电器电磁系统动态特性仿真实验的设计和开发
2019-01-09李晓霞李艳雨于海旭
李晓霞, 李艳雨, 于海旭, 耿 惠
(1. 河北工业大学 省部共建电工装备可靠性与智能化国家重点实验室, 天津 300130; 2. 河北工业大学 河北省电磁场与电器可靠性重点实验室, 天津 300130)
学生在学习电器理论和专业的过程中,经常需要做的实验包括电器的动作特性实验、吸力特性实验、时间特性实验等。由于实验需要用实际的电器产品,因此这些实验主要是静态实验。电磁系统的静态特性可以反映衔铁在各稳定位置上电磁吸力与气隙值之间的关系,可以判断在一定的激磁电压或电流下能否可靠地动作或释放,但却不能反映电磁系统的时间特性——电磁参量和机械量在衔铁运动过程中的变化。但在工程技术中,对于以电磁系统作为感测和驱动部件的电气元件都要求其动作时间或释放时间在规定范围内。传统的电器理论实验主要是进行电磁系统的静态实验,可以表征各静态参数之间的关系,但对于参数的动态变化反映不足[1-7]。
随着Matlab等软件的应用,使得直观地展示电磁系统的动态运行过程成为可能。本文利用Matlab/Simulink建立电磁系统动态特性的仿真实验平台,通过仿真研究衔铁的行程、运动速度、线圈电流、电磁吸力随衔铁吸合的变化过程[8]。对电磁系统的仿真可以分为电路部分、磁路部分和限位控制部分,以触头的速度为反馈量,通过PID控制来调整触头的闭合与分断[9-17]。
1 电磁系统动力学的基本方程
整个电磁系统的动力学问题主要表现在两个方面:一是电磁参量对作用于衔铁的电磁吸力的影响;另一个是电磁吸力和反作用力对运动参数,即速度和时间的影响,整个动态过程由以下两个方程决定:
2 电磁系统仿真实验平台的搭建
Matlab软件已经广泛应用于动态系统仿真,它既可以用于连续系统和离散系统,也适用于线性系统和非线性系统。Simulink功能强大、使用简单方便,是Matlab软件的重要软件包。根据电磁系统的动力学方程,采用Matlab/Simulink软件建立仿真实验平台。
2.1 电磁结构模型
本实验平台采用常用的U形拍合式电磁结构(见图1)。

图1 U形拍合式电磁结构和等效磁路
其磁路方程为:
其中归算漏磁导:
衔铁部分磁压降:
Ux=ΦδRm0=HxLx
轭铁和铁心部分
Ut=Φ1Rt=Φ1(2Rm1+Rm2)=HtLt
