同时段及降雨条件下出薹率均无显著差异,降雨时出薹率最高,其次为早上,再次为上午,最低为下午,这与上述原因有关。 由蒜薹产量结果来看,2种蒜薹抽薹装置在不同天气条件下均对蒜薹产量无显著影响,不同天气条件之间比较,降雨条件下蒜薹产量最高,这是由出薹率的提高和抽薹开孔离地间距降低造成的。采用钩提抽薹装置因为在开孔的同时还要进行上提,其空隙要比传统按扎式抽薹装置开口大,从蒜头产量结果来看,各处理之间蒜头产量无显著差异,这说明虽然钩提抽薹装置开孔较大,但并不会对蒜头产量造成负面影响。 从评价结果来看,评价人员对钩提抽薹装置的评价较高,这是因为定位设计的增加,削减了小钉对准蒜茎中部的时间,也减少了人的脑力和体力活动;抽提拉力的减小也降低了蒜薹抽提的劳动强度;变异系数降低,增加了抽薹的稳定性;抽薹条件的选择上,早上、上午和降雨时,天气比较凉爽,有利于进行蒜薹抽提。 1)采用钩提抽薹方式能降低抽薹拉力,提高抽薹的稳定性和抽薹效率,从而降低使用者的劳动强度,减少使用者的劳动时间,并且不会造成蒜头产量下降。 2)上午、早上及降雨条件下是抽薹的最佳时期,特别是降雨条件下,薹长和出薹率最高,分别为47.7 cm和99.7%,蒜薹产量达到5 222.22 kg/hm2。 3)为了有效减轻蒜农抽薹的劳动强度和劳动时间,综合来看,蒜薹抽提的最佳方案为:采用钩提抽薹方式,早上和上午进行抽提,如遇降雨条件,尽量进行抽提。 [1] 肖小勇,李崇光. 我国大蒜出口的“大国效应”研究[J]. 国际贸易问题,2013(8):61-71. Xiao Xiaoyong, Li Chongguang. Study of “power effect” in China’s garlic exports[J]. Journal of International Trade, 2013(8): 61-71. ( in Chinese with English abstract) [2] 张吉国. 中国大蒜出口态势与发展研究[J]. 农业经济问题,2009,30(9):95-99. Zhang Jiguo. Study ofexport situation and development in China’s Garlic Exports[J]. Issues in Agricultural Economy, 2009, 30(9): 95-99. ( in Chinese with English abstract) [3] 林悦香,尚书旗,杨然兵. 大蒜生产机械的现状与发展[J].农机化研究,2012(3):242-245. Lin Yuexiang, Shang Shuqi, Yang Ranbing. Status and development of garlic production machinery[J]. Journal of Agricultural Mechanization Research, 2012(3): 242-245. (in Chinese with English abstract) [4] 王友升,蔡琦玮,谷祖臣,等. 紫外照射处理对蒜薹品质与活性氧代谢影响的多变量解析[J]. 食品科学,2014,35(14):223-228. Wang Yousheng, Cai Qiwei, Gu Zuchen, et al. Multivariate statistical analysis of the effect of UV treatment on quality and reactive oxygenmetabolism of garlic sprouts[J]. Food Science, 2014, 35(14): 223-228. ( in Chinese with English abstract) [5] 朱新华,赵洲,郭文川. 面向采摘机械手的蒜薹力学特性试验研究[J]. 中国农业大学学报,2016,21(7):98-104. Zhu Xinhua, Zhao Zhou, Guo Wenchuan. Experimental study on mechanical properties of garlic-stem for harvesting manipulator[J]. Journal of China Agricultural University, 2016, 21(7): 98-104. ( in Chinese with English abstract) [6] 彭宝良,吕小莲,王海鸥,等. 半喂入自走式大蒜联合收获机[J]. 农业机械学报,2011,42(11):138-141,146. Peng Baoliang, Lü Xiaolian, Wang Haiou, et al. Half-feed and self-propelled garlic combine harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(11): 138-141, 146. ( in Chinese with English abstract) [7] 刘德然,王延耀,王循进,等. 4S-6型大蒜收获机的研制开发[J]. 农机化研究,2010,32(4):96-98. Liu Deran, Wang Yanyao, Wang Xunjin, et al. Manufacture and exploiture of 4S-6 type garlic harveste[J]. Journal of Agricultural Mechanization Research, 2010, 32(4): 96-98. ( in Chinese with English abstract) [8] 魏玉珍,邹栋林,刘勇兰,等. 大蒜直立筛选方法探究及其装置设计[J]. 农机化研究,2017,39(5):122-125,134. Wei Yuzhen, Zou Donglin, Liu Yonglan, et al. Method inquisition and device design of garlic upright screening[J]. Journal of Agricultural Mechanization Research, 2017, 39(5): 122-125, 134. ( in Chinese with English abstract) [9] 武丰,王东伟,李瑞川,等. 大蒜收获机的设计与试验研究[J]. 农机化研究,2017,39(12):89-93. Wu Feng, Wang Dongwei, Li Ruichuan, et al.Design and experimental study no garlic harvesting machine[J]. Journal of Agricultural Mechanization Research, 2017, 39(12): 89-93. ( in Chinese with English abstract) [10] 申世龙,尚书旗,王东伟,等. 大蒜打捆收获机设计与试验分析[J]. 