基于鱼群效应的无人驾驶车辆编队算法研究
2019-01-11田大新
田大新,康 璐
(北京航空航天大学车路协同与安全控制北京市重点实验室,北京 100191)
1 引 言
截至2017年底,我国汽车保有量达2.17亿辆,随着汽车保有量的持续增长,道路承载容量在许多城市已达到饱和,交通安全、出行效率、环境保护等问题日益突出。传统以修建或扩展道路解决交通问题的方法随着城市发展和土地资源越来越紧缺已变得不再可行。在这种背景下,把车辆和道路整合起来,以计算机、通信及自动控制等先进技术为手段,旨在系统高效地解决交通拥堵、交通安全、交通环境等问题的智能交通系统(Intelligent Transportation Systems,ITS)应运而生。车路协同系统(Cooperative Vehicle Infrastructure Systems,CVIS)作为ITS 的重要组成部分,一直是世界交通发达国家研究、发展与应用的热点[1-2]。
车路协同系统基于先进的传感和无线通讯等技术,通过车车、车路动态实时信息交互,全时空动态交通信息采集和融合,保障了在复杂交通环境下车辆行驶安全、实现道路交通主动控制、提高路网运行效率[3]。
作为车路协同系统中的一个重要技术热点和前沿课题,车辆编队可以在很大程度上提高车辆队列的柔韧性与灵活性。而无人驾驶汽车装备车载传感器,雷达,GPS以及摄像头等多种感应设备,感知周围复杂变化的环境,规划路线,同时,有效规避驾驶员的诸多不良驾驶习惯,消除由驾驶员因素导致的诸多交通安全隐患,实现车辆在道路上安全、可靠的行驶。因此,无人驾驶车辆编队是车路协同系统潜在的新技术。
2 国内外研究现状
无人驾驶车辆编队问题的研究来源于多智能体系统(Muti-Agent System,MAS)任务规划及协作问题的研究,它主要是针对多无人驾驶车辆在复杂多变的交通环境下,通过调节自身的行驶速度和转向,使得自身与附近行驶的无人驾驶车辆之间保持相对稳定的几何位姿及运动状态,同时又满足任务需求和适应周边环境约束(譬如避障等),从而实现多无人驾驶车辆之间以无线通信为纽带的协同行驶行为。无人驾驶车辆编队主要涉及到的技术包括:无人驾驶车辆的组合定位与多传感器多源信息融合技术,无人驾驶车辆的协同编队控制技术,以及无人驾驶车辆协同系统的感知与通信技术。其中无人驾驶车辆的协同编队控制技术是研究无人驾驶汽车编队问题的关键。
无人车编队的控制策略主要分为两个方面,车辆之间信息的交互,以及车队队形控制算法的设计。国内外学者在编队控制具体算法方面已进行了大量的研究,目前相对比较成熟且通用的编队车辆队形控制算法主要有领航者-跟随者法(Leader-Follower)、虚拟结构法(Virtual Structure)、基于行为法(Behavior Based)、人工势场法(Artificial Potential Field)等。