基于PXI的永磁同步电机RCP教学实验平台设计
2019-01-09毕大强郭瑞光陈洪涛
毕大强, 郭瑞光, 陈洪涛
(清华大学 电机系 电气工程实验教学中心, 北京 100084)
快速控制原形(RCP)技术近些年快速发展,被广泛应用在航空航天、汽车测试领域,不仅加快了产品的快速研发,而且在复杂环境下开始验证控制算法,减少了实验测试中的故障发生概率,加快先进控制算法在产品中的应用[1-4]。
文献[5-6]采用dSPACE实时仿真设备设计对永磁无刷直流电机进行了RCP设计。文献[7]基于PXI和RT_LAB实现永磁同步电机快速原形设计,但是使用设备多,增加了系统复杂度,同样也增加了系统成本。文献[8]基于RT_LAB设计了三电平H桥RCP实验平台。文献[9]采用dSPACE设计了基于RCP的混合动力控制系统,验证了采用RCP控制符合实际系统工作需求。文献[10]采用TI公司DSP2812实现快速控制原形控制器,采用Simulink自动代码生成,但是其资源有限,并且只能采用定点运算,制约了它在Simulink中的图形化编程。文献[11]将基于NI PXI的快速控制原形技术应用在微电网仿真控制中,参与微电网协调控制。
在高校电气工程专业,为培养并提高学生将永磁同步电机控制技术理论与实践快速结合的能力,都很重视快速RCP技术。但是当前相关永磁同步电机RCP技术教学平台的研发却相对较少。为此,本文研制了基于PXI的永磁同步电机RCP教学实验平台。该平台采用NI控制器+永磁同步电机变频驱动电路结构,其中NI控制器负责运行控制算法,变频电路负责驱动实际的永磁同步电机。