农机化研究,2018,40(10):109-113. Shen Shilong, Shang Shuqi, Wang Dongwei, et al. Design and experimental analysis of garlic bundling harvester[J]. Journal of Agricultural Mechanization Research, 2018, 40(10): 109-113. ( in Chinese with English abstract) [11] 栗晓宇,耿爱军,侯加林,等. 全自动蒜种盒提取投放装置设计与试验[J]. 农业工程学报,2017,33(23):32—37. Li Xiaoyu, Geng Aijun, Hou Jialin, et al.Design and experiment of full-automatic lifting and releasing device of garlic seed box[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 32—37. ( in Chinese with English abstract) [12] 王丹阳,钱彬彬,胡旭,等. 半自动大蒜栽植机关键部件的设计与试验研究[J]. 沈阳农业大学学报,2014,45(5):566—572. Wang Danyang, Qian Binbin, Hu Xu, et al. Key components design and experimental research of a semi-automatic garlic transplanter[J]. Journal of Shenyang Agricultural University, 2014, 45(5): 566—572. ( in Chinese with English abstract) [13] 谢学虎,张永,刘召,等. 大蒜播种机种植机构的设计[J].农业工程学报,2015,31(1):34—39. Xie Xuehu, Zhang Yong, Liu Zhao, et al. Design of planting mechanism for garlic planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(1): 34—39.(in Chinese with English abstract) [14] 耿爱军,张兆磊,宋占华,等. 蒜种盒机械投放过程运动学分析与参数优化试验[J]. 农业工程学报,2016,32(5):29—35. Geng Aijun, Zhang Zhaolei, Song Zhanhua, et al. Kinematic analysis and parameter optimized experiment of garlic box release process[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(5): 29—35. (in Chinese with English abstract) [15] Benjaphragairat J, Sakurai H, Ito N. Study of the mechanics of a 5 hp power tiller attached to a 10-row garlic planter[J]. Agricultural Mechanization in Asia, 2010, 41(1): 40—44. [16] 张华云,郭淑华,王善广,等. 蒜薹薹茎的解剖特征[J].南开大学学报:自然科学版,2002,35(6):113-116. Zhang Huayun, Guo Shuhua, Wang Shanguang, et al.Observ at ions on dissect strcture charact is tics of garl ic scape[J].Acta Scientiarum Naturalium Universitatis Nankaiensis, 2002, 35(6): 113-116. (in Chinese with English abstract) [17] 袁志华,陈翠娟,李华朴,等. 蒜薹拉伸特性研究[J]. 湖北农业科学,2015,54(10):2041-2043. [18] 苗锁成.钳式蒜薹提取器:201620087559.7[P]. 2016-06-29. [19] 中国农业大学.双圆盘蒜薹提取装置:201510598749.5[P]. 2015-12-16. [20] 西北农林科技大学. 一种蒜薹自动采收机械装置: 201310643811.9[P]. 2015-06-03. [21] 丁冬亮. 一种基于单片机的蒜薹自动采收装置:201721125175.0[P]. 2018-04-06. [22] 刘少山. 一种蒜薹抽拔收割机器人: 201720699179.3 [P]. 2018-01-30. [23] 王宪伦.针刺式蒜薹收获机: 201711233547.6[P]. 2018-04-10. [24] 马园圆.一种蒜薹收取工具: 201020542504.3[P]. 2011-04-27. [25] 王崇华,一种回钩式蒜薹提取装置: 201720761415. X[P]. 2017-12-29. [26] 连文. 蒜薹收割小技巧[J]. 农村实用技术,2002(10):59. [27] 王红章. 蒜薹抽取方法介绍[J]. 中国蔬菜,1986(3):31-32. [28] 李继光. 蒜薹收割有技巧[J]. 安徽农业,2002(6):12. [29] 白丁. 蒜薹收获的适期与方法[J]. 现代农业,1993(5): 14-15. [30] 司文修. 蒜薹采收与保鲜技术[J]. 农业科技通讯,1994(5):36. Improvement for positioning hook of bolting device reducing bolting force and improving efficiency for garlic bolt Wang Chonghua (451450,) Aiming at low efficiency and low bolting rate, garlic bolt positioning laboriously and time-consuming in bolting process by the traditional garlic bolting device, a kind of garlic bolting device with hook was designed by measuring the stem diameter. The comparative experiments were carried out to investigate the effects of traditional bolting device and bolting device with hook on bolting force, garlic bolt and garlic