深空探测推进技术发展趋势
2019-01-10李永丁凤林周成
李永,丁凤林,周成
(北京控制工程研究所,北京 100094)
0 引 言
深空探测是航天器重要的应用领域,推进技术是制约航天器深空探测能力的重要因素。深空探测任务牵引了多种推进技术的发展,推进技术的进步也为深空探测任务的拓展提供了更多选择。
由于深空探测在对象选择、探测方式等方面都存在多样性,使其对推进系统的要求也呈现出多样化。从探测对象来看,在太阳系以内,探测范围包括各类行星、卫星、彗星等所有物质和现象,在太阳系以外,更是存在广袤的宇宙空间。从探测方式来看,常见的方式包括环绕巡查、穿越探测、制动着陆、采样返回等,不同的探测方式对航天器的需求以及对推进系统的需求有很大差异。
尽管深空探测任务存在多样性,但对这些任务进行总结,可以提炼出该类任务对航天器推进系统的共性需求。
首先,要求推进系统具有较高的比冲。深空探测任务需要摆脱各类星体的引力,这就要求探测器具备较高的速度增量,而这个速度增量获得的渠道有两个:一是由行星间的借力飞行提供,另一个是由航天器自带的推进系统提供。前者需要满足诸多约束条件,且往往以更多的时间花费为代价;后者则要求推进系统具备较高的总冲,在发射重量受限、推进剂携带量受制约的情况下,总冲的提高只能依靠较高的比冲来实现。
其次,要求推进系统能够提供合适的推力。对于需要快速轨道调整、快速制动、在探测对象上受控着陆、或者需要进行采样后起飞返回等类型的任务,均需要航天器能够提供足够大的推力,来满足上述探测任务需求,具体所需的推力大小,根据任务特点和引力情况来确定。
再次,要求推进系统对能源具有一定的适应能力。很多深空探测任务在整个探测周期中,航天器与太阳的距离会发生较大变化,对于依靠外界能源的推进系统,尤其是太阳能电推进系统,必须要具备适应能源变化的能力,使发动机能够在不同的功率范围内都能够正常工作。
为了满足上述需求,深空探测类航天器推进系统往往是由多种类型组合而成的,在不同的工作阶段,采用不同的推进技术,使其能够发挥最大的优势。下面对几种典型的深空探测航天器推进系统的应用情况和研究进展进行介绍。
1 混合模式推进系统在深空探测的应用
混合模式推进系统是指由不同的推进形式组合而成的推进系统,它是深空探测任务中应用最为广泛的推进类型。混合模式推进系统通常由双组元化学推进、单组元化学推进、电推进中的两种或三种组合而成,它能够在不同的任务阶段,采用不同类型的推进系统工作,充分发挥各类系统的优势。
1.1 单双元混合推进系统
单双元混合推进系统是深空探测领域里应用较为广泛的推进类型,它能够利用单组元可靠性高,双组元推力大、比冲相对较高的优势,在探测器不同工作阶段分别发挥作用。
“卡西尼号”(Cassini)是由美国国家航空航天局(NASA)、欧洲空间局(ESA)和意大利空间局(ASI)联合研制的木星探测器[1],于1997年10月发射升空,2004年7月进入木星轨道。该探测器旨在对木星及其光环、卫星和磁场进行探测。该探测器发射重量为5.712 t,携带化学推进剂2.978 t,采用了两套独立的推进系统,一套是双组元轨控推进系统,推进剂为甲基肼(MMH)和四氧化二氮(NTO),包括两台445 N推力器(1主1备);另一套是单组元姿控推进系统,推进剂为无水肼(N2H4),包括8台1 N推力器(4主4备),图1所示为该系统的结构图。

