高速列车的自适应动态面速度位移跟踪控制
2019-01-17徐传芳陈希有郑祥王英李卫东
徐传芳 陈希有 郑祥 王英 李卫东

摘 要:针对列车运行控制中对目标速度和位移的跟踪控制问题,建立了考虑牵引与制动转矩产生动态过程的高速列车运行模型,提出了高速列车的自适应动态面控制算法,在消除"计算爆炸"问题的同时,可以实现对目标速度和位移的高精度跟踪。设计了自适应动态面控制律,将不确定的运行阻力、未知的粘滞摩擦系数以及未测量状态等构成的不确定项看作系统的“总扰动”,并引入扩张状态观测器进行在线估计,扩张状态观测器产生的估计误差由虚拟控制信号中的鲁棒项来补偿,未知参数由自适应律估计得到。基于Lyapunov方法证明了闭环系统是稳定的,稳定状态时,高速列车的位移跟踪误差可以任意小,速度跟踪误差能收敛到零。仿真结果证明了算法的有效性。
关键词:高速列车;跟踪控制;自适应动态面控制;扩张状态观测器;李亚普诺夫
DOI:10.15938/j.emc.(编辑填写)
中图分类号: u260.36 文献标志码:A 文章编号:1007 -449X(2017)00-0000-00(编辑填写)
Abstract: In view of the tracking control on given target speed and position of high-speed train(HST), the operation model of HST was established considering the traction and braking torque generation dynamics. Based on the model, an adaptive dynamic surface control method was proposed to ensure the high-precision tracking on desired speed and position of HST as well as eliminate the "explosion of complexity". In the method, adaptive dynamic surface control law was designed,in which the extended state observer(ESO) was introduced to estimate the "total resistance" of the system resulted from the unavailable running resistance, the unknown viscous friction coefficients and the unmeasured states, the estimation error caused by the ESO was compensated