譬如钱臻[4]就给出了一种基于组合定位技术的高精度车辆编队方法,将视觉数据和激光测距数据引入到GPS-DR组合定位技术中,研究出了一种新的组合定位方法,解决了车辆编队系统中存在的GPS定位精度较差,存在误差漂移的问题;俞志英[5]给出了一种基于反馈线性化的车辆编队方法,通过设计带有固定离轴点和不定离轴点的输入输出反馈线性化的跟踪控制器,使得跟随车辆能够与领航车辆保持期望的距离和角度行驶;此外,俞志英[6]还针对具有网络传输延时和噪声的多车辆系统的编队问题,提出了一种基于自适应卡尔曼滤波器的协作路径跟踪控制方法。但目前传统的车辆编队算法主要都是在稳定性及编队效率中进行取舍,同时,大多研究将群体作为一个整体系统出发,直接考虑对整体的控制,没有将整体队形和个体运动有机地结合起来。
由于生物群集行为去中心化的邻近个体交互、整体的自组织性等特点与车辆自主集群编队协调控制的局部性、分布式和鲁棒性等要求有着紧密的契合之处,国内外学者均开始研究仿生群体智能在交通运输领域的可应用性。与其他生物群体相比,鱼群以在无“指挥者”情况下的强大的凝聚力和高度平行顺向性的自组织行为著称。鱼群效应指的是鱼群在没有特定的“指挥者”的情况下,通过观察自己邻居个体的侧线来调整和控制自己游行的速度和方向,从而保证整体游向的一致性,以及个体相互之间合适的距离。范政武等[7]给出了一种利用鱼群参数分析车辆平顺性的方案,并对影响汽车平顺性的重要参数进行优化分析,优化结果有效提高了重型车的平顺性能;姜山等[8]提出了一种遗传算法及人工鱼群混合优化算法,有效解决了传统交通分配Frank-Wolfe算法收敛速度较慢、计算负担较大的问题;刘炳全等[9]给出了一种可应用于多等级选择的离散型交通网络二层规划模型设计中的基于人工鱼洄游模型的交通路网设计方法;蒋颖丽等[10]给出了一种基于鱼群算法的拥堵疏散策略,用鱼的觅食、追尾、聚群等行为模拟疏散个体的心理活动、路径选择、行为倾向等,对人员疏散过程进行仿真,最后形成整体疏散路径方案;Tian[11]给出了一种基于鱼群算法的学习式车辆移动模型,通过学习鱼群间的协同行进、合作避障等自组织行为,有效提高了联网车辆的行车安全和通行效率。
本文将鱼群集群行为机制引入到车辆群体编队顶层控制中,通过借鉴鱼群集群行为与避障行为(如表1所示),针对车联网环境下,同一时间段行驶在同一道路上的同向车辆(如图1所示)建立车辆群体编队控制模型。以群体中的个体的行为为重点研究对象,结合群体行为整体效果,从微观角度展开对群体行为的研究。
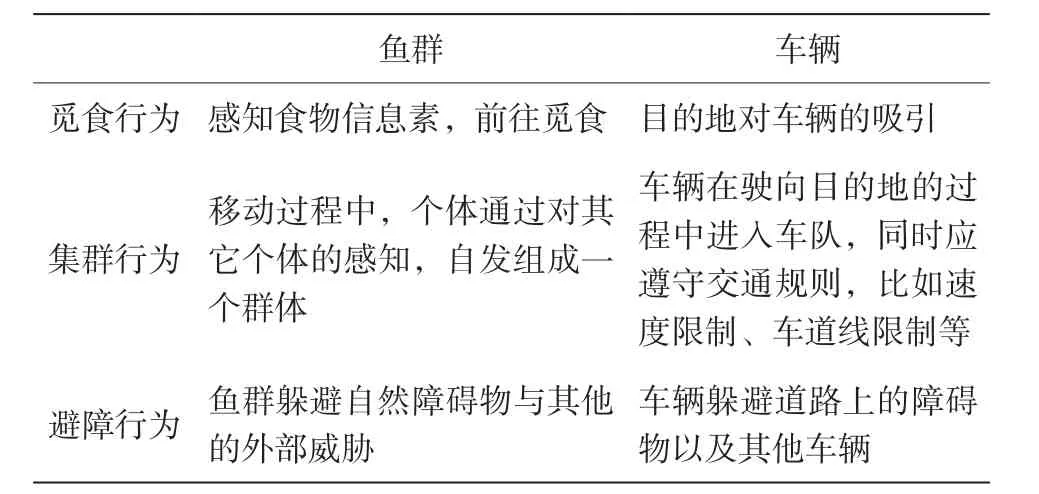
表1 鱼群与车辆的行为对比Table 1 Comparison of behavior between fish and vehicles
3 基于鱼群效应的无人车辆编队控制算法
假设无道路中心线的道路上,有n辆无人车辆,将模型关注的目标车辆记为i,目标车辆i在时刻t的位置记为同时,假设所有车都能实现车车通信且所有车辆的通信范围是相同的,记通信半径为R0,该通信范围是由通信技术特定的同时也能决定目标车辆i的邻居车辆的集合,在本文中,目标车辆可以通过车间通信获得在其感知半径范围R0内的邻居车辆的速度、位置及其他行驶信息,并与邻居车辆通过引力和斥力的形式相互作用。