图1 “卡西尼号”探测器推进系统Fig.1 Propulsion system of Cassini
采用该类型推进系统与此次探测任务的特点密切相关。在任务前期,按照轨道策略,采用行星借力的方式脱离地球引力,探测器在轨飞行约7年后到达木星,通过快速减速制动方式进入环木星轨道。按照这种飞行策略,前期仅需采用单组元推进系统进行姿态调整和轨道修正;到达木星后,再采用双组元系统,通过主发动机点火实现快速制动工作。若采用纯双组元系统,需要在系统接通7年后才使用轨控发动机点火制动,与传统的双组元系统入轨后即接通并马上进行轨控发动机点火的模式有很大变化,可能会给航天器带来额外的风险。而前期采用落压式单组元系统工作,后期在需要时才接通双组元系统的工作模式会稳妥得多。既充分发挥了单组元高可靠,双组元推力大、性能较高的优势,又降低了双组元系统接通后长期待机再启动的风险。
“朱诺号”(Juno)是由美国洛马公司研制的木星探测器,于2011年8月5日发射。该探测器在木星上空5 000 km轨道运行,探测木星是否存在水和固体内核,并研究其内部构造、大气、极光和磁场。该探测器发射重量为3.65 t,所采用的推进系统是典型的由双组元和单组元组成的混合推进系统,该系统的供给部分是一体的,整套系统配备两台635 N的双组元发动机和12台12 N的单组元发动机[2]。探测器在轨飞行5年后,到达木星,通过减速制动进入环木星轨道,约有80%的推进剂在制动阶段消耗。该混合模式推进系统充分继承了洛马公司的优秀传统,推进剂采用NTO和N2H4,能够兼顾双组元和单组元的需求,且作为双组元使用时,轨控发动机性能优于采用NTO和MMH体系的发动机性能。该系统同样是在前期采用单组元系统进行姿态调整和轨道修正,到达木星轨道后,再采用双组元系统进行减速制动,图2所示为“朱诺号”探测器示意图。

图2 “朱诺号”探测器示意图Fig.2 View of Juno mission
1.2 电化混合推进系统
在深空探测航天器中,对电推进和化学推进组合的混合推进系统的应用非常广泛,电推进以其高比冲的优势,在重量受限的情况下,能够提供较高的总冲,而化学推进可以通过多个推力器的合理组合实现姿态控制,并利用其推力大的优势实现快速轨道捕获、制动、着陆和起飞。
“智慧1号”(Smart-1)是ESA地平线2000科学计划项目,它于2003年9月27日发射,是欧洲第一个月球探测器,发射重量380 kg,采用了电化混合推进系统,即单组元推进系统和霍尔电推进系统[3]。其中,单组元推进系统采用了8台1 N推力器,为航天器提供姿态控制;霍尔电推进为主推进,用于缓慢变轨,实现环月探测,并最终实现了月面撞击。图3所示为“智慧1号”探测器示意图。

图3 “智慧1号”探测器示意图Fig.3 View of Smart-1 mission
“隼鸟号”(Hayabusa)是日本宇宙航空研究开发机构(JAXA)研制的近地小行星探测器,它于2003年5月9日发射,发射重量为510 kg,采用了电化混合推进系统,其中,化学推进系统为双组元推进系统,采用了12台20 N双组元发动机,电推进系统采用了微波离子发动机[4]。在进行小行星制动着陆和采样返回时,使用推力较大的双组元系统工作,在长期飞行过程中,采用电推进工作以节约推进剂。图4所示为“隼鸟号”探测器实物图。
“黎明号”(Dawn)是美国发射的小行星探测器,用于开展灶神星(Vesta)和谷神星(Ceres)的探测,它于2007年9月27日发射,发射重量为1 218 kg,采用了电化混合推进系统,其中化学推进系统为单组元推进系统,共有12台0.9 N单组元推力器,为探测器提供姿态控制;电推进系统采用了3台离子发动机,作为主动力[5]。图5所示为“黎明号”探测器推进系统布局图。
1.3 小 结
混合模式推进系统兼顾了双组元大推力、单组元高可靠、电推进高比冲的优势,在深空探测领域中被广泛采用。在星际间变轨、制动、着陆、起飞时采用双组元推进系统提供大推力,在姿控时靠单组元提供精确冲量和小推力;星际间长期飞行时靠电推进提供高比冲。