by the robust term of the virtual control signals, and the unknown parameters were obtained online via adaptive law. A Lyapunov-based stability analysis is given, which shows the stability of the closed-loop system,with the position tracking error arbitrarily small and the speed tracking error converging to zero in steady state. Simulation results demonstrate the effectiveness of the proposed method.
Keywords: high-speed train(HST); tracking control; adaptive dynamic surface control; extended state observer
(ESO); Lyapunov
0 引 言
列車运行控制系统是确保轨道交通安全的关键技术之一[1],它分为目标速度位移曲线的优化和目标速度位移的跟踪控制两大环节[2]。目标速度位移优化曲线是控制系统的跟踪对象,获得理想的优化曲线对于高速列车的节能降耗至关重要。然而如果不能实现对目标曲线的精确跟踪,曲线的优化也就失去了意义。为了实现对目标速度和位移的精确跟踪,需要探索有效的高速列车运行模型与控制方法。
反步法采用迭代递推设计的方式,从不含控制输入的第一个子系统开始,向含有控制输入的子系统“反推”进行控制器设计[3-4],具有较强的处理不确定性非线性系统控制问题的能力。文献[5-6]将反步法成功的应用到了高速列车的速度和位移跟踪控制中。文献[5]通过在自适应控制中融合反步控制,实现了对高速列车速度和位移的精确跟踪;文献[6]在文献[5]基础上提出了高速列车的鲁棒自适应反步控制方法,进一步提高了跟踪控制精度。文献[5-6]采用反步法有效地解决了非线性高速列车运行过程中的跟踪控制问题,但是存在需要求取虚拟控制量微分,计算量大的问题[7]。
除了反步控制,PID控制,滑模控制,自适应控制以及基于模糊、迭代学习和神经网络等的智能控制方法也被用到高速列车的速度位移跟踪控制中,并均取得了较好的运行跟踪控制效果[8-13]。但是上述算法均基于牵引/制动转矩(或牵引/制动力)作为控制量的数学模型,这些模型忽略了牵引/制动转矩产生的动态过程,不能反映从控制指令输入到列车运动状态之间的动态关系。