其中, 表示i的质量, 是i运动的加速度, 表示作用到群内个体i上的第k个分力, 表示所有作用在群内个体i上的合力。 是由多个作用力 共同形成的。
为了准确描述交通情况,不仅需要考虑群体内部车辆间的相互作用力,还需要考虑障碍物和道路边界的斥力作用。基于上述考虑,将所有作用在目标车辆i上的合力记为:

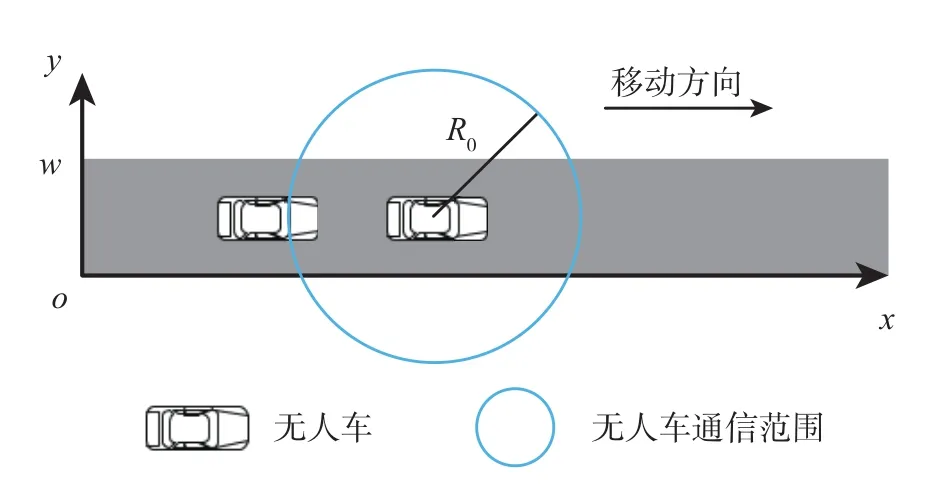
图1 无人车辆编队示意图Fig.1 Diagram of formation of unmanned vehicle
即,速度控制分量大致可分为四项:对齐控制分量、避撞控制分量、边界限制控制分量以及速度限制分量。当个体在规定区域内时,边界对个体存在斥力;在区域外时,边界限制控制分量使得群体中心趋向区域中心。
类似于鱼群的对准原理,每个车辆也倾向于保持与相邻车辆一致的方向,即车辆i在t时刻的移动方向是其邻居在t-1时刻的平均加速度。因此,t时刻车辆i的移动方向表示为:

于是,可以得到:

其中,车辆之间的力分为排斥力和吸引力。
根据车辆动力学方程,目标车辆i与其邻居车辆保证不发生碰撞的极限距离为:

其中,g是重力加速度,μ是轮胎和道路之间的摩擦系数。
当i和j之间的距离大于时,是吸引力,记为并且越大,也越大;而当i和j之间的距离小于时,为排斥力,记为与上述情况相反,越小,越大。我们引入一个负指数函数来描述这一随距离变化而变化的作用力:



为了确保车辆在车道的范围内行驶,同样的,将道路边界对车辆i的作用力抽象为吸引力与排斥力。表示为:


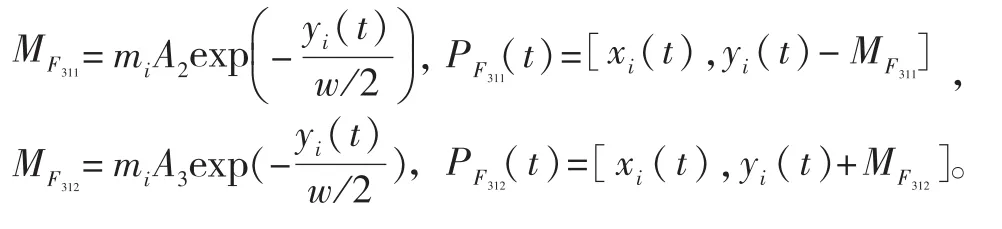
w为道路宽度,A2,A3为系统参数, 是t时刻时目标车辆i的纵坐标。
此外,为了保证车辆在正常速度范围内行驶,引入了一个速度控制模型:

同样的,A6,A7也是系统参数。
4 仿真结果及分析
对上述编队控制算法进行仿真分析,建立如图1所示坐标系,x轴为道路横向距离,y轴为道路纵向距离,在同一道路截面随机生成3辆车,均假设为质点,所有车辆初始速度在15~30m/s的范围内随机生成,同时,考虑到现实因素,本次仿真中车辆最大速度设置为30m/s,最大加(减)速度设置为10m·s-2,模拟时间设定为1h,在仿真过程中,所有车辆状态信息每0.01s更新一次。模型中的参数设置如表2所示。