采用Simulink自动代码生成技术将仿真算法快速生成可执行控制代码,利用NI-VeriStand 软件将生成的永磁同步电机控制算法加载到NI 控制器进行驱动电机运行,无需对控制算法进行二次编程,减少算法验证时间,提高先进算法在永磁同步电机控制应用中的进度与效率,方便学生快速设计并且实现先进的电机控制算法。
1 永磁同步电机RCP平台设计
1.1 平台硬件组成
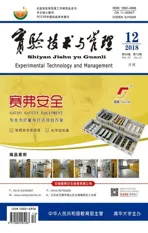
如图1所示,实验平台由上位机(PC机)、控制器、变频驱动电路、永磁同步电机组成。
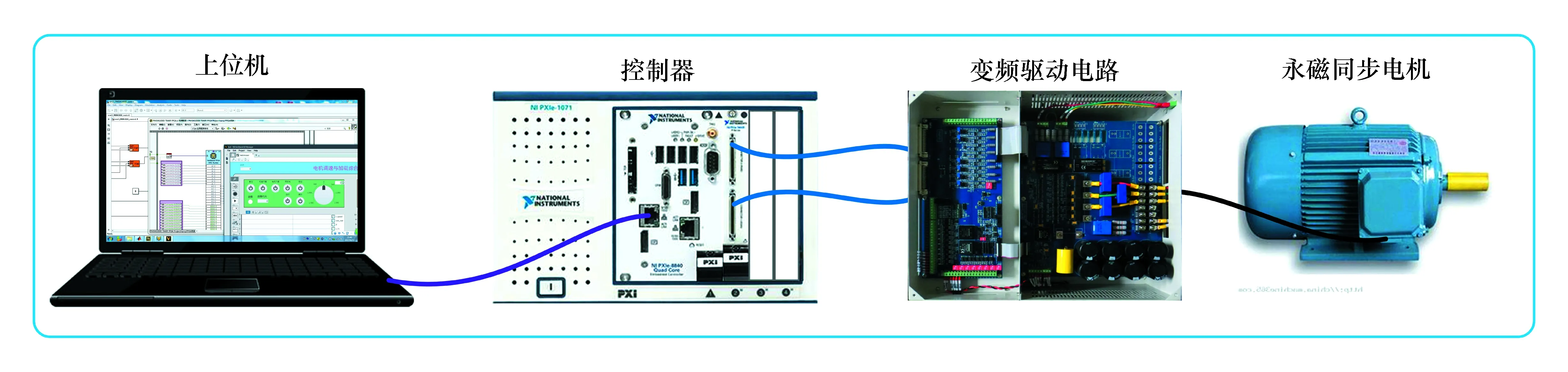
图1 永磁同步电机RCP实验平台硬件组成
上位机操作的软件有Matlab/Simulink、LabVIEW和NI-VeriStand,主要负责打包控制程序,然后下载到控制器中,并且监控控制状态。
控制器主要由NI-PXI控制器和NI-PXI-FPGA板卡组成。控制器的作用是运行永磁同步电机控制算法,FPGA板卡首先负责把变频驱动电路传感器采集到的电压/电流模拟信号转换成数字信号,以及采集编码器脉冲并计算电机转速信号,最后将信号传递到控制器中参与运算;其次利用其高速并行特性,输出PWM脉冲信号驱动变频驱动电路,达到控制实际电机效果。
变频驱动电路与永磁电机组成被控对象,变频驱动电路主要负责功率变换,将直流电变换成交流电驱动永磁同步电机运行。通过磁粉制动器可为永磁同步电机加载,模拟不同工况下的负载变化情况。
