基于FlightGear的航磁数据仿真平台
2019-01-11窦振家孙宇慧
窦振家, 孙宇慧, 胡 凯, 韩 琦
(哈尔滨工业大学 计算机科学与技术学院, 哈尔滨 150001)
0 引 言
航空磁探是指利用搭载于飞机平台上的磁力仪对地磁场进行测量,并期望从磁力仪输出信号中检测出感兴趣的目标磁场信号,在磁法勘探、磁力反潜、地质研究等领域有着极高应用价值。然而,机载磁力仪输出信号中不仅包括地磁场和感兴趣的目标磁场信号,还包括飞机自身产生的磁干扰。并且,飞机产生的磁干扰通常与感兴趣的目标磁场信号形成频带重叠,无法直接采用传统滤波方法对其予以去除,因此通常需要所谓的航磁干扰补偿技术[1]。另外,为了从磁力仪输出信号中提取感兴趣的目标磁场信号,通常需要相应的航磁异常检测算法[2]。不难看出,航磁干扰补偿算法和航磁异常检测算法是实现航磁探测设计应用目标的前提。
为了研究航磁干扰补偿算法和航磁异常检测算法,显然需要高质量的航磁探测数据。然而,实际中获取航磁探测数据的经济成本较高,并且由于受到磁力仪安装、机载电磁环境等航磁探测系统外部因素的影响,采集到的航磁数据质量参差不齐[3],直接利用这些数据对航磁干扰补偿和航磁异常检测算法进行验证可能会得出错误结论。再者,在算法研究与改进过程中,必须充分掌握测试方法的前提假设以及测试数据的特征属性,因此通常需要暂时屏蔽或排除其它无关因素所带来的干扰。众所周知,利用计算机进行数字仿真便能够做到对各种实验条件和环境要素的控制与调整,即可以利用计算机仿真生成机载磁力仪的输出数据。
另一方面,机载磁力仪输出信号中飞机产生的磁干扰和地磁场均与飞机飞行过程中的姿态、位置信息高度相关,因此,为了仿真机载磁力仪的输出数据必须事先得到可靠、可信的飞机飞行姿态和位置数据,而这可以通过模拟飞行软件来完成。鉴于开源模拟飞行软件FlightGear[4]已经在航空工业界和学术界得到充分认可和广泛引用,本文设计并实现了一种基于FlightGear的航磁数据仿真平台。
1 数字仿真平台的总体设计
航磁数据仿真平台的总体架构如图 1所示,主要由2部分构成:上层是飞行仿真子系统,下层是干扰磁场仿真子系统。其中,飞行仿真子系统用于生成飞机飞行过程中的姿态和位置数据,这些数据将用于干扰磁场仿真子系统计算飞机平台产生的磁干扰和地磁场。干扰磁场仿真子系统输出的磁场数据包括标量形式和矢量形式2种,这2种磁场数据最终将用于测试验证航磁干扰补偿算法和航磁异常检测算法。
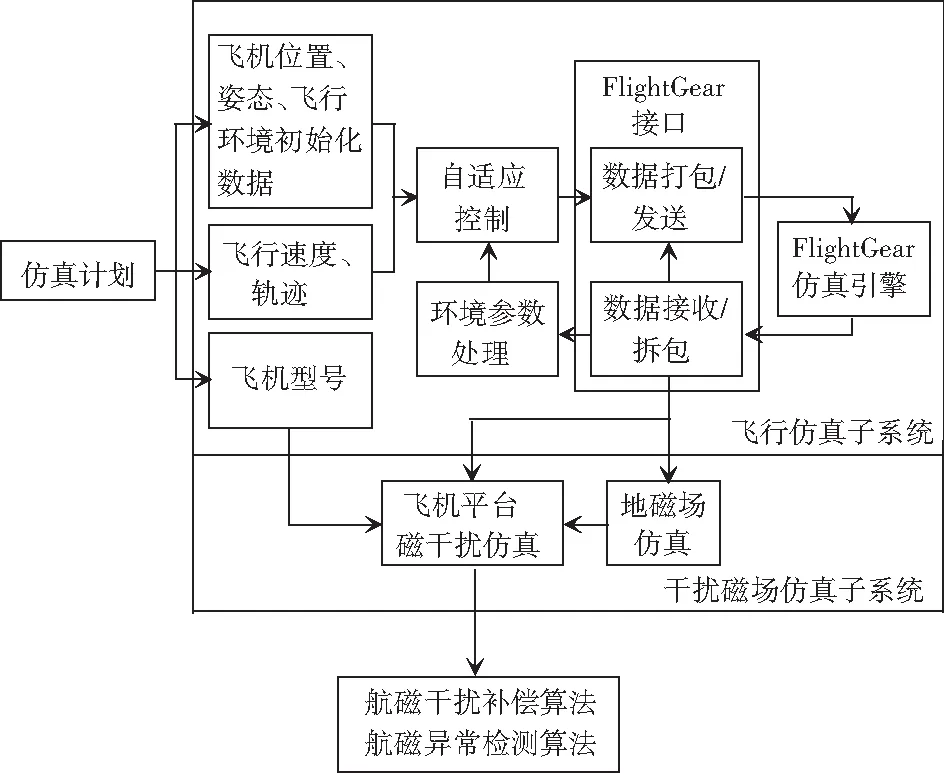
图1 航磁数据仿真平台的总体架构
Fig.1Thearchitectureoftheaeromagneticdatasimulationplatform
2 飞行仿真子系统的设计与实现
