无人机感知规避技术发展与挑战
2019-01-11康童娜赵春晖胡劲文
潘 泉,康童娜,吕 洋,赵春晖,胡劲文
(西北工业大学自动化学院,西安 710072)
1 引 言
未来的无人机将向着实战化、智能化、多能化的方向发展,并可实现与有人驾驶飞机的混合编队,能全天候、全空域执行侦察、预警、通信、精确打击、核打击、战斗支援、救援、补给甚至自杀性攻击等多种任务[1]。无人机的感知与规避功能是指无人机系统通过传感器和数据链路实现对空中交通环境的有效观测、评估和威胁判断,在此基础上,针对可能的碰撞威胁生成有效的规避路径和机动控制,从而实现碰撞规避和保障空域交通安全。
随着军民领域对无人机的需求日益强烈以及空域的进一步开放,未来空域将日趋密集,呈现无人机、有人机空域共享的复杂空中交通态势,现有空管体系下的空中交通安全将面临重大挑战[2]。以感知规避(Sense and Avoid,SAA)技术为核心的无人机空域集成技术是未来空域安全的重要保障,作为政策规则与技术研究高度制约、相互融合的一项技术,SAA技术也是当前无人机技术研究的前沿领域和亟需解决的重要问题。
本文从政策、规则发展和主要技术研究领域等方面介绍了目前无人机感知与规避的研究现状;依据SAA的功能描述进行数学建模与分析,重点分析了环境感知技术和规避路径规划技术;基于上述基础提出了两种针对中小型无人机的感知与规避方法;最后,结合我国空域发展国情与无人机技术发展趋势,对我国无人机感知与规避技术的发展给出了几点建议。
2 无人机感知规避发展现状
对于无人机而言,并没有机组人员来履行威胁检测以及规避的职能,因此无人机系统只能单纯的依靠机载装备的一系列传感器来完成障碍规避[3]。无人机SAA技术是一项技术研究与政策规则发展相辅相成、协同发展的技术。一方面,无人机SAA技术发展具有鲜明的政策、标准导向性,即无人机的系统配置、通信、感知规避操作等要遵守相关的航空法规、设计参考、适航标准和操作准则[4];另一方面,SAA技术研究能够促进相关航空政策标准的改革,即新平台、新技术、高自主的空中交通形态,必然会带来空中交通管理手段、操作标准的革新和政策法规的变化。通过技术研究与政策标准的相互迭代发展,共同促进无人机空域集成应用和保障空域飞行安全。随着越来越多的无人机应用在国防军事和国民经济领域,无人机于无人机、无人机于有人机,都构成了直接威胁,如何避免无人机与其他飞机碰撞就成为非常值得关注的问题。虽然美军已经建立起防止无人机与有人机碰撞的机制,但还远没有达到安全的程度,还在致力于研究提高无人机飞行安全性的更可靠解决方案,而感知规避系统可以确保无人机具有与有人机同样的安全性[5-11]。目前我国无人机研究在自主避障系统上也有了较大进步,同时我国的无人机自主飞行研究也与国际潮流接轨,保障进一步的智能化和实时性,这也使得“感知与规避”技术成为了无人机的热门研究领域[12]。
2.1 无人机感知规避相关政策标准发展
当前阶段,无人机感知与规避的政策、规则、标准的发展是以现有的空中交通管理(Air Traffic Management,ATM)体系下的的政策、标准为参考,针对无人机的技术和操作特点,从而实现无人机在现有空域集成过程中的政策、标准保障和研究、应用指导。航空政策发展体系下的主要内容包括:无人机空域准入的法规政策、认证与技术标准、程序参考、测试标准与评估体系等。在当前无人机技术研究和产业不断发展壮大的情况下,空域飞行安全亟需相关的政策法规与技术标准来保障。包括美国、欧盟、澳大利亚、中国等不同的航空体系均不同程度的开展了相关政策和标准的建设。各国解决无人机空域安全方案主要分成陆基SAA和空中SAA两种。目前在研的感知与规避系统都是旨在为无人机系统及其操作人员提供飞机飞行安全保障技术[13]。