图4 “隼鸟号”探测器实物图Fig.4 Hayabusa craft
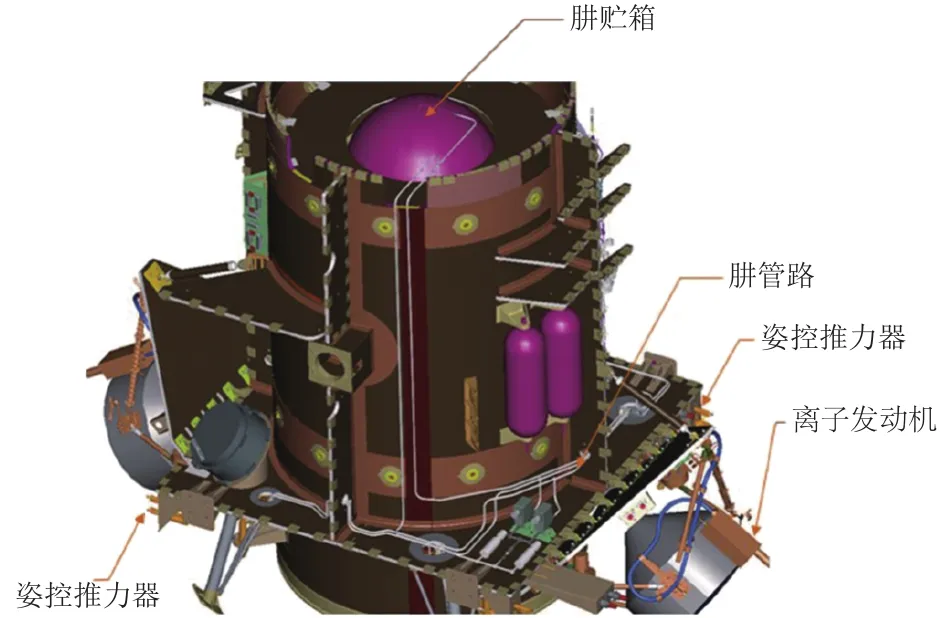
图5 “黎明号”探测器推进系统布局图Fig.5 Propulsion system of Dawn
2 太阳能电推进系统在深空探测的应用
电推进是利用电能加热、电离和加速推进剂形成高速射流而产生推力的推进技术,其比冲一般比化学推进高1个数量级。由于其具有比冲高的独特优势,采用有限的推进剂即可获得较高的总冲,故而在深空探测任务中,得到了广泛应用。目前应用的电推进系统,通常都是由太阳能提供能源,随着探测距离的变化,太阳能所能提供的能源大小也在不断变化,这就要求这类电推进系统应具备适应能源变化的能力。
2.1 应用情况介绍
前面在电化混合推进系统介绍中,简要提到了几种电推进系统在深空探测应用的例子,在此针对电推进部分进一步做详细介绍。
“智慧1号”使用的电推进系统是霍尔电推进系统,由法国Snecma公司研制,采用了一台PPS-1350霍尔电推力器,为探测器提供轨道转移服务。单台电推力器的工作功率为0.4~3 kW,推力范围为38~160 mN,比冲范围为1 600~2 900 s。图6所示为“智慧1号”所使用的霍尔电推力器。

图6 “智慧1号”使用的霍尔电推力器Fig.6 Hall engine of Smart-1
“黎明号”探测器采用的电推进系统是离子电推进系统,由美国喷气推进实验室(Jet Propulsion Laboratory,JPL)研制,采用3台30 cm直径离子推力器进行轨道转移,单台功率范围为0.4~2.3 kW,推力范围为19~92 mN,比冲范围为1 814~3 127 s。图7所示为“黎明号”所使用的离子电推力器。