飞行仿真子系统的核心模块是开源模拟飞行软件FlightGear。Flightgear是航空工业界和学术界应用最为广泛的飞行动力学引擎,主要包括动力学系统、飞行器模块、时间系统、视景系统、音效系统、控制系统、坐标系系统、平显分系统、日志分系统等。
在航磁数据仿真平台中利用FlightGear生成的飞机姿态位置数据具体包括飞机飞行期间的航向角、俯仰角、横滚角、经度、纬度和海拔高度。为此,如图 1所示,需要制定仿真计划,包括设置飞机初始位置、初始姿态、飞行环境、飞行速度、飞行轨迹及飞机型号等。
当前时刻的飞行姿态位置等状态信息首先将被输入到自适应控制模块中,并根据环境参数处理模块输出的环境参数对其辅以自适应调整,随后将被发送到FlightGear输入/输出接口中进行打包,而打包后的数据则被发送到FlightGear仿真引擎中。该引擎将根据当前时刻的飞行状态数据计算下一时刻飞机的飞行状态,并将其返回到FlightGear输入/输出模块,该模块将负责对飞机的飞行状态数据进行拆包,同时将全部状态数据转发到环境参数处理模块中,而将其中的飞机姿态位置数据转发到干扰磁场仿真子系统中。
这里环境参数处理模块的作用是根据当前飞机飞行状态数据更新飞行环境参数,如风速、气压等,再将相应结果输入到自适应控制模块中。
3 干扰磁场仿真子系统的设计与实现
干扰磁场仿真子系统主要包括地磁场仿真子系统和飞机平台磁干扰仿真子系统,其中飞机平台磁干扰仿真子系统需要的输入数据除飞机姿态位置及飞机型号外,还需要地磁场数据,因此本节首先将探讨地磁场的仿真方法。
3.1 地磁场仿真
地球及靠近地面的空间中存在的磁场统称地磁场,而地磁场强度、地磁倾角和地磁偏角统称为“地磁三要素”[5]。为了仿真飞机产生的磁干扰,必须事先知道地磁三要素,为此航磁数据仿真平台采用了WMM2015模型。
世界地磁场模型(World Magnetic Model,WMM)是受北大西洋公约组织等军事机构所托,由美国国家海洋与大气管理局国家地球物理数据中心和英国地质勘查局共同研制的12阶球谐模型。该模型报告每五年由美英联合发布一次,对旧模型系数和其它指标等相关要素进行更新和说明,是当前地磁研究领域最为权威的地磁模型。WMM2015是迄至目前的最新模型,有效期为2015年1月1日到2020年1月1日。航磁数据仿真平台利用WMM2015模型生成飞机飞行过程中的地磁场数据,只要输入时间、经度、纬度和高度信息便能利用该模型计算出相应的地磁三要素。
3.2 飞机平台磁干扰仿真
根据文献[1]可知,飞机平台产生的磁干扰分为恒定磁场、感应磁场和涡流磁场3种类型,只要分别对这3种类型干扰磁场进行仿真,最后将所得结果相加便能得到飞机产生的磁干扰。研究内容可分述如下。
3.2.1 恒定磁场的仿真