2.1.1 美国
美国作为当前无人机发展应用规模最大的国家,政策与技术体系经历了长期而复杂的发展历程,形成了目前基于豁免/授权许可(Certificate of Waiver or Authorization)的空域准入体系[14],在该体系下形成了无人机的空域准入、适航的政策规则,发展了无人机系统、通信、感知与规避的相关技术标准。在2007年颁布的FAA Notice 07-01[15]中,美国联邦航空局(Federal Aviation Administration,FAA)将民用无人机分为公共无人机、民用无人机和模型飞机三种,并沿用至今,有针对性的建立了相关的政策法规。
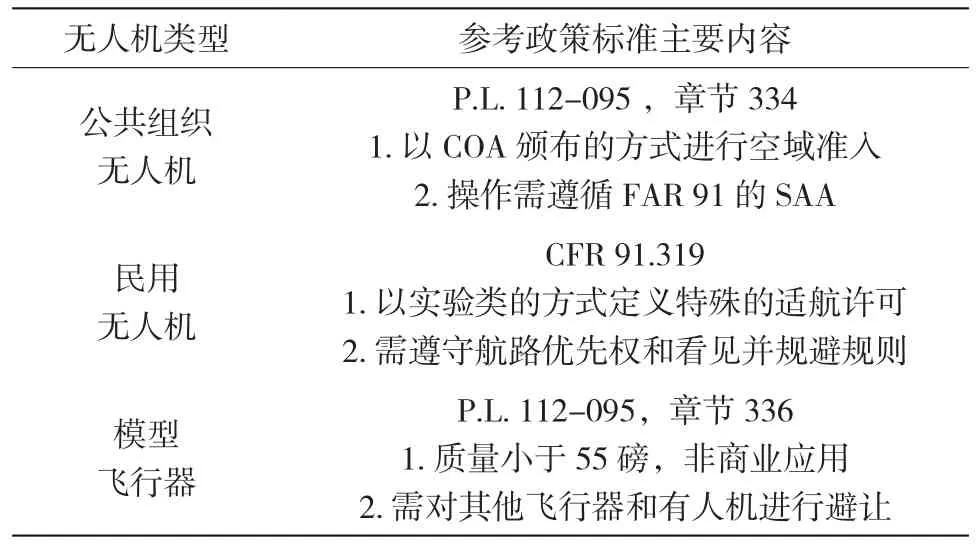
表1 美国无人机分类Table 1 The U.S. UAV’s classification
在无人机相关标准建设方面,航空无线电技术委员会(Radio Technical Commission for Aeronautics,RTCA)、美国汽车工程师学会(Society of Automotive Engineers,SAE)、美国材料与试验协会(American Society for Testing Materials,ASTM)等都建立了包括适航、飞行软件、通信、感知与规避、控制系统、操作培训等较为完善的无人机标准体系。RTCA在其飞行器最低性能标准(Minimum Aviation System Performance Standard,MASPS)中致力于建立无人机系统、指挥/控制/通信(C3)、感知与规避系统的相关标准。ASTM通过对比有人飞行器与无人机在适航性、飞行操作、人员训练与认证等方面的差异,形成了多个无人机相关标准,其中F2411-07[16]描述了无人机机载SAA系统的设计与性能评估标准。该标准通过对无人机SAA系统中的目标检测范围(水平±110o,垂直±15o)、安全分离距离(水平500英尺,垂直100英尺)进行定义,提供与有人飞行器等价安全的看见并规避能力。
目前,较为滞后的无人机准入政策已经逐步成为制约无人机发展的障碍,特别是在中小型民用无人机商业应用方面的不开放态度已经严重制约了无人机在民用领域的发展应用。针对该状况,美国加速了无人机相关政策、规则、标准的发展。2016年8月29日,美国联邦航空法规第107条“小型无人机规则”[17]开始实施,对小于55磅的小型无人机的操作限制、认证与职责、平台等进行了定义和要求。该规则的实施将进一步推动美国无人机的商业化应用,预计在2025年产生820亿美元的经济效益和10万个工作岗位[18]。
2.1.2 欧洲
由于欧洲的空域划分更加复杂,且不同的国家在空中交通管制、无人机应用等方面存在差别,因此欧洲的无人机操作与管理更加困难。针对该状况,欧洲航空安全局(European Aviation Safety Agency,EASA)在ANP-A 2015中提出了以任务操作为中心的基于风险的无人机分类方案和政策标准。其中无人机的风险定义为:与有人飞行器的空中碰撞、人身威胁、对重要设施和财产的损耗等。根据风险程度将无人机分为如下三类,并提出了相应的风险规避的政策和规则。
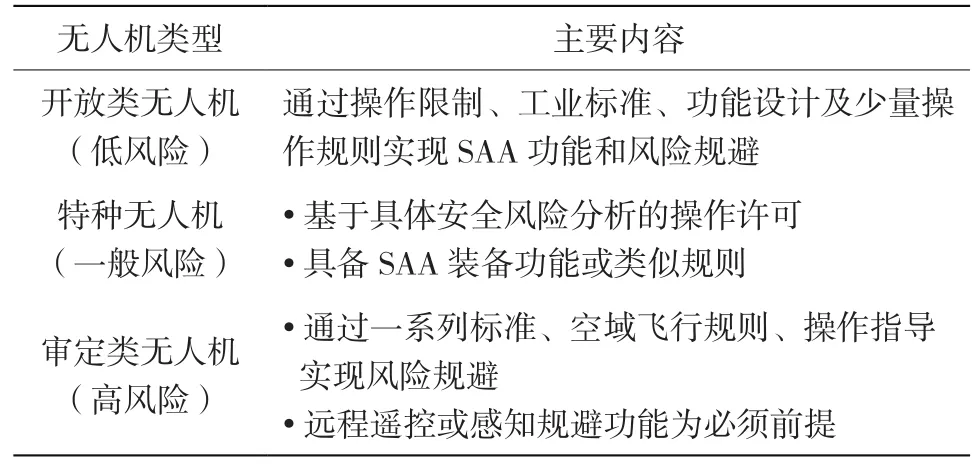