2.2 教学实验仿真平台的3个模型
根据电磁系统动态特性原理,电磁系统动态特性仿真平台由电路模型、磁路模型以及运动方程模型3部分组成。
2.2.1 建立电路模型

(1)
建立的Simulink电路模型如图2所示。
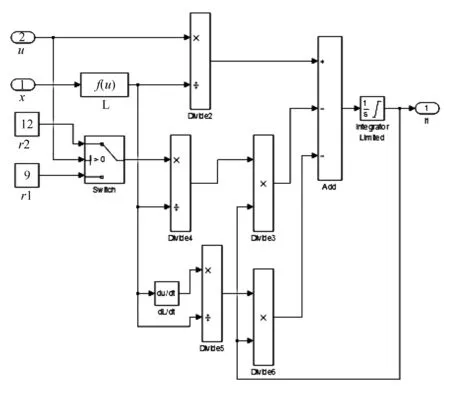
图2 电路模型
图2中,输入端1为衔铁的位移反馈信号,输入2为线圈的电压输入量,函数f(u)为电感关于位移的方程。Switch为数据选择模块。当电压为大于0时,线圈电阻选择r2;当电压等于0时,线圈电阻为r1。
2.2.2 建立磁路模型
磁路方程主要是吸力F与磁感应强度B和横截面积A的关系。转化为F与电流I和位移量x的方程。由麦克斯韦磁力公式
(2)
建立如图3所示的磁路模型。

图3 磁路模型
图3中,输入端为电磁铁线圈供电的电流信号,n1为线圈匝数,输入端2为衔铁的位移信号。模块fun1为气隙磁导,查表模块中存放磁铁材料B-H曲线;fun3为麦克斯韦吸力公式,得到电磁吸力F,输出端为吸力F。
2.2.3 建立运动方程模型
