多端差动保护的自同步技术
2019-01-16哈恒旭
哈恒旭
(GE电网方案策划部英国有限公司,英国斯塔福德)
1 简介
同步技术在差动保护中发挥了重要作用,因为差动电流是通过将本侧同步电流和从对侧传来的接受电流(以信号瞬时采样值形式或相量形式)相加而计算出的[1]。此时在本侧测得的电流和从对侧出来的接受电流之间存在一个时间差,它包括本侧继电器参考时间和对侧继电器之间的时间差异(信号瞬时值采样时间差异)和通信时间延迟。
GPS既可以为非交换网络也可以为交换网络正确完成同步。GPS信号接收器可以每秒1个脉冲(1PPS)接收本侧和对侧继电器信号。本侧和对侧继电器之间的参考时间差可以通过每秒1个脉冲纠偏,通信时间延迟可以从对侧传来的信号瞬时值标注的时间标签来计算[2-3]。譬如,如果本侧继电器在t1时接收到时间标识为t0的信号瞬时值,将此接收到的信号瞬时值与t0时的本地值排齐,用t1-t0即可计算出通信时间延迟(实际上不必计算)。因此,基于GPS的同步技术可靠而简单,但是,如果GPS信号缺失,就会导致差动保护误动作。
乒乓技术是一种不依赖外部同步装置(如GPS)的自同步方法。本侧向对侧发出“乒”信号。当对侧装置接收到这个“乒”信号,它在下一个采样时间发出一个“乓”信号,以及一个对侧从接收到“乒”信号到发出“乓”信号之间的时间差信息。如此这般,当通信网络的发送与接收通道一致时,就可以获得采样时间差以及通信时间延迟。很明显,乒乓技术只能在非交换网络中正确动作,因为此时发送和返回通信通道是一致的[4]。
事实上,在GPS同步技术广泛用于线路差动保护[5]和故障定位[6-7]之前,人们就已经提出了多种所谓“参考相量同步”的自同步技术用于双端输电系统差动保护。基本概念是:在一个双端系统中,在线路未发生故障情况下,从本侧计算出的节点电压(可以是线路上的任何一点)应该和从对侧计算出的节点电压一致。本侧电流/电压和接收到的对侧传来的电流/电压之前的总时间差应该包含在线路无故障情况下计算得出的本侧节点电压和计算得出的接收到的电压之间的相量差中。总时间差还应该包含在系统无故障情况下计算得出的本侧节点电流和接收到的节点电流之间的相量差中[8]。
多端差动保护自同步技术,是一种基于节点电压比较技术。但是,这种方法只适用于与仅一个节点相连的多端终端,对多终端多节点系统则不太适用[9]。
本文提出一种自同步技术新方法,它基于电流比较(基尔霍夫电流定律)而不是电压比较[9],可以适用于任何多终端多节点的输电系统拓扑网络。本侧电流/电压和从对侧接收到的电流/电压之间的时间差可以通过将在本侧计算出的流至远方支线的节点电流与对侧接收到的电流相比较而得出。基于电流比较,适用的自同步方法关键点在于流至远方支线的电流可以依据本地终端的时间参考值,通过远方支线的等效阻抗/导纳计算得出,可以使用阻抗矩阵来计算流至远方终端的电流,故障时用故障检测仪来锁定自同步功能。当故障发生时,时间差仍然保持稳态时测算值。
本文介绍的算法已经在商业产品中运用。有效结果显示,计算出的时间延迟数值最大误差低于0.08 ms,足够满足差动保护要求。
2 基本原理
为便于介绍这种用于多终端多节点系统、适用的自同步技术计算方法,采用从2个终端输电系统开始讲解,然后讲解多终端、1个节点系统,最后到多终端多节点系统。
2.1 基于电流比较的两终端输电系统自同步技术
在一个两终端输电系统里,如果系统未发生故障,并且两头没有时间差,那么从本侧流入节点J(线路上的任意点)的电流应该与从对侧流出的电流方向相反,且总和为0(就基尔霍夫电流定律),见图1。