表2 参数设置Table 2 Parameter settings
车辆轨迹的MATLAB仿真图如图2所示,水平轴代表道路横坐标,垂直轴代表道路纵坐标。不同线型的曲线表示不同车辆的行驶轨迹,从图中可以看出,车辆经过一段时间的行驶后轨迹重叠在一起,这表明车辆此时正排成一行。这与仿真的预期目标是一致的。
图3所示为车辆速度随时间变化的仿真图,水平轴代表时间,垂直轴代表车辆速度。同样的,不同线型代表不同车辆的速度,考虑到车速限制模型的作用,所有车辆速度最终保持在最大速度30m/s上下浮动,同时,由于这三个作用力的合力在水平方向上并不完全为0,导致车辆加速度不完全为0,速度呈现小范围的振动。这也与仿真设定的初始目标一致。

图2 车辆行驶轨迹图Fig.2 Diagram of vehicle trajectories
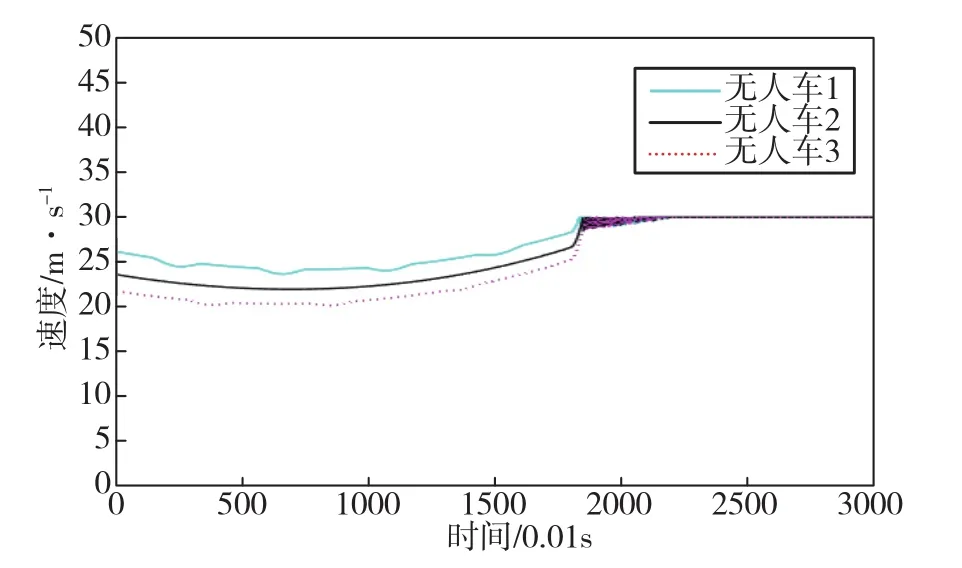
图3 车辆速度图Fig.3 Diagram of vehicle speeds
图4为车辆间距随时间变化的仿真图,其中,水平轴代表时间,垂直轴代表车辆位置差,不同线型代表不同的车辆间距。在假设为质点的条件下,稳定状态下无人车辆之间的安全间隔只取决于车辆执行器的反应时间 及信息传输的迟延 ,在该部分仿真中,设置为(0.075+0.054)s[12-13],根据图3可知,车队达到稳定状态时,车辆速度稳定在30m/s,因此可得此时的车辆安全间距为3.87m。在三车系统中,有条间距线,从图4中我们可以看到在稳定状态下,所有车辆间距都大于安全距离,与仿真的预期目标一致。