yield under different time and rainfall conditions. Eight treatments were conducted, in which 2 bolting devices were provided for 4 weather conditions of early morning, morning and afternoon as well as rainfall condition. The traditional garlic bolting device consisted of a handle, a metal rod and a metal nail, and the angle between the metal nail and the metal rod was 90°. The bolting device with hook consisted of 4 parts: handle, metal rod, positioning design and metal hook, with the angle between metal rod and positioning design ranging from 135° to 180°, and the plane formed by the metal rod and positioning design was perpendicular to the plane formed by the positioning design and the sharp metal hook.Garlic bolt was broken by metal nail of the traditional garlic bolting device, through the observing the position of the metal nails to the middle of the garlic stem while pinching the handle with one hand and bolting the garlic bolt with the other hand. While the garlic bolt was broken by the metal hook by placing the metal hook to the middle of the garlic stem using positioning device and hook with one hand, and bolting the bolt with the other hand. The bolt hole pierced by nailwas smaller and much easilyblockedleading the bolting force too large using traditional bolting device, while the hole was larger and not easily blocked, so that the internal and external pressure of the garlic stem was always consistent using bolting device with hook.The hole was done by Lever action using traditional bolting device, while the hole was done directly through bolting force bolting device with hook.By testing various indices and statistical analysis for 8 treatments, the results indicated that the bolting force could be reduced, the stability and bolting efficiency improved using the bolting device with hook, while the garlic yield was not decreased. The best bolting period were in early morning , morning and rainfall weather conditions. The garlic bolt length, the highest bolting rate and the garlic bolt yield could significantly improved under the rainfall condition especially, reaching 47.7 cm, 99.7%, and 5 222.22 kg/hm2respectively. In a comprehensive way, the best scheme for garlic bolting were in early morning, morning and rainfall conditions using hook bolting method. The conclusion could provide a reference for time and mechanization of bolting. harvesters; agricultural machinery; design; garlic bolt; bolting device; different time periods; rainfall; yield 2018-05-28 2018-10-22 农业部植物营养与肥料学科群开放基金(APF2015009) 王崇华,河南中牟人,讲师,主要从事大蒜生产技术的研究与推广工作。Email:645320876@qq.com 10.11975/j.issn.1002-6819.2019.01.006 S220.2;S221 A 1002-6819(2019)-01-0046-06 王崇华.抽薹装置定位钩改进减小蒜薹抽提力提高效率[J]. 农业工程学报,2019,35(1):46-51. doi:10.11975/j.issn.1002-6819.2019.01.006 http://www.tcsae.org Wang Chonghua. Improvement for positioning hook of bolting device reducing bolting force and improving efficiency for garlic bolt[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 46-51. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.01.006 http://www.tcsae.org
2.3 对不同抽薹处理评价结果

3 讨 论
4 结 论