表2 欧洲无人机分类Table 2 European UAV’s classification
为支撑EASA的无人机相关政策,欧洲民用航空设备组织(European Organization for CivilAviation Equipment,EUROCAE)进行了一系列的标准建设[19],包括无人机操作与SAA、适航性、C3与通信、小型无人机等。从而满足现有空域飞行政策和规则下的无人机空域飞行安全保证,将风险降至最低。特别是针对感知与规避相关标准的建设,欧洲防御组织提出了空中防撞系统(Middle-Air Collision Avoid System,MIDCAS)[20]计划,将SAA系统设计指南和性能评估标准作为重要的研究内容。
在未来空中交通管理的建设过程中,欧盟充分考虑了无人机的发展。欧洲航空安全组织(Eurocontrol)提出的SESAR计划包含了无人机感知与规避、4D航路管理和先进通信链路等内容[21];另外,欧盟还提出了无人机综合创新计划(INOUI)[22],作为SESAR中无人机技术研究部分的有效补充,重点关注无人机在欧洲空域集成中的程序流程与标准要求等。
2.1.3 澳大利亚
澳大利亚被认为是最早进行民用无人机规则建设的国家,澳洲民航安全局(Civil Aviation Safety Authority,CASA)基于风险管理和操作许可进行无人机监管。在CASR 101部分,无人机系统根据操作性能分为三类,即大型无人机(最大起飞质量>150kg),小型无人机(最大起飞质量>25kg)和微型无人机(最大起飞质量>0.1kg),并根据AC-101建立相应的操作规则与标准,严格限制无人机的操作,防止对其他飞行器、人身安全、财产造成威胁。
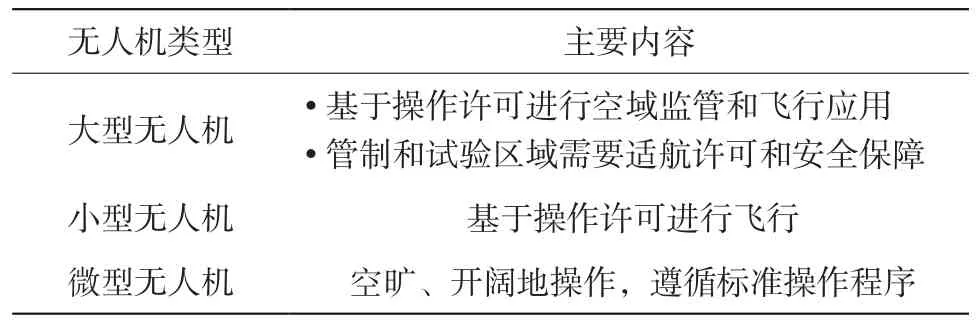
表3 澳大利亚无人机分类Table 3 Australian UAV’s classification
澳洲航空自动化研究中心(Australian Research Centre for Aerospace Automation,ARCAA)通过一系列的技术研究和标准制定为CASA的相关政策提供支持。在感知与规避研究方面,ARCAA通过一系列涵盖多个类别无人机感知与规避技术的仿真和实验,为无人机空域保障相关政策以及感知与规避系统设计标准政策提供有力的技术支持。
2.1.4 中国
近年来,我国无人机技术迅速发展,相关产业在军民领域的应用不断发展壮大;加之低空领域的不断开放和通用航空的蓬勃发展,为无人机的广泛应用提供了重要契机。但是,民用无人机空域集成应用的相关法规、政策方面的不足,仍然是制约无人机空域集成和安全应用的主要因素。近五年来,一系列政策法规的实施,加速了无人机空域安全应用的进程。其中,2015年9月下发的《轻小无人机运行规定(试行)》结合我国国情,对无人机进行了分类,并对无人机的操作要求和应用限制进行了定义,建立了基于操作员许可的无人机飞行管理制度;2016年7月下发的《民用无人机驾驶员管理规定》依据上述规定,对无人机系统的驾驶员实施指导性管理;《民用无人机空中交通管理办法》针对无人机的空域管理进行了规定,明确提出将无人机的感知规避能力作为无人机空域飞行安全能力的指标之一。
除了法规和标准建设以外,在“十二五”期间,军民领域的研究机构针对无人机空域集成中若干关键技术进行了研究,取得了一定的进展。感知与规避技术、通信-指挥-控制、无人机系统技术、无人机云监管等研究,为无人机的空中安全保障提供了技术基础。
