超轻型火炮自动调炮技术研究
2019-01-14贾彦斌李荧兴武彦君
贾彦斌,李荧兴,曹 帅,武彦君,张 稳
(北方自动控制技术研究所,太原 030006)
0 引言
随着战场环境日益复杂,针对处突、反恐等区域性、低强度局部战争的任务需求,要求兵力和装备快速空运和空降到战场。超轻型火炮重量轻、支援火力强,可由直升机吊运,实现山地、滩涂、丛林、海岛快速机动,可满足快速反应部队需求。其中,超轻型火炮的快速、高精度自动调炮是快速反应的一个重要组成部分。
火炮的超轻型设计会导致柔性的影响更加突出,同时,随着火炮高低角度的增加,火炮重心上移,火炮基座相对于柔软地面容易产生相对运动和晃动,影响调炮动态过程及精度。柔性环节是真实存在而无法消除的,但是可以柔化参考信号,使控制器的控制信号柔顺地介入,不激励火炮的柔性环节;采用前馈复合控制方案,使火炮对参考输入快速响应。
另外,火炮采用惯性导航仪作为角度传感器,敏感火炮身管在大地坐标系下的北向角及倾角,与调炮诸元进行比较,输出速度控制量,控制火炮方位、高低运动趋近于调炮诸元,实现自动调炮控制。然而,火炮的控制量基于大地坐标系,在作用于炮塔坐标系之前,需要对控制量进行交叉解耦,将大地坐标系下的控制量映射到炮塔坐标系。
1 自动调炮控制原理
自动调炮控制的结构框图如下页图1所示,控制器由柔化器、方位/高低控制器和解耦器等模块组成;控制对象为火炮的方位和高低两个机构,包括执行机构和运动机构两个部分;惯性导航仪作为反馈组件安装在炮身管上,敏感火炮方位/高低运动在大地坐标系下的映射。
方位/高低射击诸元是阶跃输入信号,会激励系统丰富的频谱,包括火炮结构柔性频率和基座与柔软地面的相对柔性频率。射击诸元经过柔化器柔化处理,在一定程度上弱化了对系统各柔性环节的激励,作为控制器的参考输入,可有效地规避柔性环节的影响。
阶跃输入经过柔化处理后,可提取微分信号,作为复合控制器的前馈信号。柔性参考输入可能导致系统响应缓慢,采用前馈的复合控制器能提升系统的响应速度。
解耦器根据惯性导航仪的倾角数据将大地坐标系下的控制量映射到炮塔坐标系,驱动火炮方位/高低运动。
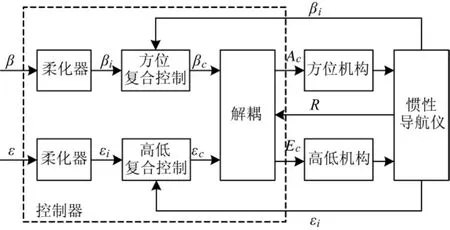
图1 自动调炮控制的结构框图
2 自动调炮控制设计
2.1 柔化器
阶跃输入信号能够激励系统丰富的频谱,常常作为系统传递函数辨识的激励信号。但是,在控制系统的应用场合,不希望系统的某些频段被激励出来,如系统内柔性环节或基座与地面的非刚性连接造成的结构谐振。在文献[1]中提到一种柔化输入信号的方法——“跟踪微分器”,用于安排过渡过程,能够解决PID控制器的“快速性”和“超调”之间的矛盾,提高控制器“鲁棒性”。“跟踪微分器”根据对象的承受能力,按最快的方式安排过渡过程,选择加速度先正后负,正部分面积与负部分面积相等,其加速度、速度和位置曲线如图2所示。

图2 “跟踪微分器”加速度、速度和位置曲线
图2(c)是期望阶跃响应的柔化结果,具有加速度绝对值恒定(图2(a))特点,能够按最快的方式跟踪阶跃输入信号。但是,加速度绝对值恒定存在加速度符号变化的冲击,在加速度符号变化时,出现一个阶跃信号,如图2(a)所示。在超轻型火炮的自动调炮控制过程中,不期望出现加速度阶跃的情况,因此,可以在“跟踪微分器”的思路上进行改进,设计一种加速度连续变化的柔化曲线来安排过渡过程。
选择加速度先正后负,正部分面积与负部分面积相等,但是加速度绝对值不是恒定不变的,而是按照正弦规律变化。正弦加速度周期是安排过渡过程所需的时间,定义为T,正弦加速度的模型定义为

速度模型为
位置模型为

这种以正弦加速度曲线安排过渡过程进行输入柔化的模型叫做正弦柔化器。过渡过程时间T=10 s,根据式(1)~ 式(3)分别绘制加速度、速度和位置曲线,如下页图3所示。
2.2 复合控制算法
自动调炮控制算法采用PID加前馈的复合控制结构,如图4所示,除饱和限制和输出滤波外,控制算法由4部分组成:比例、积分、微分和前馈项。

图3 正弦柔化器的加速度、速度和位置曲线

图4 自动调炮控制算法结构框图

考虑微分会引入和放大噪声,所以对位置反馈信号微分并提取速率信号时,采用FIR低通滤波器将微分后的信号高频部分滤除,保留低频部分,反馈信号的速率提取为

其中,bk为FIR滤波参数,在MATLAB中使用fir1命令可实现基于窗函数的FIR滤波器设计;h为控制系统采样时间;θf为位置反馈。
由于前馈信号v(t)是参考输入信号的微分(式(2)),那么微分项的表达式为