图7 “黎明号”使用的离子电推力器Fig.7 Ion engine of Dawn
“隼鸟号”探测器采用的电推进系统是微波离子电推进系统,由JAXA和日本电气公司(NEC)公司共同研制,该系统采用4台微波离子推力器,单台额定推力为8 mN,比冲为3 200 s,功率为350 W,工作模式分为4档:100%、90%、80%、65%,可以适应太阳能功率变化的情况。图8所示为“隼鸟号”所使用的微波离子推力器。

图8 “隼鸟号”使用的微波离子推力器Fig.8 Microwave discharge ion engine of Hayabusa
“深空探测1号”(Deep-space1)是美国研制的深空探测器,其主要任务是对包括电推进技术在内的多项新技术进行验证,除此之外再开展科学探测任务。该探测器于1998年10月24日发射,采用可变功率的离子推进系统作为主推进,离子推力器具有16级调节能力,功率范围为0.5~2.3 kW,推力范围为20~92 mN,比冲范围为1 900~3 100 s。图9所示为“深空探测1号”所使用的离子推力器[6]。

图9 “深空探测1号”使用的离子推力器Fig.9 Ion engine of Deep space-1
2.2 小 结
电推进由于具有高比冲的突出优势,能极大地降低航天器燃料消耗,提高载荷的携带量,适合承担深空探测主推进任务。目前深空探测应用的电推进主要依靠太阳能提供能源,离子和霍尔电推进技术应用最为广泛,适应于不同的任务需求,各有优势。由于深空探测的特殊需求,太阳能电推进应能够适应太阳帆板输出功率变化的特点,能够在不同功率下可靠工作。
3 空间核电推进技术在深空探测的研究进展
空间核电推进技术是将空间核电源产生的热能转换为电能,为大功率电推进提供能源,为航天器提供高比冲、大推力的动力,能够使航天器摆脱对太阳能的依赖,可产生高于太阳能电推进几个数量级的推力[7]。空间核电推进技术在远距离深空探测领域具有广泛的应用前景,目前主要航天强国均在大力开展该技术的研究工作。
3.1 空间核电推进系统方案研究进展
2003年,NASA开展了“普罗米修斯”研究计划,该计划由JPL负责,40余家美国研究机构参与,计划研制200 kWe级空间核电推进系统并首先用于“木星冰覆卫星轨道飞行器”(JIMO)探测任务。该项目已经完成了空间核电源初步设计和部分材料研发与试验,大功率电推力器已经完成原理样机的研制。图10所示为“木星冰覆卫星轨道飞行器”构想图。