图1 两终端输电系统

(1)

(2)
(3)
式中Td——总时间差。
两侧的同步可以通过将本侧电流/电压延时时长Td,和从对侧接收到的电流/电压取得一致而得以实现。
2.2 基于电流比较的多终端单节点输电系统的自同步技术
为说明多终端单节点系统的自同步问题,则选取如图2所示三终端系统作示例。
对多终端单节点系统而言,则无法直接给出本地终端和远方终端之间的总时间差。

图2 三终端系统示例
但是,远方各节点(节点JR1和JR2)可以通过等效阻抗或导纳列出等式,而等效阻抗或导纳可以通过从每个远方终端接收到的节点电压和电流计算得出。
(4)

然后,通过每个远方终端建立的等效导纳,基于本侧流出的节点电流,可以通过以下等式计算出从节点流向每个远方终端的节点电流。
(5)

然后,通过将基于本侧时间差值计算得出的节点电流与从远方终端接收到的节点电流相比较,就可以计算出本侧终端和远方终端R1和R2之间的时间差。
(6)
这种方法可以通过以下方式从3个终端单个节点系统沿用到任意终端单个节点系统。
(1)计算出每个终端的节点电压和节点电流。

(3)使用下列等式计算远方终端的等效导纳。
(7)
(4)基于本侧节点电流,根据下列等式计算流向远方终端的节点电流。
(8)
(5)计算第k个远方终端与本侧之间的时间差。
(9)
(6)同步可以通过延迟本侧电流/电压至所有远方终端时间差的最大值Tdmax=max{Tdk}k=1,…,N-1并将自第k个远方终端接收到的电流/电压延迟至Tdmax-Tdk来实现。
2.3 基于电流比较的多终端多节点系统的自同步技术
为阐释多终端多节点的自同步技术,采用一个如图3所示的6终端、4节点输电系统作示例。

图3 6终端、4节点输电系统示例
与只有1个节点的多终端系统相比,这里最大的难点在于,在这样一个复杂的网络中,如何根据本侧节点电流IJ1L计算自相应节点,如IJ2R2_L,流入远方终端的节点电流。
采用阻抗矩阵来计算相应的节点电压,例如,利用当地节点电流IJ1L,和任何其它流入与节点相连的远方终端的节点电流, 根据当地节点电流,如IJ2R2_L,计算出UJ2_L。
这样一个复杂网络的自同步技术分为以下步骤。
(1)构建一个初始的网络阻抗矩阵,排除运算时间同步算式前已与终端相连接的部分(如图3中以虚线标识的网络部分)。这个矩阵可以标注为ZM。
(2)对与每个节点相连接的每个终端,计算出与终端电压和电流相对应的节点电压和节点电流。
(3)远方终端的所有节点电压和节点电流都发送至本地终端,利用式(7)计算出等效导纳。
(4)将这些远方终端的等效导纳值相加,修改阻抗矩阵。修改后的阻抗矩阵可以标注为ZMR。
(5)将修改后的阻抗矩阵ZMR与电流相量(由本侧节点电流和对侧电流“0”组成)相乘,计算出所有的节点电压。对有N个终端、M个节点的系统,节点电压可以通过以下公式计算得出(假设本侧终端与第n个节点Jn相连)。
(10)
电流相量是由多个“0”和n行的本侧节点电流构成。在这种情况下,在4个可用节点中,本地终端与第一个节点相连,所以节点J1的所有节点电压可以这样计算:

(11)
(6)然后,自相应节点流至远方终端的节点电流可以根据本侧节点电流计算得出。自第n个节点流至第k个终端的节点电流可以表示如下:
(12)
(7)接收端第k个远方终端与本侧之间的时间差可以通过式(9)计算得出
因此,可以采用与一个节点多个终端系统一样的“同时间对准法”实现同步。
3 技术运用
该技术已经数学软件模型验证,可以直接编辑、转换为C编码,然后转化为产品/继电器。
3.1 总体方法
这种本侧与从远方终端接收到的电流/电压之间时间差的总体计算方法见图4。
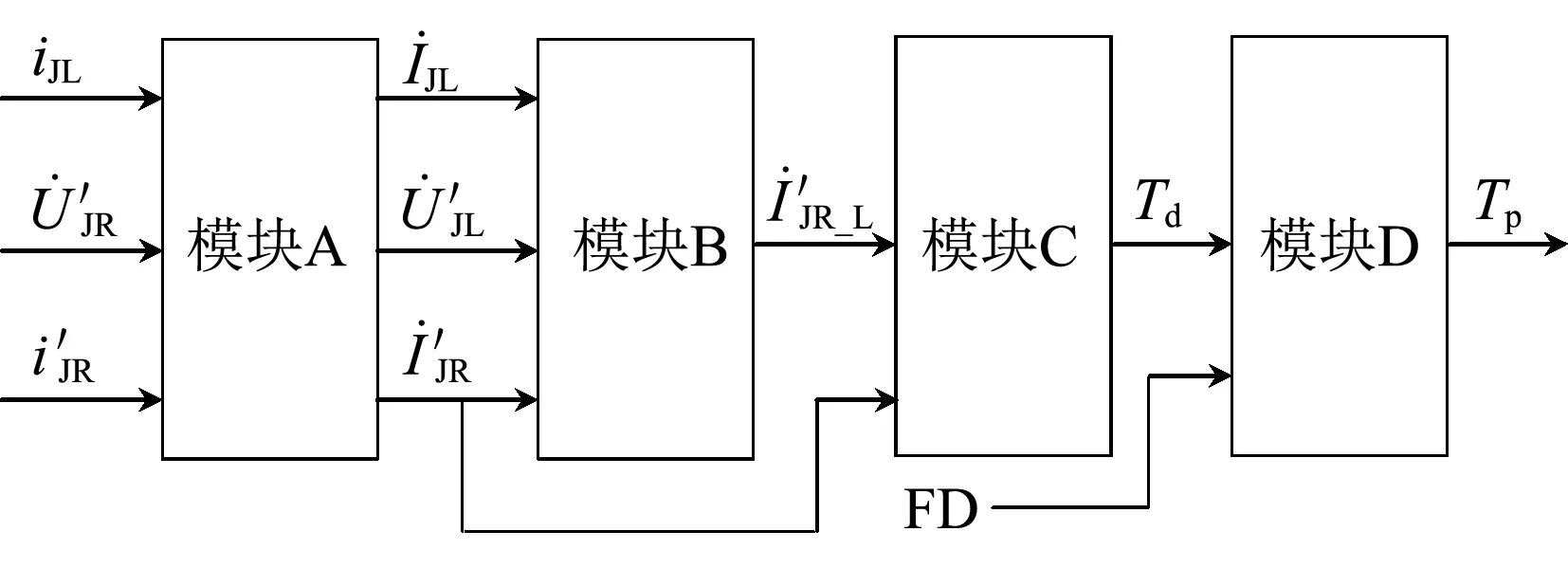
图4 时间差计算的总体方法

模块D包含了控制逻辑,设计用来处理各种运用方案下的自同步。例如,一旦探测到故障(FD是故障探测信号),就必须冻结时间差,就是说,输出值保持为故障发生前的时间差值。
3.2 流至远方终端节点电流的计算方法
利用本地节点电流计算流至远方终端的节点电流的方法见图5。
利用模块E中的支路追加法构建初始阻抗矩阵ZM。终端支路不包含在此初始阻抗矩阵中。例如,在图3所示的系统中,终端支路J1L, J1R1, J2R2, J3R3, J4R4, J4R5没有包含在初始矩阵ZM中,它只包含由J1J2, J1J3, J2J3, J2J4 和 J3J4组成的系统。与相应远方终端相连支线的等效阻抗zeqR在模块F中同时计算出。与相应远方终端相连支线的实时等效电阻被加入模块G中的阻抗矩阵ZM,构成了包含所有远方终端系统的阻抗矩阵ZMR。