2.2 无人机感知规避技术研究
无人机感知与规避技术是实现无人机空域应用的一项关键技术。在当前阶段,感知与规避技术是实现与有人机看见并规避功能等价安全,满足空中交通相关政策要求,实现空域准入飞行的必备前提;在未来无人机空域集成和多种飞行器空域共享过程中,感知与规避是保障空中交通分离、规避功能,实现空域飞行安全的核心技术。包括美国、欧洲、澳大利亚等多个国家的相关研究机构进行了大量的感知与规避技术研究,形成了包括多种技术手段的技术体系,如图1所示。SAA技术由近期到未来的发展,需充分考虑目前空中交通管理相关的技术状态,首先发展技术成熟、系统较为广泛发展的地基感知与规避(Ground Based SAA,GBSAA)技术,实现重点区域的飞行操作安全保障,再面向未来发展空基感知与规避(Airborne SAA,ABSAA)技术。在ABSAA技术中,综合利用合作式、非合作式的多种感知手段,实现全空域、全类型的无人机SAA[23]。当前合作式传感器技术和非合作式传感器技术都得到了很大的发展;协同式传感器在有人机上是强制安装的,以实现“探测与规避系统”的功能[24]。
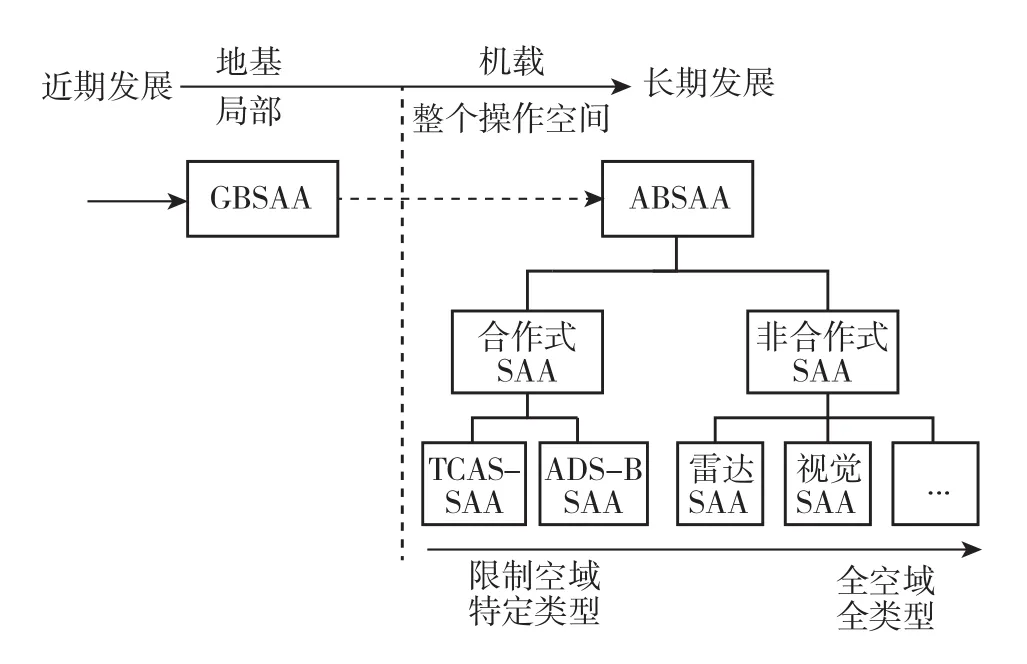
图1 无人机SAA技术发展Fig.1 UAV SAA technology developm ent
2.2.1 地基感知与规避技术
GBSAA是指利用地面的空中交通监管设备、技术等实现对无人机飞行空间的有效感知,并形成态势分析和碰撞风险规避[25]。由于当前的地基空管系统配置和技术发展较为成熟,GBSAA被认为是近期最有可能实现技术突破和应用的SAA技术,引起了广泛关注和研究,包括GBSAA系统构架、算法、系统测试等[25-27]。美国在2013年完成了GBSAA的相关技术开发,并进行了演示验证;2015年,GBSAA系统开始在美国空军基地进行列装应用[27]。
GBSAA的主要优点是基于现有的空管技术和系统实现SAA功能,技术成熟,性能稳定;主要缺点是受限于通信、雷达覆盖面积等影响,作用范围有限,且无法对低空小目标进行有效感知,无法形成全空域、全类型无人机的SAA功能。
2.2.2 空基感知与规避技术
ABSAA是基于机载的传感器、数据链路实现飞行空域的有效感知、威胁分析、路径规划与机动控制。由于ABSAA技术不依靠地面信息支持,能够独立自主完成感知与规避任务,被认为是未来长期发展的SAA技术,也是无人机自主化、智能化发展的必然趋势[28]。随着无人机相关材料、能源、动力系统,以及传感器技术、高性能数据处理技术、高速可靠通信技术的发展,基于多种合作式和非合作感知方式的机载SAA技术得到了研究和发展。
(1)合作式SAA技术
合作式SAA通过应答机制、数据链路实现空中交通的有效监管和分离、规避功能。合作式SAA能够实现空管数据的有效接入和空管系统的可靠监管,是未来无人机空域集成的必要手段。目前主要的合作式SAA技术包括T-CAS SAA技术和ADS-B SAA技术。