1.2 平台软件结构
软件实现方式采用模块化独立编程思想,使学生对整个控制思想和控制流程的理解更加直观方便。采用3种软件(Simulink、LabVIEW和VeriStand)对永磁同步电机模块化编程。Simulink主要负责永磁同步电机的控制算法,LabVIEW主要负责软FPGA硬件IO配置及对应关系,以及PWM信号产生与高速信号采集的编程,VeriStand主要负责软件集成及下载运行和上位机监控系统的快速实现,实现过程如图2所示。
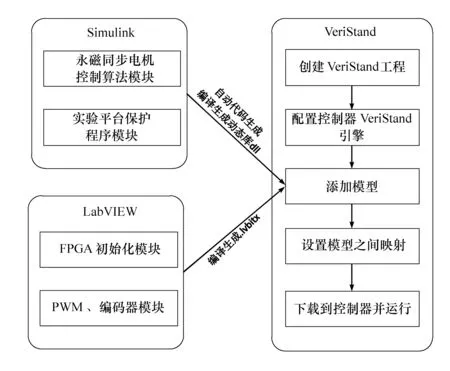
图2 永磁同步电机控制实现过程
在Matlab/Simulink环境下进行永磁同步电机算法仿真以及仿真算法的自动代码生成,快速形成控制器可执行控制代码,能够快速实现算法的验证以及与其他算法对比分析,加快算法的优化速度。
LabVIEW软件通过对FPGA编程,实现实际硬件IO的不同配置,对高速信号进行快速实时处理。
NI-VeriStand环境的作用主要有2个方面,一是将Simulink自动生成的控制代码和LabVIEW生成的IO配置文件下载到控制器,然后进行相关的配置,实现对永磁同步电机的控制;二是通过VeriStand软件快速实现对控制电机监控上位机的设计,上位机与控制器通过以太网进行通信,实现对电机实际电压电流瞬时波形的实时监测。
2 实验平台搭建与实验
2.1 永磁同步电机RCP实验平台搭建