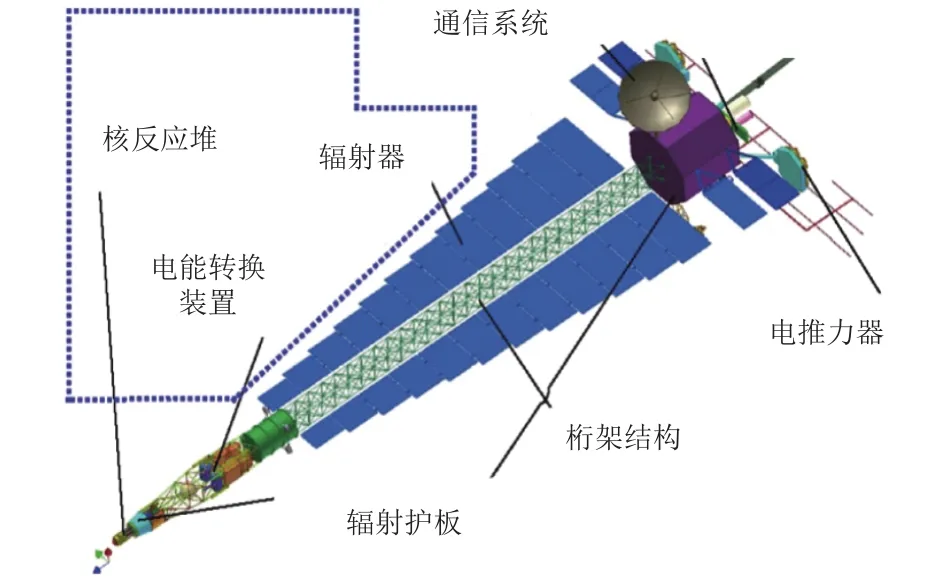
图10 “木星冰覆卫星轨道飞行器”构想图Fig.10 Diagrammatic sketch of JIMO
2009年俄罗斯总统正式批准研发MWe级核电推进系统的航天器,其中核电推进系统由科尔德什研究中心和尼凯叶特研究院联合设计,使用1个3.5 MWt热功率的核反应堆,产生约1 MWe电功率;使用10~20个(含备份)电磁推力器,单台的功率为50 kWe、推力约为0.8 N、比冲7 000 s。图11所示为俄罗斯的核电推进航天器构想图。
2015年EAS为实施其庞大的深空探测计划,提出了DiPoP(颠覆性空间动力与推进技术)项目和MEGAHIT(兆瓦级高效空间动力系统)计划。DiPoP项目重点对30 kWe星表前哨站电源系统和200 kWe核电推进系统进行研究。MEGAHIT计划主要用于确定兆瓦级核电推进系统的技术路线图。
3.2 空间核电推进核心单机研究进展
空间核电推进系统主要由五大子系统构成:空间核反应堆子系统、热电转换子系统、大功率空间热排放子系统、电源管理与分配子系统和大功率电推进子系统,其中空间核反应堆子系统和大功率电推进子系统最为关键。
在空间核反应堆方面,美国先后实施了“SNAP计划”“SP-l100计划”“热离子验证计划”“普罗米修斯计划”和“星球表面基地裂变电源”等多个研发计划,形成了雄厚的技术储备。俄罗斯(含前苏联)开发了Romashka、BUK、Topaz-Ⅰ、Topaz-Ⅱ和兆瓦级核反应堆等电源型号,共向太空发射了37颗空间核反应堆电源[8]。表1所示为国外空间核反应堆电源研发情况列表。
在大功率电推进技术方面,存在多种技术路线,包括大功率离子、大功率霍尔、磁等离子体推力器(MPDT)、可变比冲磁等离子体推力器(VASIMR),目前来看,霍尔、离子推力器受工作原理的限制,其功率很难突破100 kW。当推力器功率大于100 kW时,国外的选择主要有MPDT和VASIMR两种类型,而VASIMR的技术成熟度相对较低。目前,美国、欧洲以及俄罗斯主要选择MPDT作为未来空间大功率电推进的主推力器。2015年NASA发布的空间推进技术发展路线图中,对未来20年内各类空间推进技术的发展情况进行了预测,其中关于大功率电推进技术的预测结果如表2所示。