T-CAS系统是一种在有人机上得到广泛应用的成熟技术[29],作为民用飞行器的主要防撞技术手段,经历了长期的飞行验证,技术较为成熟稳定。MIT实验室长期研究基于T-CAS技术的无人机感知与规避,2006年基于RQ-4的感知与规避能力需求,对遭遇模型、碰撞风险、飞行特性、故障诊断进行了原理分析和验证,实现了基于T-CAS II的SAA测试。ADS-B是美国NextGen计划中的一项变革性技术,依靠卫星定位,具有精度、体积、功耗优势,能够独立于地面、空中交通信息完成空情感知。2012年以来,包括NASA、美国空军、MITRE等多个研究机构和组织着手ADS-B SAA的研究,并完成了感知与规避的相关测试。2013年4月,R3公司完成了基于ADS-B的感知与规避系统的演示验证,通过虎鲨无人机搭载该系统,成功实现全自主的碰撞规避功能。ADS-B系统作为下一代监视技术在民航领域得到了极大关注[30]。
合作式感知方式的前提是本机与空域其他飞行器能够建立基于应答机制或广播的合作式信息交互通道,难以保证在真实飞行环境中非合作目标存在情况下的感知与规避,因此,单一的合作式感知与规避技术难以真正保证无人机的空域飞行安全。
(2)非合作式SAA技术
非合作SAA通过机载各类传感器实现无人机对各类飞行空间目标的有效感知,包括目标检测、跟踪、威胁估计,并根据感知信息实现对目标的有效规避。非合作SAA技术能够不依靠地面信息和通信链路支持,实现独立自主的空域感知与规避,是未来全空域、全类型无人机感知规避技术的重要环节。适用于非合作SAA的主要探测手段包括光学、红外、雷达、激光雷达等。
雷达是大中型军用无人机的主要传感器,具有探测距离远、全天候感知的优势,适用于对各类空中目标的有效感知。基于雷达的感知与规避技术近年来得到了广泛的研究。MIT的林肯实验室设计了一种基于Step-Notch的Ku波段感知与规避雷达,通过3个天线阵列实现220o×30o的空域感知范围覆盖;美国海军计划在两架RQ-4无人机上对该雷达进行安装应用与功能测试。针对中小型无人机载荷能力有限的特点,Denver大学设计了一种体积小、质量轻、功耗低的雷达系统,可应用于中小型无人机的感知与规避任务。然而,在针对低空、小型、慢速运动目标和近地应用场景中,雷达系统具有其感知局限性。
光学传感器是无人机系统的必备传感器,能够完成包括对空、对地观测、辅助操作与导航等任务。光学传感器具有体积小、质量轻、低成本、低功耗等特点,能够实现高质量的飞行空间数据获取,特别适用于中小型无人机的感知与规避任务。近年来,针对视觉SAA中的目标感知、规避控制、系统设计与评估等内容引起了广泛关注。DRA在NASA的支持下,设计了一种基于视觉的SAA系统,用于实时检测、跟踪算法验证以及遭遇场景的数据收集等。ARCAA在视觉目标检测、规避控制、系统设计等方面都取得了很大进展。光学传感器应用于感知与规避系统中的主要障碍包括:图像数据处理计算量较大,在机载计算机等计算能力有限的场合实时应用有一定困难;视觉传感器不能直接获取目标的深度信息,基于视觉的深度估计往往会带来复杂机动的额外代价。
除此之外,针对无人机的特定应用环境和飞行器属性,激光雷达、声呐、立体视觉、超宽带技术等传感器被应用于感知与规避任务中,并有针对性的进行了相关的算法开发和系统设计。
(3)基于多源信息融合的SAA技术
考虑到单一信源感知方案在应用场景、作用范围、检测精度等方面的局限性,无法在未来空域集成的复杂场景中实现稳定可靠的感知与规避。感知与规避系统设计应综合多种探测手段,基于信息融合框架,利用合作式、非合作式多通道信息,实现高可靠性的空域感知能力,保障无人机的空域飞行安全。
GA-ASI在2013年完成了一项基于多源信息融合的感知与规避系统,利用ADS-B、T-CAS、Due-Regard雷达信息进行融合碰撞预估和显示,系统测试证明了其多源信息融合SAA系统在威胁检测、系统可靠性方面的优势。Fasano G在文献[31]中设计描述了一种融合光学、雷达传感器的全自主无人机防撞系统,并对信息融合目标检测、多信源综合决策、机动控制等进行了说明,仿真和实验证实了算法和系统的有效性。多源信息融合SAA系统结构、数据处理、传输复杂,存在着包括软、硬件等多种应用障碍需要解决。