图5为基于鱼群效应控制算法与Leader-Follower算法在上述同等条件(道路状况、车辆状态等)下的编队效率对比图,其中,横坐标为车辆通信范围,纵坐标为编队队形达到稳定状态所需的时间。从仿真结果可以看出,通信范围越大,两种控制算法编队效率均有提高,且基于鱼群效应的控制算法的编队效率相对来说提高得较快。这在一定程度上说明了文章所提算法在编队效率上较优于传统的Leader-Follower控制算法。
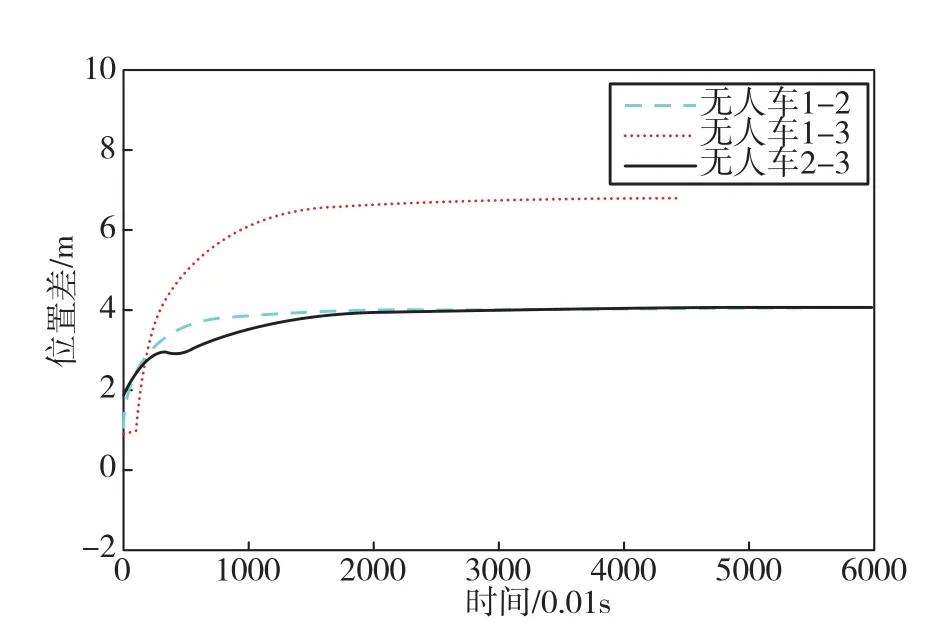
图4 车辆间距图Fig.4 Diagram of vehicle spacing
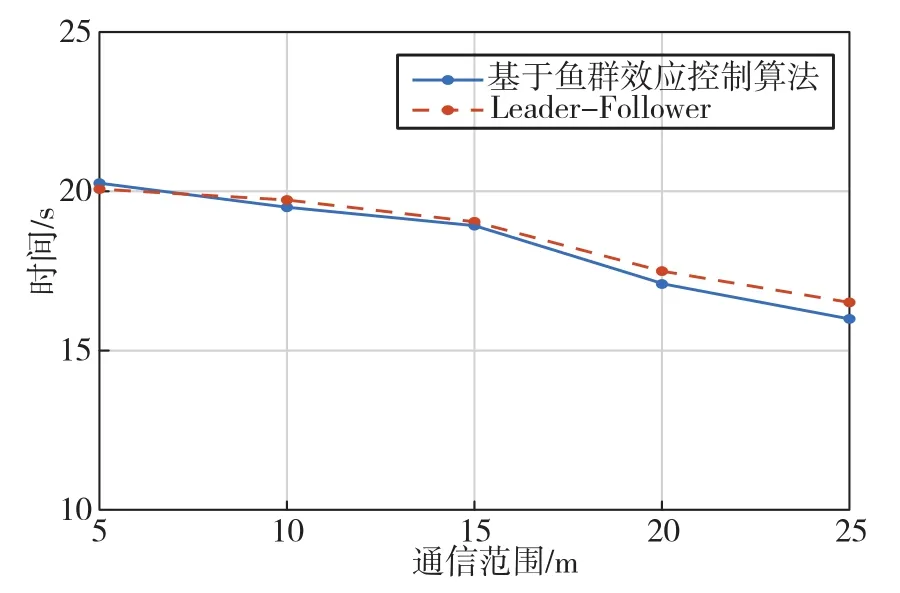
图5 编队效率对比图Fig.5 Comparison of formation efficiency between Leader-Follower and Fish-based Control Algorithm
5 结 论
本文将生物集群行为映射到车辆编队控制中,以群体智能和鱼群行为研究领域已有的建模方法为基础,结合实际道路车辆行驶特性,归纳真实世界中交通因素,如道路的约束、交通规则的限制、路况和周围车辆的影响,通过控制车辆在道路行驶中的四个关键要素(目的地的吸引、车车之间的相互作用、车道边界的限制、车辆速度限制),建立并通过MATLAB仿真实现了车联网环境下无人车辆编队行驶模型。但是,鉴于车辆自组织网络通信半径R0设置值与现实中存在较大的偏差,导致编队控制效果并不突出,接下来拟建立IEEE802.11P通信协议下的控制模型,同时引入V2I(Vehicle-to-Infrastructure)通信,进一步验证将鱼群行为理论应用于无人驾驶车辆编队控制研究的可行性。