实验平台的外观如图3所示。PXI控制器由NI PXI 1071机箱、NI PXI 8840控制器和NI PXI 7846R FPGA板卡组成。VeriStand软件通过以太网线与PXI控制器通信,利用VeriStand为控制器下载永磁同步电机控制算法并且监控电机状态。
电机驱动电路额定功率为10 kW,直流输入电压为560 V,交流输出电压为380 V。电机驱动电路通过并行数据线与PXI控制器相连,利用上位机控制并检测电机驱动电路工作状态。
隔离变压器额定容量为10 kVA,接线方式为Yd11,变压器变比为400V∶400V,副边侧与逆变器连接,原边侧与电网连接。
永磁同步电机额定容量为10 kVA,额定电压为260 V,额定转速为1 500 r/min,额定电流为22 A,转速范围为0~2 000 r/min,极对数为4。
磁粉制动器加载转矩范围为0~230 N·m,永磁电机额定转矩为63 N,所以将磁粉制动器转矩限制电机额定转矩范围内。
图3 实验平台外观
2.2 永磁同步电机RCP实验平台监控上位机
RCP技术快速缩短了产品开发周期,同时在教学过程中也增加了学生做实验的快速性与安全性。本文利用VeriStand软件快速搭建永磁同步电机RCP实验平台监控上位机,监控界面如图4所示。主要由平台控制区,平台主要参数监测区和示波区组成。
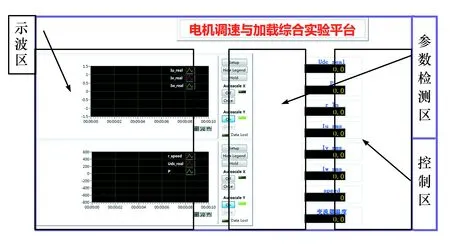
图4 RCP实验平台监控界面
平台控制区由7个布尔控件,1个速度输入,1个故障指示灯和1个故障代码显示组成。其中7个布尔控件分别是复位、机箱风扇开关、永磁电机风扇开关、预充电继电器开关、运行继电器开关、永磁电机初始角度定位开关和速度启动开关组成。