3 无人机感知规避概念与建模
3.1 无人机感知规避概念
在当前阶段,感知规避是无人机系统与有人机系统的看见并规避功能对等的技术功能。1968年,美国FAA在FAR 91.113 中提出:“…在气象条件允许的情况下,无论在视距飞行规则下或者仪表飞行规则下,飞行操作人员需保持警觉,实现看见并规避其他飞行器的功能…”。FAA认为无人机空域飞行的前提是能够实现与有人驾驶飞行器等价的飞行安全(Equivalent Level of Safety, ELOS)的能力,即感知与规避功能,其功能实现包括空中交通自动分离和碰撞规避,包括FAA、DoD、EUROCAE等对SAA的定义均体现了上述特点。
感知与规避的功能实现是一系列相互关联的算法、功能执行的结果,包括目标检测、跟踪、威胁评估(威胁判定、威胁排序与分级)、规避决策与路径规划、规避机动等过程。
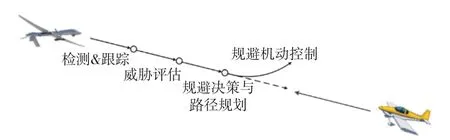
图2 无人机感知规避过程示意图Fig.2 Schematic diagram of UAV SAA
●检测:实现空间环境感知的第一步,是对空间环境进行障碍检测,获取空中可能存在碰撞威胁的动态或静态目标。
●跟踪:通过有效的估计、跟踪算法实现飞行空间目标的飞行状态估计,包括位置、速度等。
●威胁评估:根据目标的运动状态和空间分离规则对碰撞进行威胁程度的计算;存在多个碰撞威胁目标时,对目标进行基于威胁程度的等级划分和先后排序。
●规避决策与路径规划:根据威胁评估结果判定给出飞行管理决策,根据计算得到的最小分离点(Closest Point of Approach,CPA)、碰撞时间(Time To Collision,TTC)等计算规避路径。
●规避机动:通过机动输出执行规避决策和规避路径跟踪。
3.2 无人机感知与规避建模
感知与规避的系统模型如图3所示,以目标的属性(如合作/非合作)、飞行状态(位置、速度、飞行航路、机动动作)为输入,以有效的规避机动指标(如规避分离距离、碰撞预留时间、规避机动等)为系统输出。
在信息感知模块,本机j通过具体的空域感知设备配置对目标的状态进行有效感知,获得本机j对目标i的感知数据yi,j作为模块的输出。在该模块中,气象、电磁等环境干扰θ往往会增加传感器数据噪声,降低感知质量。在安全评估与优化控制模块中,以空域感知数据yi,j、本机j的导航数据为输入,完成感知与规避功能,以运动控制量为输出至无人机的控制器,执行规避机动。在无人机空域集成状态下,无人机的威胁估计与机动控制要充分考虑空中交通管理的相关规定与数据链路数据ϑ。
安全评估与优化控制是无人机感知与规避的核心算法功能,该环节决定了无人机感知与规避功能的实现质量,该模块的机动输出由以下几个指标共同决定:
●安全性:SAA的最主要目的是保证无人机的空域安全,即以安全性作为SAA系统和算法设计的最高指标。
●高效性:高效性是智能系统的重要特性。无人机感知与规避技术中,目标的信息感知和具体路径规划和机动控制均需体现这一特点。
●精确性:精确性是系统功能实现的重要保证。在无人机感知与规避功能中,体现为对目标的精确检测和状态描述。
基于上述指标,通过对无人机感知与规避功能优化的能量函数Jj进行优化,求解规避机动控制:
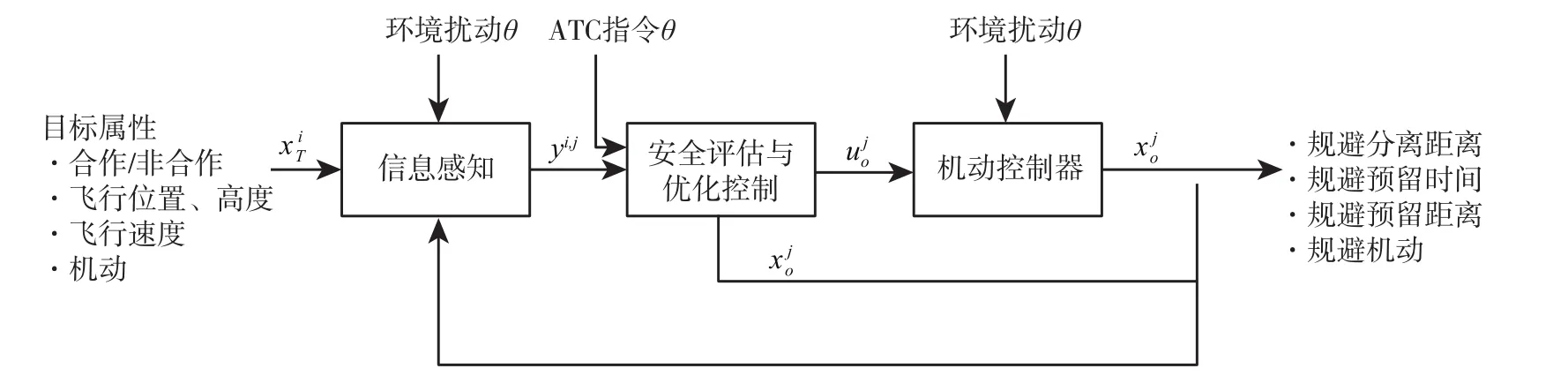
图3 无人机感知与规避系统模型Fig.3 UAV SAA system model
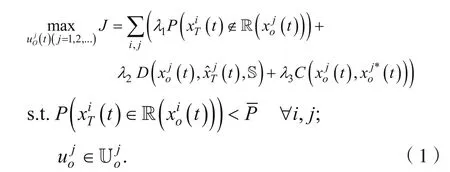
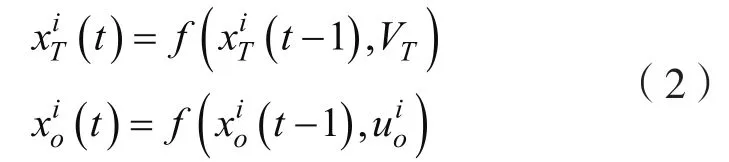
公式(1)中的 ()D⋅为目标的感知性能指标函数,在给定的目标和本机的运动方程:
和一定传感器配置S下的量测方程:

可得目标的感知功能函数如下:

其中VT为对目标机运动模型的先验假设为优化权重参数,为目标状态估计误差。感知优化的目标是在一定的时间窗h内,根据本机状态、感知数据、本机运动控制,实现对目标的估计误差最小的过程。公式(4)中,D(⋅)越大代表目标估计误差越小。
P(⋅)为目标威胁程度函数,通过计算在一定的时间窗内本机安全包络内存在目标的概率:

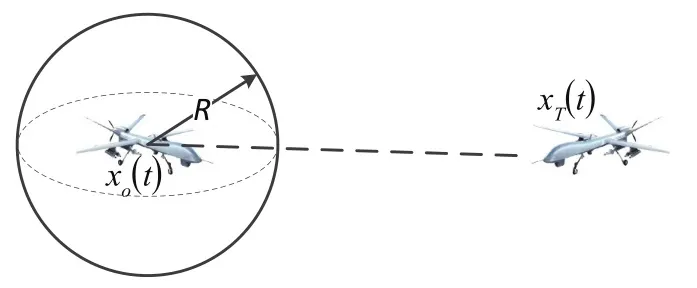
图4 球形安全包络示意图Fig.4 Spherical envelope diagram
C(⋅)为本机任务效率函数,在给定任务属性中,反应为当前的飞行器状态对预设的任务状态的跟踪情况:
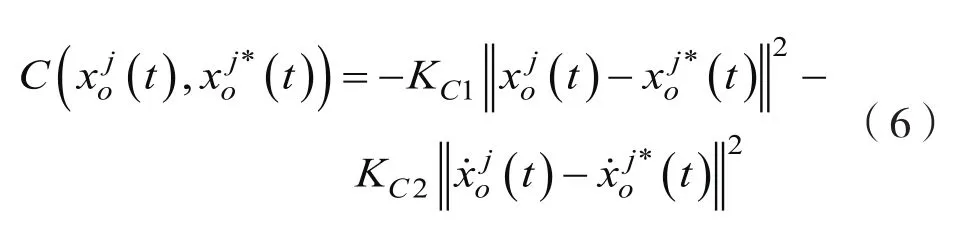
KC1>0和KC2> 0 为权重参数,C(⋅)越大,代表本机运动执行效率越高,反之则机动消耗较大,任务执行较差,如图5。
在感知与规避过程中,当目标出现在视场中时,通过感知函数D实现最优的目标估计,特别是在存在部分量测信息缺失的场景下,通过本机的优化机动与联合估计,能够实现对目标状态的有效估计;对P函数的优化机动输出能够保障在一定概率意义下本机与目标机的碰撞概率小于给定的概率;而C的功能,即保证通过最小的机动和感知代价实现上述功能。
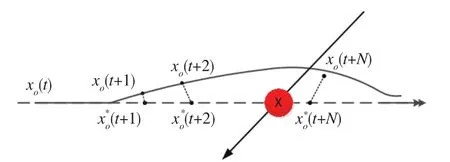
图5 本机航路跟踪示意图Fig.5 Local route tracking diagram
4 无人机感知规避关键技术
4.1 无人机空域感知技术
实现有效的空域感知是进行障碍规避的必要前提。充分考虑传感器属性、平台属性和飞行空域的相关规则,有针对性的进行无人机传感器配置,能够实现高效、高质量的信息获取,大大提高感知与规避效率。
首先,对无人机空域感知传感器配置应充分考虑各传感器的作用方式、应用范围和功能参数,能够针对不同应用场景的感知规避要求进行有效的空域感知数据获取;进一步,在进行机载感知与规避系统设计时还应考虑无人机平台的空间操作特性(如飞行空域、飞行速度、机动等)、载荷能力、任务功能等约束,能够实现传感器在机载平台的有效加装;另外,无人机的感知配置应满足相关空域飞行的配置要求和准入条件,如飞行规则(目视飞行规则、仪表飞行规则等)、通信链路(应答机、空管监控系统等)。
空域目标感知算法是在有效的传感器配置情况下,通过对感知数据处理实现目标检测、定位与跟踪的过程。无人机飞行空间不同,面临的感知目标也不同,高空无人机要实现对远距离、高速运动目标的精确状态估计;低空无人机环境复杂,感知目标不仅包括空中运动目标,也包括地形、建筑物等静止目标。在特定的感知配置下,可靠的目标检测和精确的目标状态估计是后续威胁估计和路径规划的主要依据。
4.2 无人机规避路径规划技术
无人机规避路径规划功能是在本机机动包络范围内,通过优化规避航线和控制输出,实现最大化安全函数P(⋅)和最小化消耗函数C(⋅)。目前针对SAA的路径规划可分为两种,即全局路径规划算法和局部规避算法,分别对应路径分离和碰撞规避两种功能。