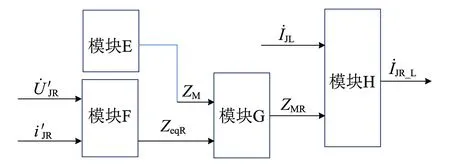
图5 流至远方终端的节点电流的计算方法
3.3 时间差计算
时间差是通过将在本侧终端计算出的节点电流相量与从远方终端传来的电流相比较而计算得出的。例如,在图3所示的系统各种,本侧终端和远方终端R1之间的时间差可以通过式(9)计算得出:
(13)

图6 本侧和其中一个远方终端之间时间差的计算方法
3.4 不同应用方案的控制逻辑
考虑了多种应用方案,以确保自同步功能在多终端差动保护中精确、可靠动作。在此选取了其中最重要的三种方案作介绍。其他未作介绍的方案包括VT 监控、CT监控、通信故障、断路器开闭初始状态等等。
(1)多终端系统出现故障。发生故障时,自同步必须被锁定,自同步输出值保持故障前计算数值。
图7说明了自同步锁定逻辑。当监测到故障,发出FD信号,促使比测器模块选择上端通道,阻止tdOut更新。tdOut输出值保持不变,直至FD信号消失。
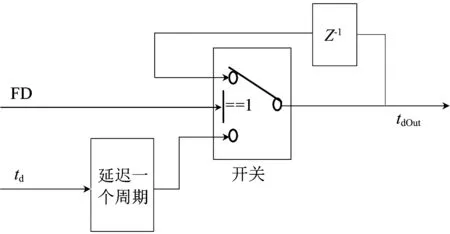
图7 故障时自同步控制逻辑
(2)当本侧和对侧之间时间差超过了一个基础频率周期。对一个50 Hz的系统而言,相当于时间差超过了20 ms。用相量比较法计算出的时间差超过20 ms,这个值就会是一个错误值。例如,如果时间差是23 ms,在50 Hz系统中,自同步模块就会给出一个3 ms的数值。采用了乒乓法担当监控机制来解决这个问题。尽管乒乓法不能给出准确数值,但是却可以给出本侧和远方终端之间时间差的平均值。此方案的解决办法见图8。
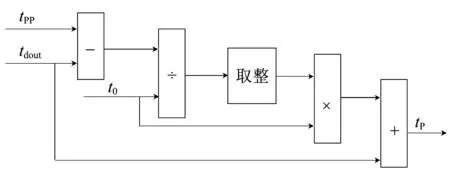
图8 时间差超过20 ms时的解决办法
在图8中,tPP是用乒乓法计算出的时间延迟,t0是一个周期值,50 Hz系统中即是20 ms。50 Hz系统中假定乒乓法计算出的数值是19 ms,那么最后的结果应该是int[(19 ms-3 ms)/20 ms]*20 ms+3 ms=23 ms。
(3)用乒乓法检测结果。根据乒乓法原理,乒乓法计算出来的时间差是从本侧到远方终端和从远方终端到本侧时间差之间的平均值,即:
2tPP=tp+tpR
(14)
式中tPP——乒乓法计算出的时间差;tp——由本侧自同步模块计算出的时间差;tpR——远方终端自同步模块计算、传输至本侧的时间差。
图9说明了乒乓法如何检测控制。