平台主要参数监测区由直流母线电压监测值Udc_real、永磁电机有功功率P、永磁电机电磁转矩r_Tn、电机定子三相电流有效值Iu_rms、Iv_rms、Iw_rms、电机转速speed、变流器温度组成。
平台示波区可以观察电机定子电流实时波形详细情况、电机转速r_speed、实验平台直流母线电压Udc_real和电机功率P等。通过示波器下方的工具,可以对波形进行拉宽、放大、缩小等操作。
2.3 永磁同步电机控制策略
永磁电机控制方式有多种,本文采用电机定子d轴方向分电流id=0控制方式,首先建立d、q同步旋转坐标系永磁同步电机的数学模型。当旋转坐标系的d轴与转子磁链相重合,其数学模型可以表示为:
其中,Ld、Lq是电机定子直轴和交轴电感,vd、vq、id、iq为d、q坐标系下永磁同步电机定子的电压和电流,R是电机定子电阻,Ψd、Ψq为d、q轴磁链,Tem为电机电磁转矩,pn为转子极对数,ωg是电机转速,Ψr是转子磁链,Tload为负载转矩,J为系统转动惯量。
根据式(1)可建立永磁同步电机的矢量控制系统。图5是永磁同步电机的控制框图,采用转速外环和电流内环控制。转速外环和电流内环调节器都采用PI控制。
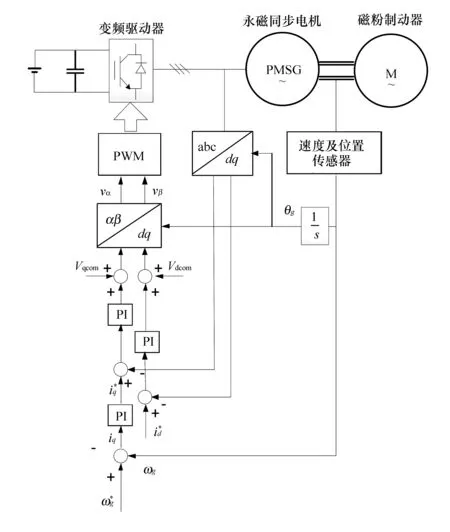
图5 永磁同步电机控制原理图
2.4 永磁同步电机运行实验
给定转速为1 000 r/min空载启动,结果见图6。由图6可知:电机转速r_speed缓慢爬升,当转速稳定后r_speed为1 000 r/min;空载时永磁同步电机定子电流很小。