4.2.1 全局路径规划算法
全局路径规划算法能够实现全局意义下的碰撞规避路径求解,从而以较轻微的机动完成SAA功能,具有更小的机动代价和碰撞风险。但全局规避路径规划算法的实现依赖于对无人机飞行空间的障碍物状态信息完全、精确已知,且计算量相对较大,实时性差。在基于合作式ADS-B信息或基于GIS信息的碰撞规避中,空中目标航线或地面地形、建筑物等信息完全已知的情况下,可基于全局路径规划实现碰撞规避。常见的全局路径规划算法包括状态空间搜索算法和启发式算法,状态空间搜索算法通过将包含本机和碰撞目标信息的状态空间进行离散化,建立目标函数进行最优路径搜索,实现全局最优,但是计算量大。启发式算法是基于启发式优化算法,建立规避碰撞优化函数,寻找最优规避路径,包括遗传进化算法(GA)、蚁群算法(ACO)、粒子群优化(PSO)等。
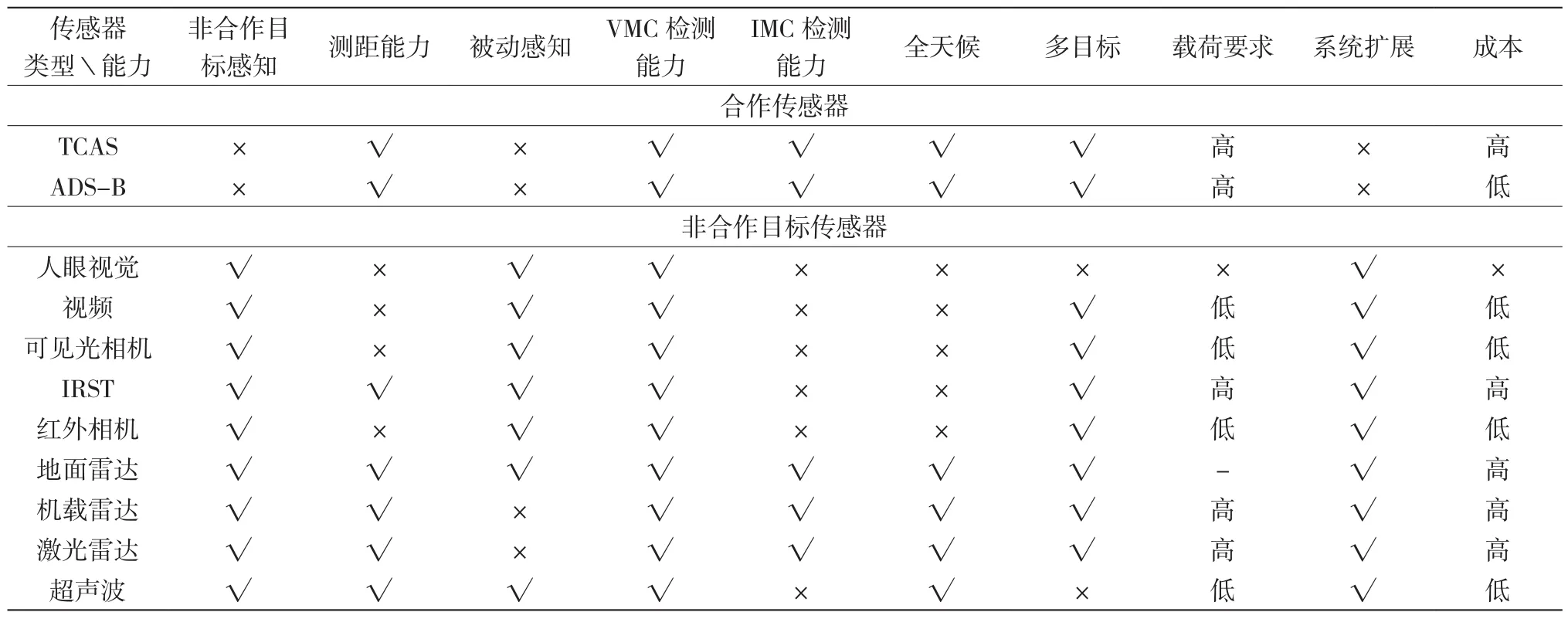
表4 空域感知传感器作用方式、应用范围和功能参数Table 4 Airspace sensing sensor mode of action,application range and function parameters
4.2.2 局部路径规划算法
反应式路径规划算法是在飞行空间环境信息局部已知、目标感知精度有限的情况下,依据当前系统状态和感知数据,对下一步的规避路径和控制输出进行求解,实现局部路径规划。在针对非合作目标的感知过程中,目标的感知信息往往是不精确、不完备的,需通过反应式规避算法,进行应急机动控制输出,实现对非合作目标的有效规避。
在感知与规避过程中,空域目标环境复杂,包含静止、运动,合作式、非合作式等多种目标,在进行规避路径规划算法设计时,应充分考虑目标特性,充分利用全局、局部感知信息,实现规避效能的最大化。
5 总结与展望
无人机感知与规避技术是复杂和系统的工程,涉及到政策标准、规则制定、飞行控制、航路规划、传感器技术等多个层面。为保证不同类型的无人机能够在空域有条不紊的执行任务,感知与规避技术是未来无人机空域飞行和应用的一项核心保障技术,其研究应与现有的空域体系协同发展,互相促进。
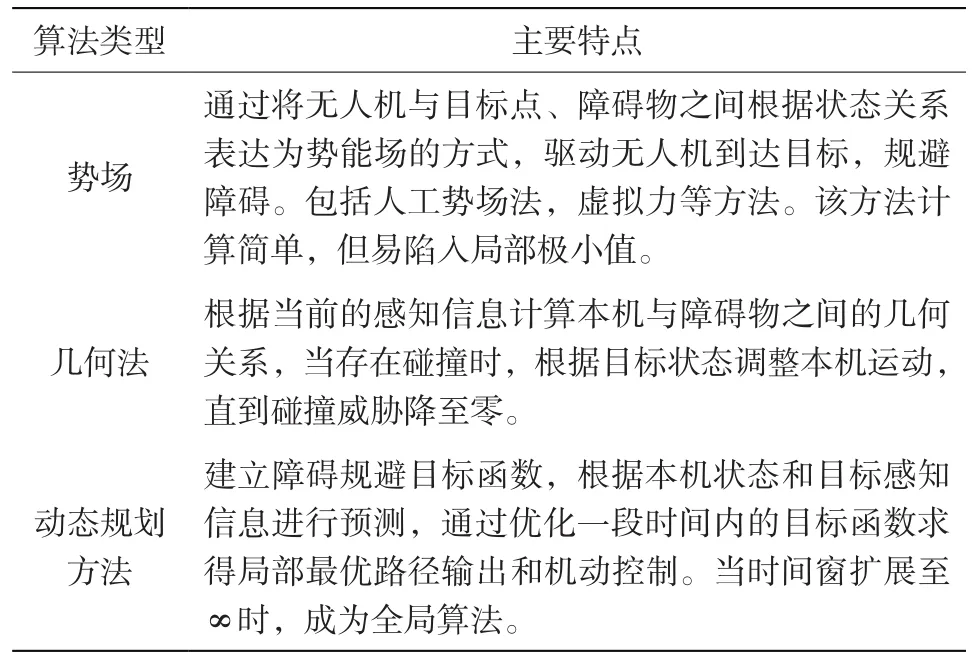
表5 常见的局部路径规划算法Table 5 Common local path planning algorithm
(1)尽快完善无人机相关的航空法规和相关政策,为SAA技术的研究提供导向性参考;对无人机飞行空域进行合理的空域定义及分配、完善空域飞行规则与制度,保证同一类型的无人机都能够遵守同一的规则飞行;在民用领域建立无人机的空域管理办法以及空管流程,并对无人机操作手进行规范性的培训及考核。
(2)以相关法规、政策为主要功能和技术指标,进行SAA系统设计和算法研究,并完成系统测试;设计并制定无人机感知与规避风险评估系统,对无人机的SAA系统进行规范的性能评估。
(3)根据SAA相关的测试结果和技术分析,完成SAA系统和技术的相关标准和指导性文件,制定无人机空域通行规则。
同时,无人机作为一类自主移动机器人, 感知与规避能力也是无人机自主化、智能化的一个必要能力,随着应用的进一步扩展,空域的“拥挤”成为亟待解决的问题。与此同时,无人机碰撞事故对人民生活及财产安全造成巨大威胁。提高无人机感知与规避能力是确保无人机自主安全航行的必要条件,更是无人机向智能化迈进的保障和基础。