图9 乒乓法的检测控制
基本理念是如果abs(2tPP-tp-tpR)>tThres(tThres=2.5 ms,50 Hz系统中自同步最大允许误差为单向1.25 ms,因此极限值为1.25 ms的两倍),然后整个差动保护被闭锁。
4 验证和测试结果
采用电力系统真实数据,运用RTDS和PSCAD电力系统仿真模型生成的COMTRADE文件,完成了大量验证测试。
为本文介绍的自同步技术方法所作的测试结果是基于一个典型的6终端、4节点400 kV、50 Hz输电系统,如图10所示。系统用PSCAD建模,为测试专门生成了COMTRADE文件。

图10 典型的6终端、4节点400 kV输电系统图
本文中的验证结果采用基本取样比率2 400 Hz(即每个周期48个样本)、运用分布参数模型来计算电容电流补偿。因受继电器内部消息帧带宽的限制,自同步和多端差动保护的二次取样比率是800 Hz(即每个周期16个采样点)。各部分的线路参数是相同的,如表1所示。
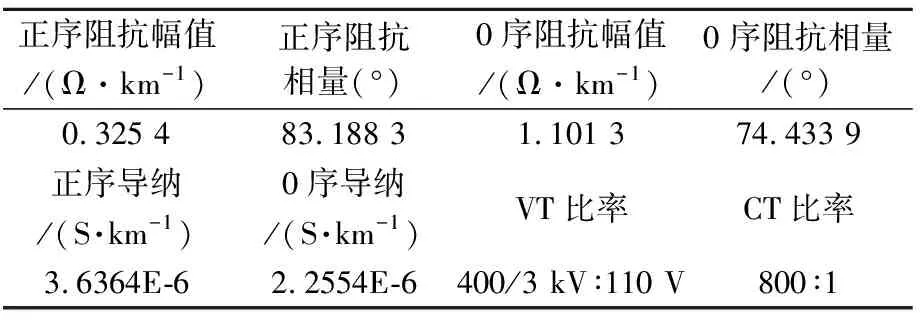
表1 图10中的系统参数
4.1 本侧和远方终端之间的时间差
同步模块计算出的时间差数值见表2。计算出的时间差特征见图11。

表2 通过自同步计算出的时间差
从图11可以看出,自同步在0.1 s时开始工作,这是系统在PSCAD处理需要花费的时间。1.0 s时,因故障探测器检测到故障,输出结果自保持。

图11 时间差特征
4.2 基于自同步计算结果得出的差动电流和偏流
基于自同步计算结果,区内A相接地故障和区外3相故障的差动电流Idiff和偏流Ibias呈现特征分别见图12和图13。
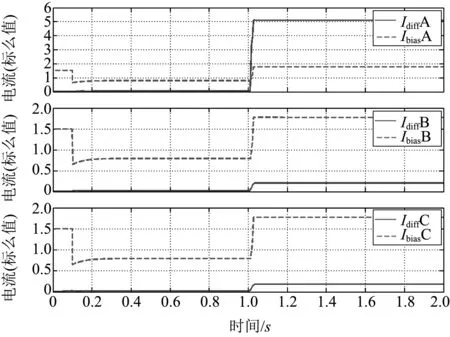
图12 内部A相接地故障(50ohm故障电阻)的差动电流Idiff和偏流Ibias

图13 外部3相故障(50ohm故障电阻)的差动电流Idiff和偏流Ibias
4.3 基础频率周期的时间差
对50 Hz系统,将远方终端和本侧之间的时间差设置为超过20 ms。计算出的时间差值见表3。大量的验证显示最大误差不超过0.08 ms。
5 结语
本文介绍了一种新的自同步方法来作为对GPS自同步技术的补充,适合多终端系统差动保护,可适用于多终端多节点输电系统。它首先采用阻抗矩阵来计算节点电压,然后根据远端等效阻抗/导纳分别计算流入远方终端的节点电流,然后将计算出的远端电流与接收到的远方终端的电流相位差比较,最终计算出传输时间差。最后用时间差数据对终端电流时间校正,实施差动保护。这种技术已经被用于商业产品,大量的验证显示计算的时间差最大误差小于0.08 ms,完全满足差动保护的要求。

表3 接近或超过20 ms的时间差