动态特性仿真过程中,需建立运动方程模型,可以反映在不同电压下衔铁的位移、加速度、速度等情况。
F=ma=F吸-F斥
(3)
(4)
(5)
在电器结构中,由于衔铁的运动是在气隙的范围内,所以为了能仿真碰撞过程,需要在运动方程的基础上加设一个限位控制模块,通过控制衔铁速度和位置达到限位的目的。根据方程和逻辑关系建立运动方程仿真模块如图4所示。
2.3 总仿真实验平台
在以上3个模型的基础上,搭建总仿真实验平台如图5所示。
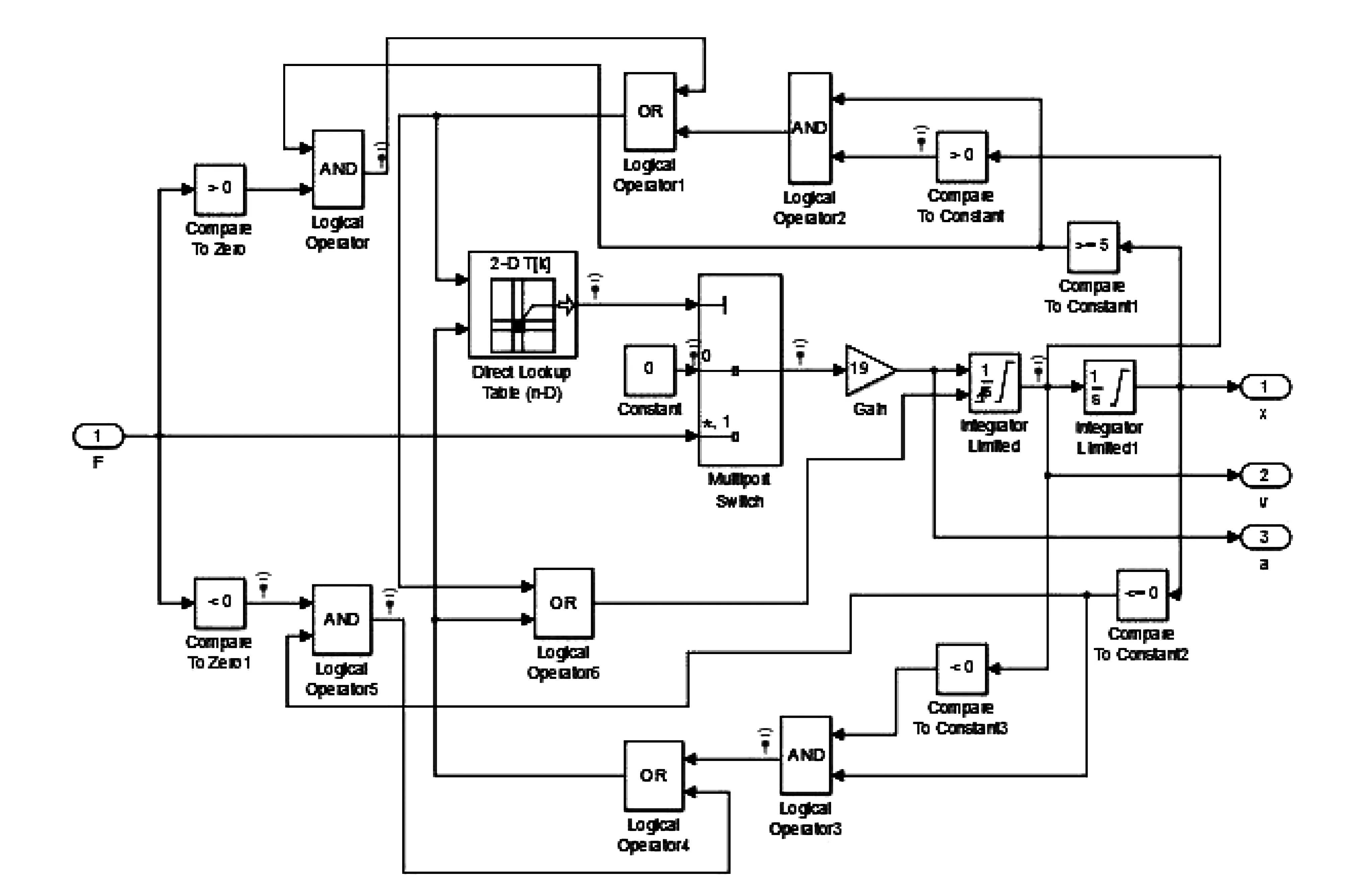
图4 运动方程模块
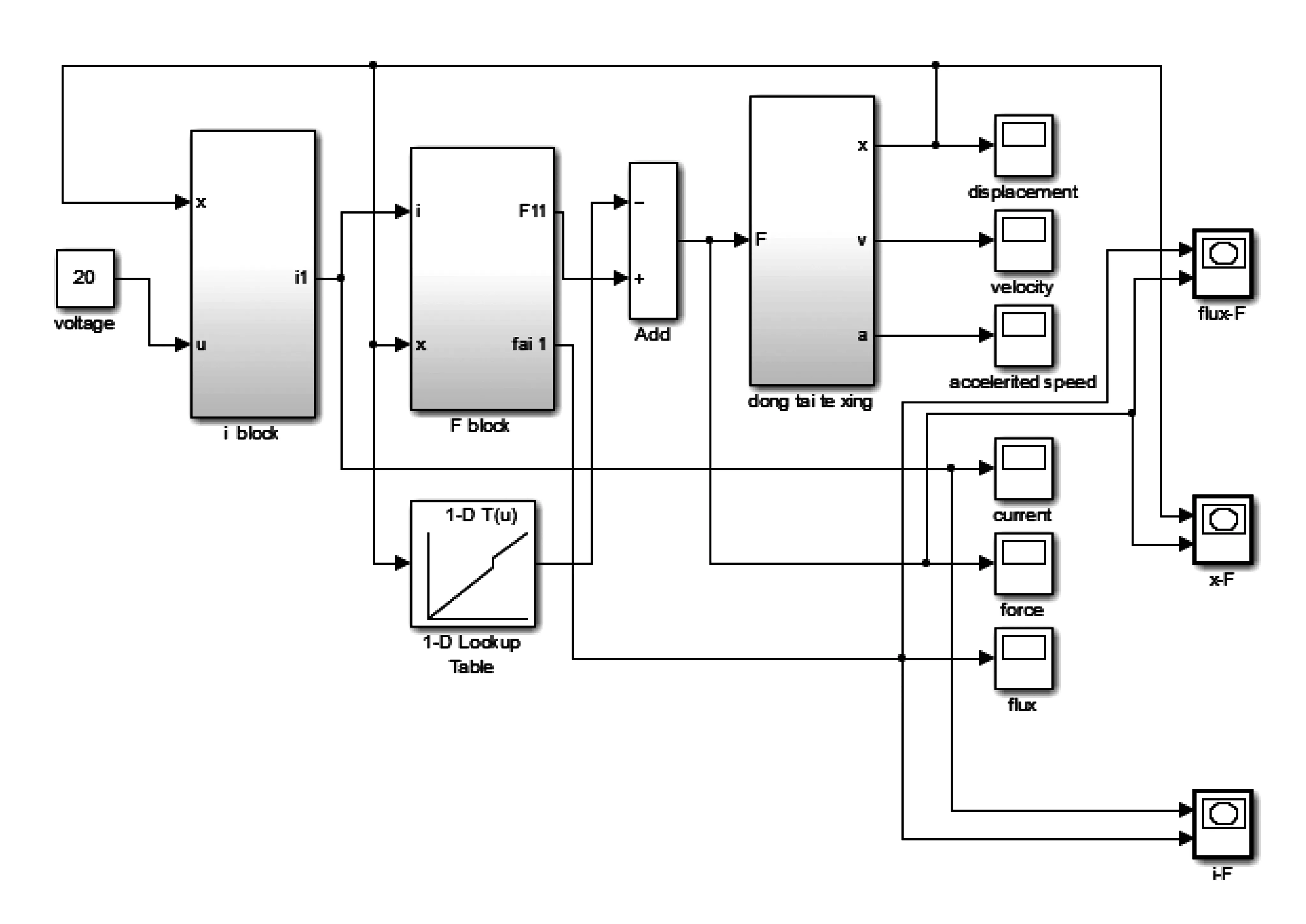
图5 仿真实验原理图
3 电磁系统仿真实验平台的实验实例
电磁系统仿真实验的参数设置为:
U形电磁铁气隙长度为5 mm;
衔铁长度5 cm,宽1 cm,高0.5 cm;
铁心和轭铁高7 cm;
线圈匝数为300匝;
给定线圈的电压为20 V。
考察电磁系统的气隙磁通、触头运动速度、触头接触力和电磁吸力动态变化过程,实验结果如图6—图11所示。

图6 气隙磁通变化动态特性