基于以上分析,本文基于改进的高速列车运行模型,提出了高速列车的自适应动态面速度位移跟踪控制算法。在控制器设计中,引入动态面方法,用一个一阶低通滤波器来计算虚拟控制量的导数,以避免以往文献中采用反步控制方法时需要对虚拟控制量多次求取微分,计算量大的问题[14-16]。算法基于考虑牵引/制动转矩产生动态过程的高速列车运行模型,将牵引电机的期望转矩作为系统的控制输入,比以往基于牵引转矩/制动转矩(或牵引力/制动力)作为控制量的数学模型更符合列车的实际运行情况。用扩张状态观测器[17-18]对系统中的不确定项进行在线估计,并在虚拟控制信号中增加补偿项以提高闭环系统性能。仿真结果证明了本文提出的高速列车运行模型以及控制方法的有效性。
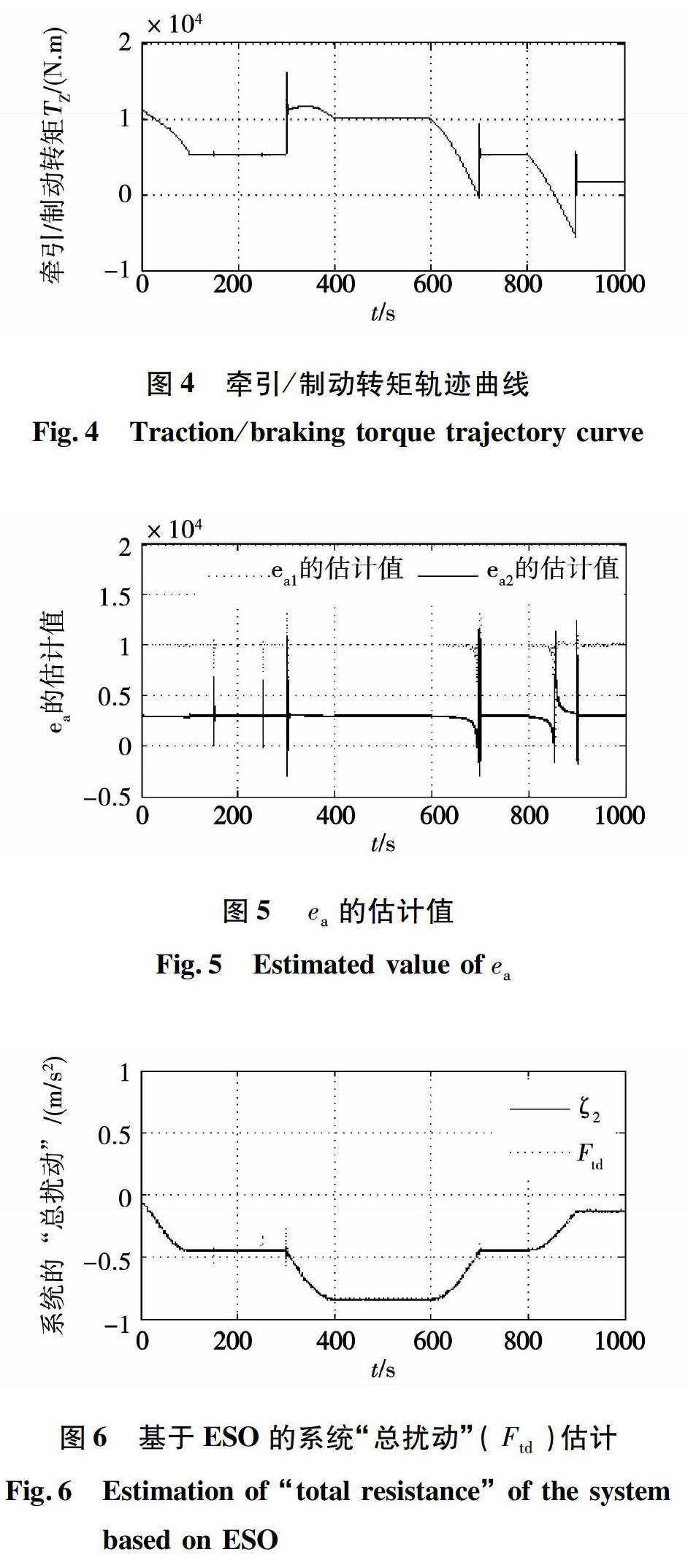
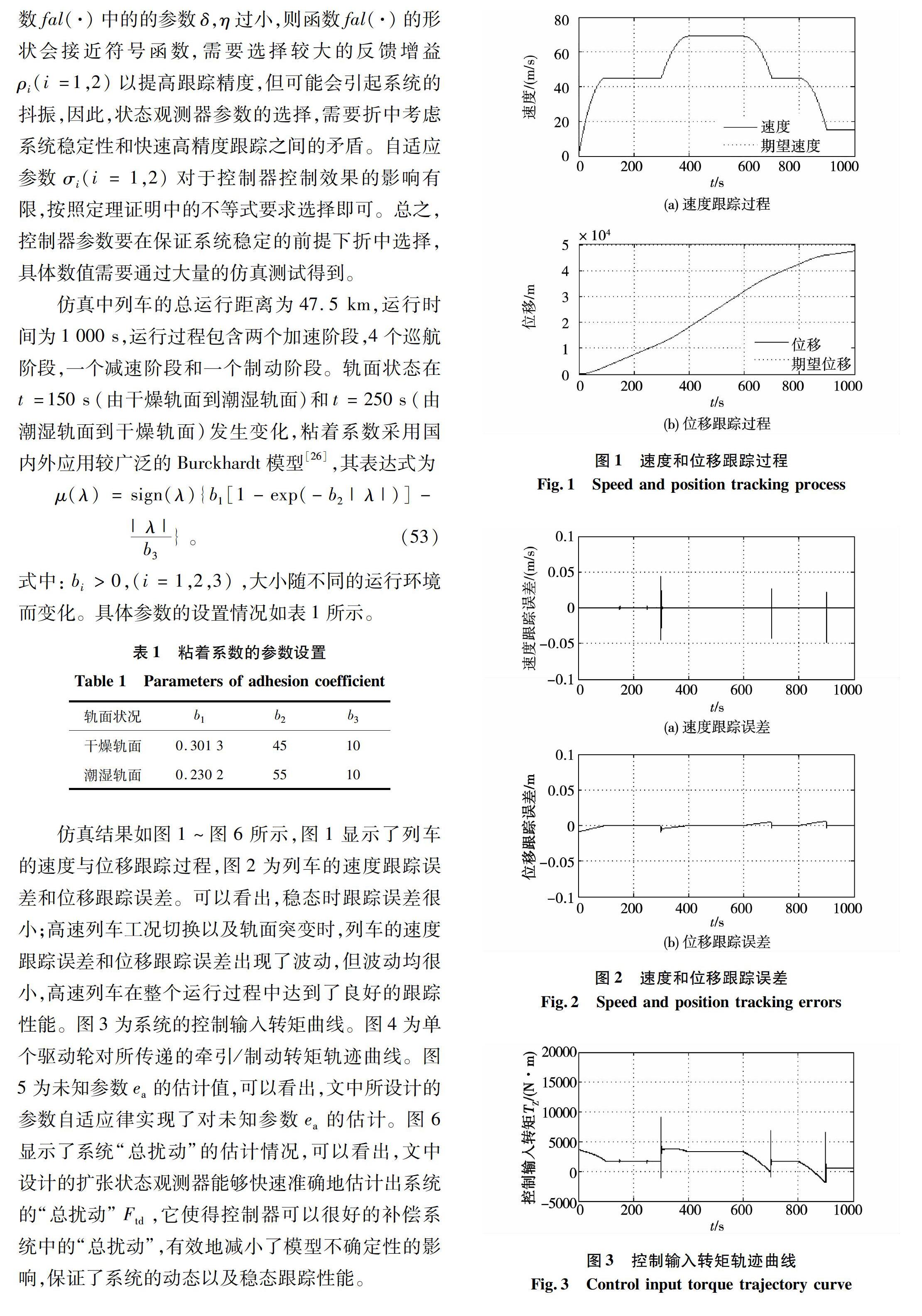
仿真结果如图1~图6所示,图1显示了列车的速度与位移跟踪过程,图2为列车的速度跟踪误差和位移跟踪误差。可以看出,稳态时,跟踪误差很小;高速列车工况切换以及轨面突变时,列车的速度跟踪误差和位移跟踪误差出现了波动,但波动均很小,高速列车在整个运行过程中达到了良好的跟踪性能。图3为系统的控制输入转矩曲线。图4为单个驱动轮对所传递的牵引/制动转矩轨迹曲线。图5为未知参数 的估计值,可以看出,文中所设计的参数自适应律实现了对未知参数 的估计。图6显示了系统“总扰动”的估计情况,可以看出,文中设计的扩张状态观测器能够快速准确地估计出系统的“总扰动” ,它使得控制器可以很好的补偿系统中的“总扰动”,有效地减小了模型不确定性的影响,保证了系统的动态以及稳态跟踪性能。
4 结 论
本文基于考虑牵引/制动转矩产生动态过程的高速列车运行模型,研究了高速列车对目标速度和位移的跟踪控制问题。改进的高速列车运行模型能更好地反映列车的动力学特性,也更符合列车运行实际情况;采用在高速列车运行控制领域应用尚不多见的动态面方法,避免了以往文献中采用反步控制方法需要求取虚拟控制量微分,计算量大的问题;利用扩张状态观测器对系统中总的不确定项进行精确估计,并在控制中进行补偿,有效提高了控制器对不确定与干扰的抑制能力。仿真结果表明,所提出的算法实现了高速列车对目标速度和位移的精确跟踪控制,为高速列车的运行控制研究提供了参考。当牵引/制动系统出现故障而处于容错运行时,由于本文考虑了转矩产生的动态过程,而不是简单地直接面向转矩,因而可以自然地考虑容错运行时动态特性的变化,作者后续将对此展开研究。
参考文献
[1] 宁滨, 刘朝英. 中国轨道交通列车运行控制技术及应用 [J]. 铁道学报, 2017, 39(2): 1-9.
NING Bin, LIU Chaoying. Technology and applica- tion of train operation control system for China rail transit system [J]. Journal of the China Railway S-ociety, 2017, 39(2): 1-9.