恒定磁场主要由飞机上的硬磁物质产生且不随飞机的机动变化而变化。为了模拟恒定场的产生,可使用磁偶极子阵列模型,即将飞机上所有硬铁材料细分成磁偶极子的有序阵列。

(1)
其三分量形式表示为:
(2)
因此恒定磁场在磁力仪探头处的磁场强度为:
(3)
3.2.2 感应磁场的仿真
感应场由飞机的软铁材料构成,随地磁场的变化而变化,与地磁场的方向一致。
为了模拟感应场生成,将其抽象成在飞机上一根根忽略横截面积的软铁杆,飞机的感应场由软铁杆产生。每一根软铁杆在该点处产生的场强大小由公式(4)计算得到,即:
(4)


3.2.3 涡流磁场的仿真
在飞机蒙皮、骨架处会等效成一个个线圈,而地磁场会缓慢变化,就造成通过蒙皮和骨架处的磁通量发生变化,从而产生涡流电流,并且该电流会不断变化,由此形成涡流磁场。涡流场产生机理释义则如图 2所示。
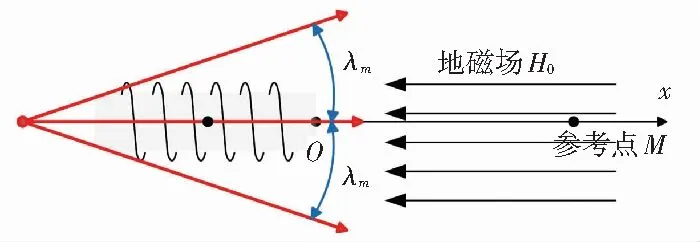
图2 涡流磁场产生机理
通过线圈内部的磁通量φ(Wb)可用式(5)计算得到:
φ=πr2μμ0H0
(5)
其中,μ为空气的磁导率,且μ≈1;μ0为真空磁导率,且μ0=4π×10-7H/m;H0为地磁场强度。
由于线圈匝与匝之间是互相串联的,整个线圈的总电动势是各匝所产生的电动势之和,即:
(6)
因此,t时刻所产生的感应电流为:
(7)
其中,I(t)代表全电流,即位移电流与传导电流之和。则单位长度内的电流为:
(8)
也就是,在长度dl内共有电流ιdl。这时的电动势均为感生电动势,产生的电流为涡旋电流,电流可近似看作是连续地沿环向分布的。取线圈轴线为X轴,取其离参考点M较近的一端O为原点,M点与O点的距离为x,则在M点处产生的磁感应场强度都是沿着轴线方向的,数值大小为:
(9)
利用式(9)便可以计算出沿笛卡尔坐标系3个轴向上的涡流磁场强度。
对仿真得出的恒定磁场、感应磁场以及涡流磁场进行矢量叠加便可以得到飞机平台产生的磁干扰,而将其进一步与仿真出的地磁场叠加就可以得到仿真的机载磁力仪输出数据。
4 测试结果与分析
利用该新型航磁数字仿真平台所生成的总场数据以及磁场三分量数据依次如图 3和图 4所示。从图中可以看出,总场波形和磁场三分量信号波形与实际航磁探测数据的波形十分接近。
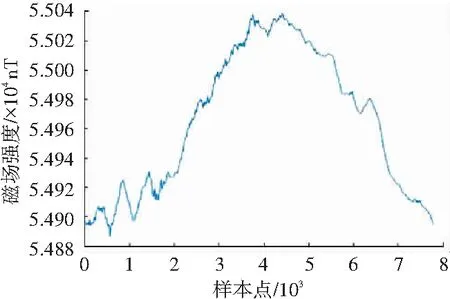
图3 仿真生成的总场数据
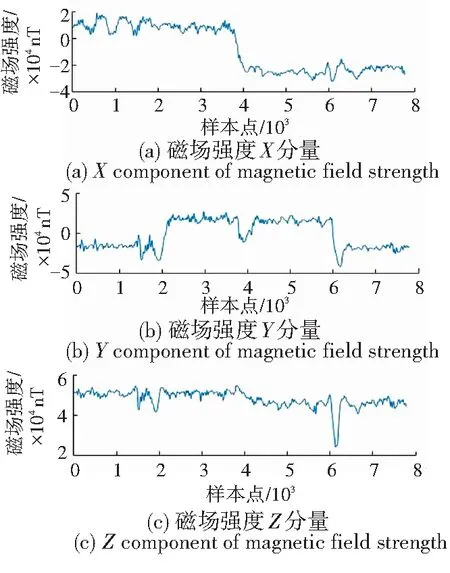
图4 仿真生成的磁场三分量信号
5 结束语
本文设计并实现的航磁数字仿真平台对于航磁干扰补偿与航磁异常信号检测算法的研究具有十分重要的价值和意义,该平台首先降低了航磁数据的获取成本,其次该数字仿真平台具有极高的灵活性,通过调整和控制某些因素有助于对航磁干扰补偿和航磁异常算法的深入理解与研究改进。