图11 俄罗斯的核电推进航天器构想图Fig.11 Diagrammatic sketch of NEP craft in Russian

表1 国外空间核反应堆电源研发情况Table 1 List of space nuclear reactors

表2 大功率电推进技术发展预测Table 2 Development perspectives of high power electric propulsion
3.3 小 结
空间核电推进由于具有大功率、高比冲、大推力的优势,是人类开展远距离大规模深空探测任务的最佳选择,能够实现太阳系内天体的快速探测,也适合未来系外天体探测。
以美俄为代表的航天强国已经开展空间核电推进研究30余年,在核电推进系统设计、空间核反应堆和大功率电推进等关键子系统方面均开展了实质性研究工作,并提出了未来发展规划。
4 帆类推进技术在深空探测的应用
空间帆推进是利用太阳光或太阳风携带的能量,通过与航天器的动量交换获得推力的推进技术。按照技术分类,可以分为太阳帆、电帆、磁帆等类型。帆类推进技术能够提供非常微小的推力,适用于推力要求低的特种深空探测任务。
4.1 太阳帆的应用
太阳帆是使用巨大的薄膜材料,将太阳光以及太阳射出的高速气体粒子的辐射压通过动量转换的方式产生推力。目前日本和美国均成功发射了太阳帆探测器。
“伊卡洛斯号”(Ikaros)是由JAXA研制的太阳帆探测器,于2010年5月21日发射,是世界上首个用于深空探测的太阳帆航天器,用于开展金星探测。太阳帆为边长14 m的正方形,厚度仅为7.5 μm,由能够承受太空环境的聚酰亚胺制成,重量约15 kg。帆面边缘贴了液晶元件,用于改变光压分布,产生控制力矩[9]。该探测器的展开效果图如图12所示。

图12 “伊卡洛斯号”太阳帆展开效果图Fig.12 View of Ikaros mission
“纳米帆-D”是由美国NASA研制的太阳帆航天器,于2010年11月19日发射,是首个进入地球近地轨道飞行的太阳帆航天器。“纳米帆”卫星是一颗小立方星,搭载在FASTSAT卫星上发射,展开后的太阳帆面积为9.29 m2[10]。该探测器的展开效果图如图13所示。

图13 “纳米帆-D”太阳帆展开效果图Fig.13 View of Nano Sail-D mission
4.2 电帆的应用
电帆是2004年芬兰科学家Pekka Janhunen提出的。电帆利用空间带正电导线的电场,使太阳风中的质子在电场发生偏转,通过动量交换的方式使航天器获得推力。由于电帆没有固定帆面,其质量比太阳帆又有大幅降低,特别适合深空探测任务。电帆推进系统由展开机构、导线、电源调节模块和电子枪4部分组成[11]。
ESTCube-1卫星是由爱沙尼亚研制的电帆试验立方星,2013年5月发射,运行轨道为600~800 km轨道,目的是测试地球低轨道下通过地球电离层的电帆效应。电帆长度为10 m,通过自旋展开,自旋周期为20 s,电子枪电压为500 V。图14为该探测器的效果图。

图14 ESTCube-1卫星效果图Fig.14 View of ESTCube-1 mission
4.3 磁帆的研究进展
磁帆由Andrews和Zubrin于1988年首次提出。磁帆是利用太阳辐射出的带电粒子在固定磁场中偏转,而将部分动量传递给航天器以获得加速度的一种推进技术[12-13]。磁帆需要使用超导材料产生巨大的磁场,所需超导线圈的直径极大,重量成本很高,工程应用难度大,国外的研究也只是停留在理论研究阶段,技术成熟度仅为2级。
4.4 小 结
空间帆类推进技术是深空探测领域一种新型的推进技术,它自身无需携带推进剂,仅依靠太阳光压或太阳风就可以获取动能,可以得到较高的速度增量,适用于执行特种深空探测任务。
5 总 结
对国外深空探测推进技术的应用和研究进展进行总结,可以对我国深空探测推进技术的发展和应用提供参考,具体如下:
1)深空探测由于任务的多样性,牵引了多种推进技术的发展,其中混合推进、太阳能电推进、核电推进及帆类推进具有广泛的应用前景。
2)混合模式推进适用于具有快速轨道转移、快速制动、着陆和采样返回类型的探测任务需求,是应用较多的推进类型。
3)太阳能电推进能够用较少的推进剂产生较大的速度增量,但由于推力较小,需长时间持续加速,适用于任务周期较长的深空探测任务,且需要具备适应能源变化的能力。
4)空间核电推进具有比冲高、推力大、能源不受限制的优点,适用于大规模深空探测任务,是未来需要重点发展的推进技术。
5)帆类推进技术属于特种推进类型,自身无需携带工质,为深空探测任务提供了更多的方案选择,可以承担一些独特的深空探测任务。