[2] 楊杰, 贾利民, 付云骁, 等. 电力牵引货运列车节能运行研究(一):目标速度曲线优化 [J]. 铁道学报,2016, 38(4): 22-31.
YANG Jie, JIA Limin, FU Yunxiao, et al. Energy- efficient freight train operation of electric freight t- rains—part I: Speed profile optimization[J]. Journal of the China Railway Society, 2016, 38(4): 22-31.
[3] Kanellakopoulos I, Kokotovic P V, Morse S.Systematic design of adaptive controllers for feedb-ack linearizable system [J]. IEEE Transactions on Automatic Control, 1991, 36(11): 1241-1253.
[4] 陈晓菊, 张杭, 张爱民, 等. 链式静止同步补偿器自适应反步控制器 [J]. 电工技术学报, 2017, 32(24): 205-213.
CHEN Xiaoju,ZHANG Hang,ZHANG Aimin,et al. Adaptive backstepping controller of cascaded st-atic synchronous compensator [J]. Transactions ofChina Electrotechnical Society, 2017, 32(24): 205-213.
[5] Luo Hengyu, Xu Hongze. Adaptive controller desi-gned for high-speed train ATO system with nonlin-ear and uncertain resistance [J]. Applied Mechanics& Materials, 2013, 301(1): 1551-1557.
[6] Luo Hengyu, Xu Hongze. Direct robust adaptive c-ontrol of high-speed train based on nonlinear andtime-varying models [J]. International Journal of C-ontrol and Automation, 2013, 6(4): 397-411.
[7] 赵希梅, 吴勇慷. 基于自适应修正拉盖尔递归神经网络的永磁同步电机反推控制 [J]. 电工技术学报, 2018, 33(10): 2392-2399.
ZHAO Ximei, WU Yongkang. Backstepping controlbased on adaptive modified laguerre ecurrent neur-al network for permanent magnet linear synchrono-us motor [J]. Transactions of China ElectrotechnicalSociety, 2018, 33(10): 2392-2399.
[8] Chen X, Yue Z, Hai H. Train speed control algori-thm based on PID controller and single-neuron PIDcontroller [C]//Intelligent Systems(GCIS), December16-17, 2010, Wuhan, China. IEEE, 2011: 107-110.
[9] Lin C J, Tsai S H, Chen C L, et al. Extended sliding-mode controller for high speed train [C]// International Conference on System Science and Engineering. July 1-3, 2010, Taipei, Taiwan. IEEE, 2010: 475-480.
[10] 李中奇,杨辉,刘杰民.高速动车组自适应速度跟踪控制 [J]. 铁道学报, 2015, 37(4): 61-68.
Li Zhongqi, Yang Hui, Liu Jiemin. Adaptive speedtracking control for high-speed electric multiple un-it [J]. Journal of the China Railway Society, 2015,37(4): 61-68.
[11] 余进,何正友,钱清泉等.列车运行过程的自适应模糊控制[J]. 铁道学报, 2010, 32(4): 44-49.
YU Jin, HE Zhengyou, QIAN Qingquan, et al. A-daptive fuzzy control of train operation [J]. Journalof the China Railway Society, 2010, 32(4): 44-49.
[12] JI Honghai, HOU Zhongsheng, ZHANG Ruikun.Adaptive iterative learning control for high-speed t-rains with unknown speed delays and input saturat-ions [J]. IEEE Transactions on Automation Scienceand Engineering, 2016, 13(1): 260-273.
[13] Han S H, Byen Y S, Baek J H, et al. An optimalautomatic train operation (ATO) control using gene-tic algorithms (GA) [C]//TENCON 99. Proceedingsof the IEEE Region 10 Conference, September 15-17, Cheju Island, South Korea. IEEE, 1999: 360-362.
[14] D. Swaroop, J. K. Hedrick, P. P. Yip, et al. Dyna-mic surface control for a class of nonlinear syste-ms [J]. IEEE Transactions on Automatic Control,2000, 45(10): 1893-1899.
[15] 孟桂芝,馬克茂. 一类不确定非线性系统的动态面输出调节方法 [J]. 电机与控制学报, 2011, 15(5): 103-108.
MENG Guizhi, Ma Kemao. Dynamic surface outp-ut regulation method for a class of uncertain nonli-near systems [J]. Electric Machines and Control,2011, 15(5): 103-108.
[16] 朱齐丹, 马俊达, 刘可. 基于扰动观测器的无人水面船鲁棒轨迹跟踪 [J]. 电机与控制学报, 2016, 20(12): 65-73.
ZHU Qidan, MA Junda, LIU Ke. A nonlinear dist-urbance observer based on robust approach to thetrajectory tracking of an unmanned surface vehicle[J]. Electric Machines and Control, 2016, 20(12):65-73.
[17] HAN Jingqing. From PID to active disturbance rej-ection control [J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