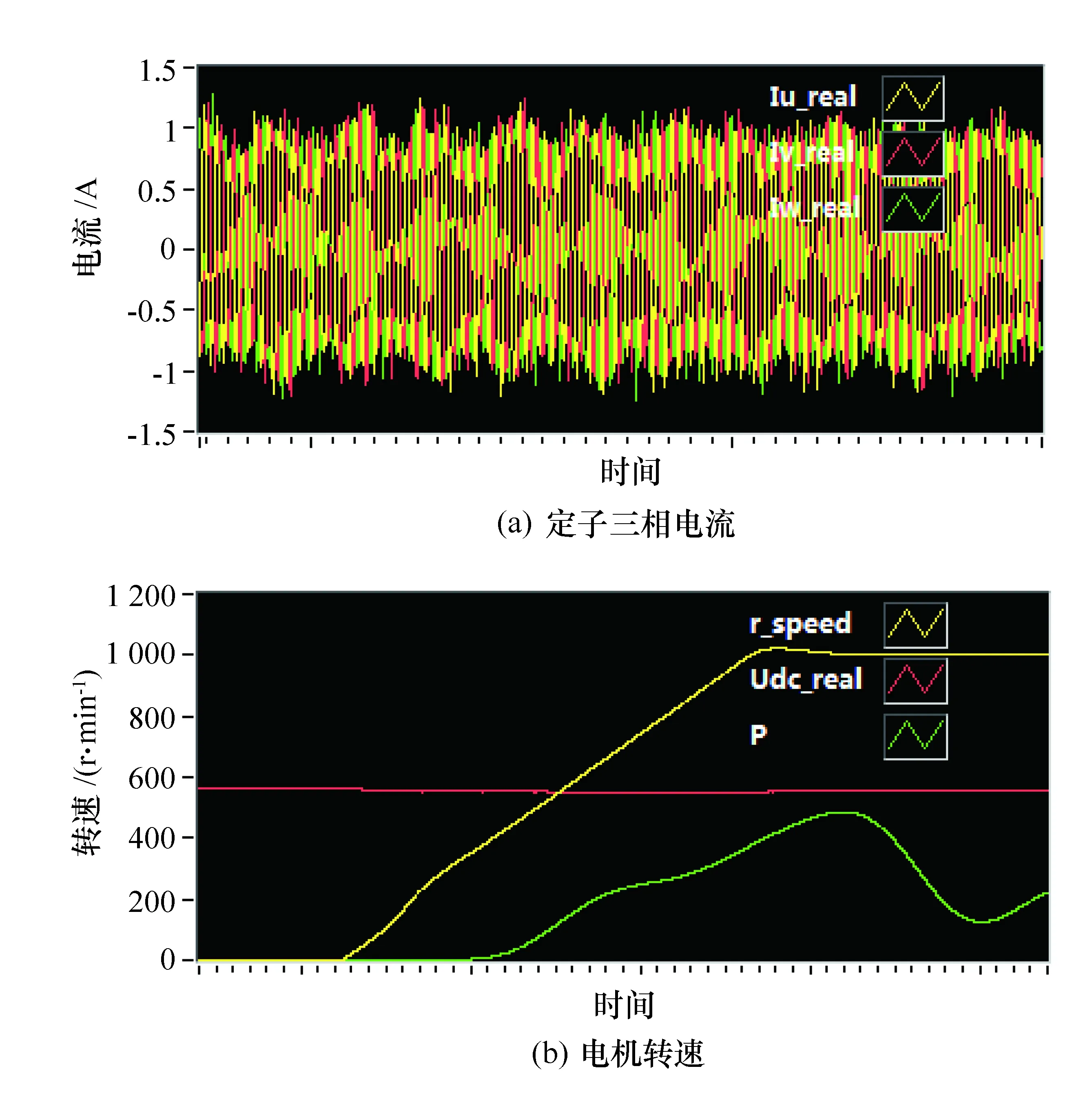
图6 1 000 r/min空载启动
图7为电机运行在转速1 000 r/min下的输出功率为2.25 kW的波形图。由图7可知,电机转速稳定在1 000 r/min,永磁电机定子电流正弦性能良好。
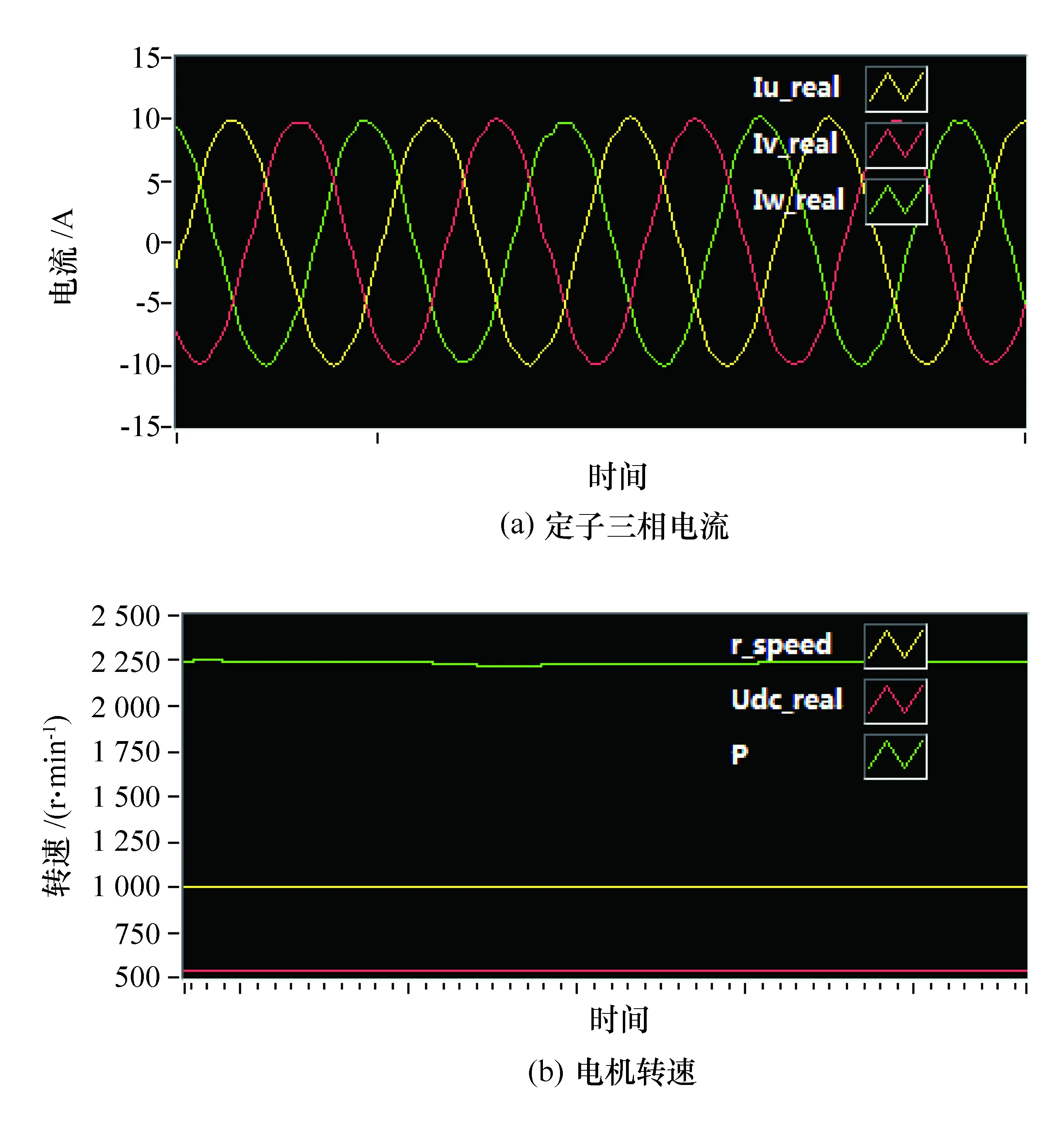
图7 转速1 000 r/min加载
图8为初始给定转速600 r/min时控制磁粉制动器为电机加载,控制负载转矩不变,电机转速指令值由600 r/min变为1 000 r/min的波形图。由图8可知,通过控制,电机转速逐渐稳定在1 000 r/min,电机定子电流缓慢变化,没有瞬态冲击,说明电机的恒载变速过程控制良好。
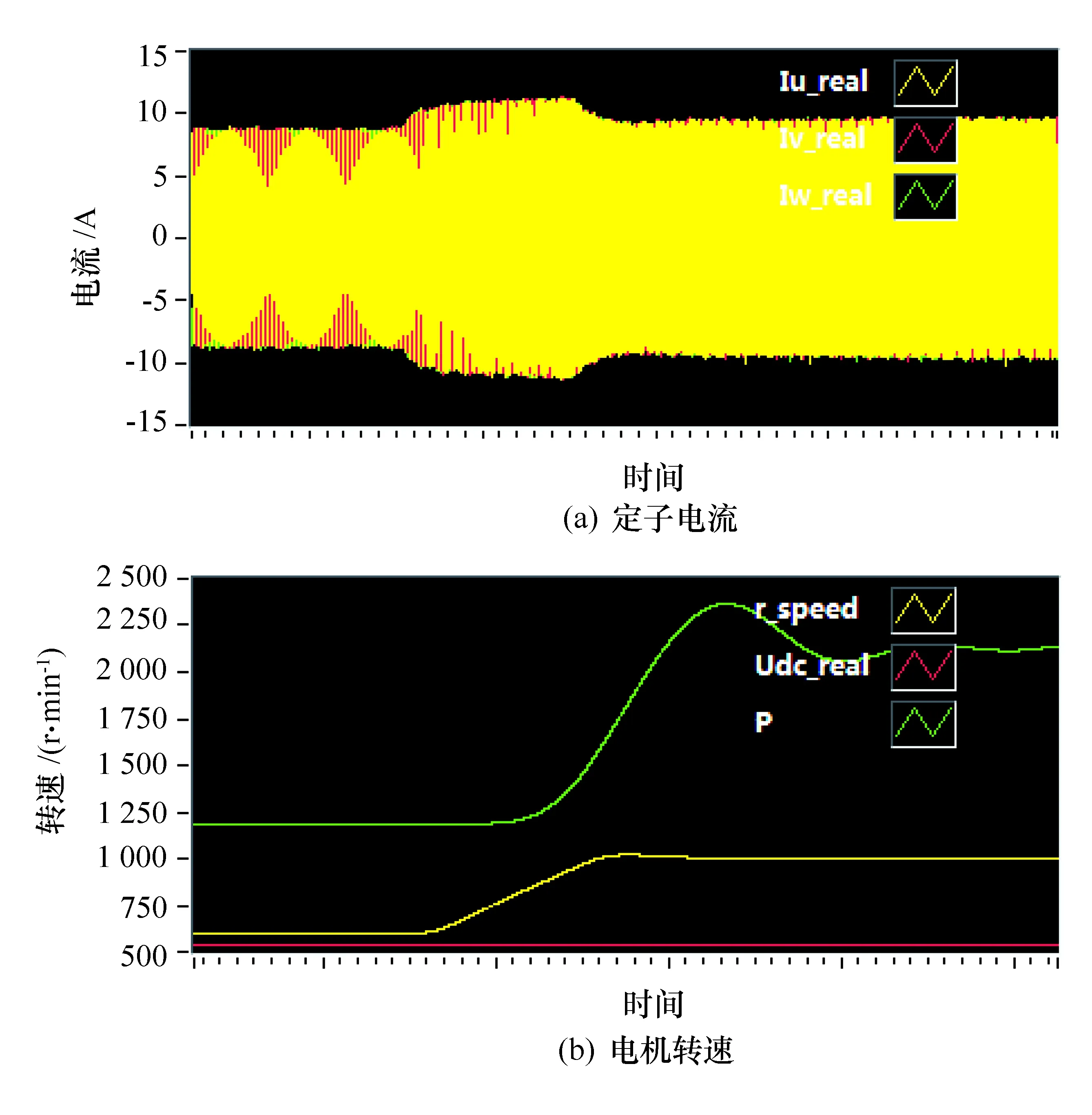
图8 恒载600 r/min变1 000 r/min运行
图9为带载正反转切换过程,转速由+700 r/min变为-700 r/min,运转正常。
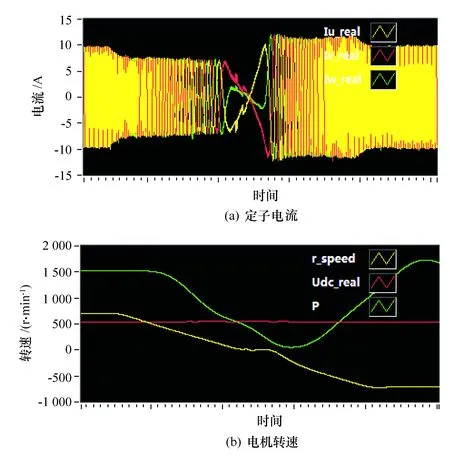
图9 带载正反转切换
3 结语
为提高永磁同步电机控制教学实验与科研实验的效果,设计了基于PXI永磁同步电机RCP教学实验平台,利用PXI控制器的丰富资源既可模拟实际控制器,又可快速实现上位机图形化编程,方便学生理解控制原理,控制自动代码生成,易于新控制算法的快速实施与验证。