前馈项的表达式为

由式(5)、式(7)和式(8),复合控制算法表达式为

另外,复合控制算法的输出还具有饱和限制及输出滤波环节。
2.3 解耦器设计
惯性导航仪安装于火炮身管,随火炮方位高低转动,传感火炮身管相对于大地坐标系下的方位/高低,而驱动火炮方位/高低运动的控制量则是在炮塔坐标系,火炮炮塔通常工作在非水平条件下,因此,控制和反馈之间存在交叉耦合。
在炮塔倾斜工作条件下,惯性导航仪敏感到的方位或高低任何一个方向的角度,都是火炮方位/高低的运动耦合。将水平坐标系下的控制量映射到炮塔坐标系,可解决该耦合问题。根据炮塔转动过程中的横倾(用R表示)和纵倾(用P表示),将水平坐标系下的控制量映射到炮塔坐标系。水平坐标系下的控制量用表示,炮塔坐标系下的控制量用表示,则解耦关系为

其中,T(P)和T(R)分别是横倾和纵倾转换矩阵
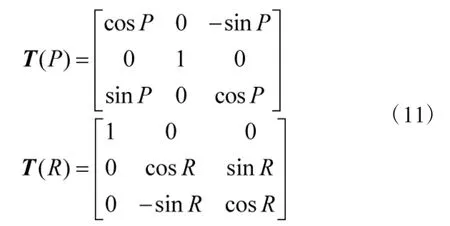
根据式(10)和式(11)可得

由于惯性导航仪是超轻型火炮的唯一反馈传感器,它的安装方式决定其只能测量火炮身管的倾角。惯性导航仪敏感的北向角和纵倾角分别为火炮身管的方位角和高低角;敏感的横倾角为火炮身管的横倾角,根据火炮身管耳轴与炮塔基座的连接关系可知,该横倾角也是炮塔的横倾角。
式(13)表明高低控制量EC是关于横倾角R的非线性组合与纵倾角P余弦的乘积。由于纵倾角不可观测,角度范围[-6,6]°,则 cosP∈[0.99,1],自动调炮控制系统具有足够的稳定裕量消除该增益的变化,由此,高低控制量的解耦模型可以写为

3 试验与结果
3.1 试验环境
自动调炮控制系统试验环境如下页图5所示,控制箱自动调炮控制算法运行于DSP28335芯片,接收调炮诸元,实时采集惯性导航仪反馈信号,计算输出火炮方位/高低控制量,实现自动调炮闭环控制。
计算机与控制箱之间通过调试器经由USB和JTAG接口连接,可读取控制箱内的运行数据。计算机安装MATLAB和Code Composer Studio IDE(以下简写为CCS)软件,MATLAB和CCS之间通过Link for CCS IDE接口实现数据连接,可以利用MATLAB强大的数据分析和可视化功能,节省设计和调试程序的时间。

图5 试验环境
3.2 试验结果
火炮最大速度和加速度分别为3°/s和6°/s2,自动调炮范围设定为30°(500 mil),因此,火炮完成30°行程的最短时间为10.5 s,按照过渡过程为T=10.5 s安排过渡过程,则正弦加速度的幅值。过渡过程曲线采用归一化处理,在实际系统中需要将过渡过程曲线乘实际幅值。
微分FIR滤波器采用Hamming窗函数设计,16阶低通10 Hz滤波。输出滤波器采用一阶IIR滤波器,带宽50 Hz。控制器其他参数根据实际系统进行整定,保证控制系统运行稳定可靠。方位/高低控制系统相似,以高低系统的响应最为重点研究对象。
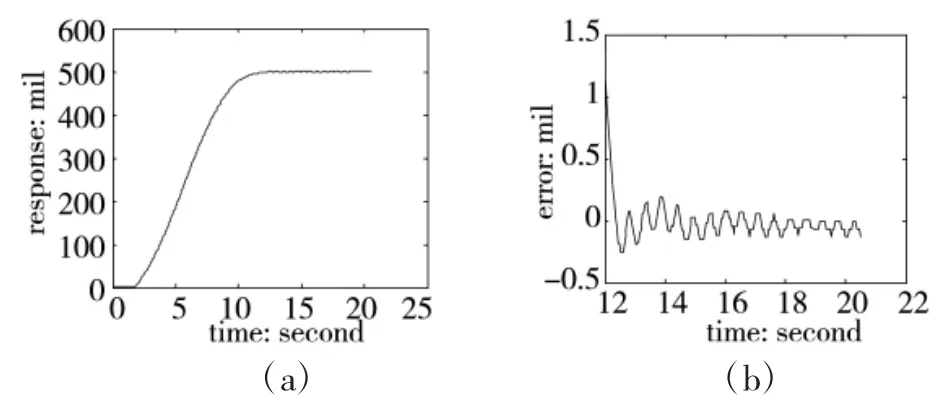
图6 超轻型火炮自动调炮控制系统的响应曲线
图6(a)是高低 500 mil给定响应曲线,图6(b)是高低误差响应曲线。由图可知,采用安排过渡过程和复合控制的方法没有激励系统的柔性谐振频率,但是也没有消除谐振频率的影响,如图6(b)所示,而是将谐振频率的影响控制在容许的范围内。自动调炮系统最终的精度控制在0.5 mil范围内。
4 结论
针对超轻型火炮具有柔性环节和基座晃动等特点,研究一种自动调炮技术,采用柔化输入、复合控制算法、输出解耦等方法,能够满足超轻型火炮的自动调炮控制要求。