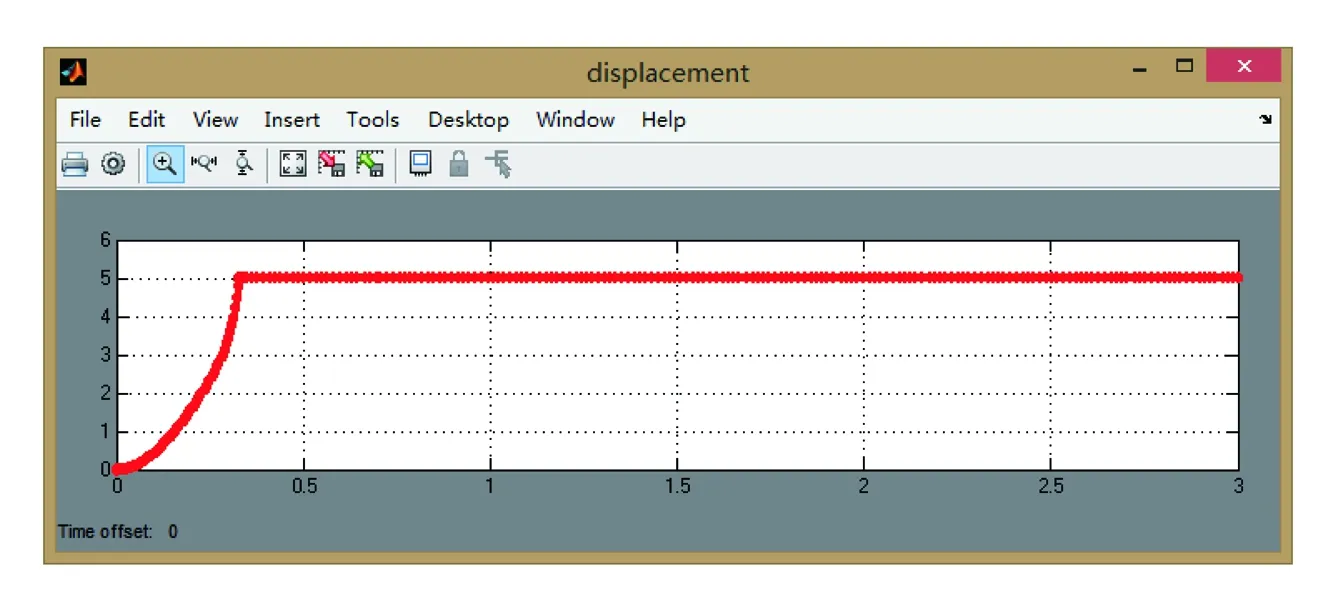
图7 衔铁位移动态特性

图8 衔铁速度动态特性

图9 衔铁加速度动态特性

图10 电流动态特性
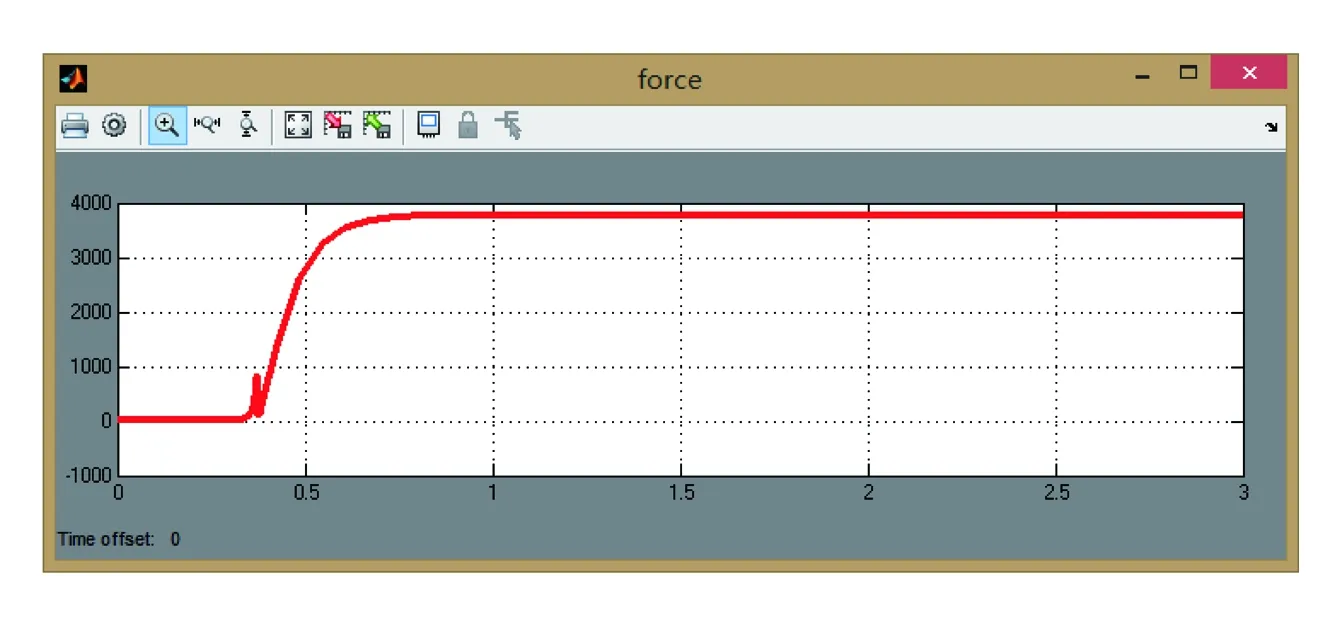
图11 触头压力动态特性
在电器电磁系统仿真实验结果中,可以观察到:在通直流电压时,电磁系统的吸合时间为0.375 s,衔铁的位移曲线经历由小变大、逐渐增加的过程。其中位移、速度、加速度的曲线开始时上升斜率很小;随着时间的增加,斜率变大。在时间为0.375 s时,位移曲线达到最大值,此后曲线一直维持5 mm的位移,触头吸合。速度曲线在位移达到最大值时,受到强制力的作用瞬变为0,此时衔铁仍然受外力作用一直吸合,触头处于关断状态。
观察图10中电流曲线,可见电流快速增加,然后在0.375 mm的位置,触头的电流却减小了,随后又稳态增加,达到稳定值。由于电感的作用,电流从0开始呈指数状态函数上升。当电流达到某一数值时,触头受电磁吸力的作用,开始运动,位移增加,气隙减小,漏磁通减少,此时电流为启动电流。
随着位移的变化,电感系数开始变化,气隙越小,电流的变化速度就越快。此时电感也会因磁通变换率增大而产生反电动势,来减缓电流的变化,所以此时电流会有减小的那部分。当衔铁受电磁吸力的影响,到达限定位置后,电感的系数与磁通气隙固定不变。磁通不再变化,反电动力消失,线圈中的电流开始逐渐增加知道电流稳定不变达到最大值。各个参数都与实际运行相符。
仿真平台还可以得出各参量间的动态变化关系图,有助于学生理解各参量间的相互影响。触头力随着衔铁位移的变化如图12所示,触头力随着气隙磁通的变化如图13所示。
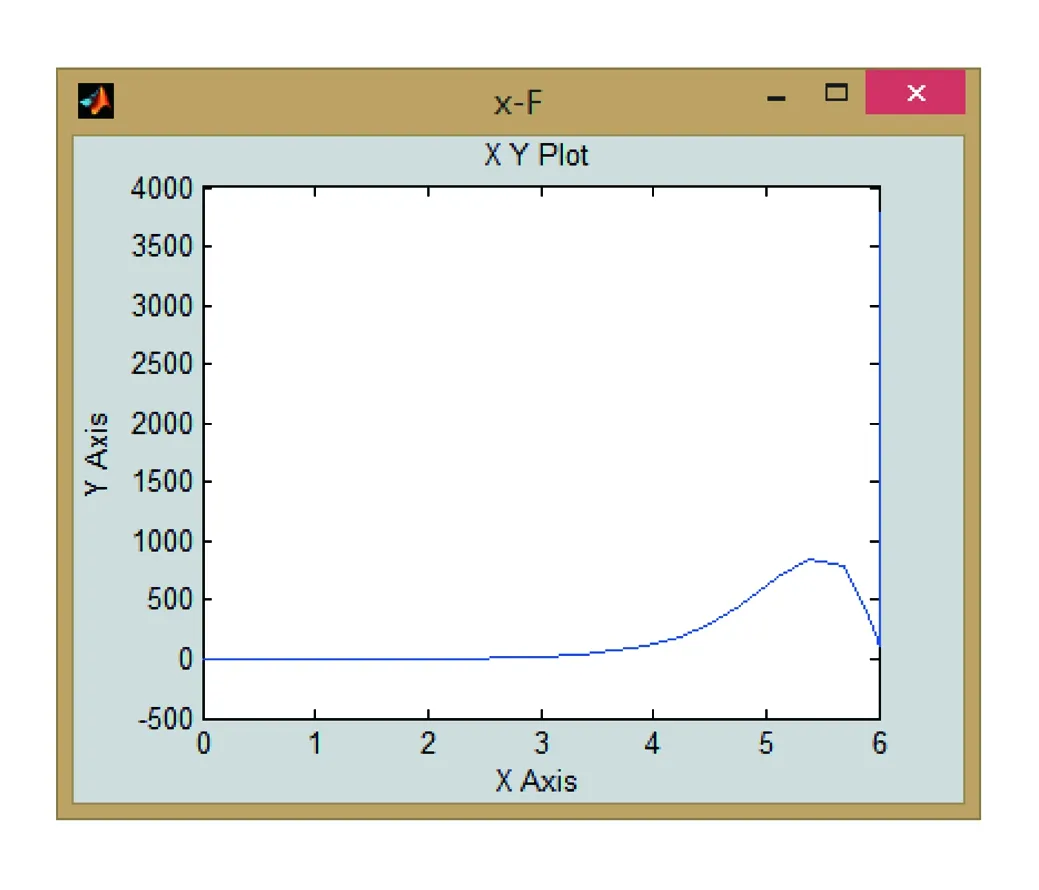
图12 触头力随着衔铁位移的变化仿真图

图13 触头力随着气隙磁通的变化仿真图
从以上实验结果可以看出,学生能够直观地看到电磁系统的动态运行过程,弥补了实物实验中不能看到动态变化过程的不足。
4 结论
通过电磁系统动态特性仿真实验,可以观察触头的运动情况及其规律,判断触头是否弹跳闭合。利用该平台可以容易地分析不同电流参数条件下系统的仿真结果,把复杂的动力学模型简单、直观地展示出来,有助于学生对电磁系统的全面理解,为电器理论的教学和实验提供新的实验平台。