海面舰船时间统一方法与系统
2019-01-09张丹
张 丹
(92493部队,辽宁 葫芦岛 125000)
0 引言
精确的坐标系统和时间系统是舰船指挥、试验、演练的基本前提,舰载时间系统为舰船中的装设备提供统一的精确时间信息、时间标记信息或约定的时间控制信号。舰船编队指挥、试验、演练的特点决定了其指挥单元分布广阔,每个舰船要互相配合完成共同的任务。要使所有舰船装设备协调工作,得到准确可信的数据信息和资料,必须实现全系统的时间和频率统一。
时间统一系统中最关键的部分是时间传递,只有通过时间传递系统将时间频率中心产生的标准时间可靠地传送到各时统节点和时统终端,才能保证整个时间统一系统的时间与标准时间保持一致,达到系统内部时间统一的目的。目前,时间传递方法大致分为两类,一类是网络授时、长波授时、短波授时、电话授时、电视授时等方法,精度较低,为微秒或亚微秒量级,主要用于民用;第二类精度较高,国际上常用的时间传递技术是卫星时间传递和双向时间传递技术(TTWT)[1]。卫星时间传递系统利用空间的无线电波(卫星到用户的直达波)作为传输介质,无线电波大部分时间是在近似真空下传播的,可以达到很高的精度。目前应用最为广泛的卫星授时系统有美国全球卫星定位系统(GPS)、俄罗斯格洛纳斯系统(GLONASS)、欧盟伽利略卫星导航系统(GSNS)和中国北斗卫星导航系统(DBS)等。双向时间传递又分为卫星双向时间传递、微波双向时间传递和光纤双向时间传递[2]。其中,卫星双向时间传递和光纤双向时间传递要求节点位置固定,并且光纤传递需要铺设光缆,这两种方式只适合陆地,对于海面舰船不适合。微波双向时间传递是利用微波视距链路进行时间信号的传递,时间传递的两个节点位置可以不固定,不需铺设光缆,它可用于视距距离内(一般为300km以下)两个运动平台之间的时间同步,是适合海面运动节点时间同步的最佳方法。
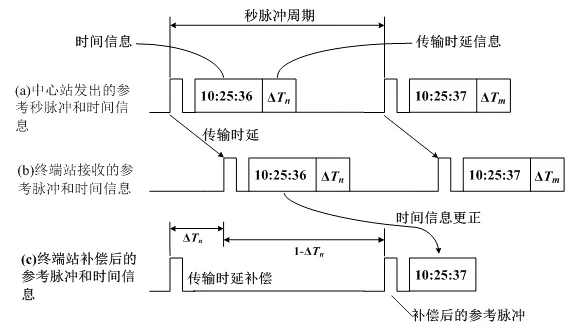
图1 高精度时间传递的基本原理Fig.1 Fundamentals of high precision time transfer
1 舰载微波双向时间传递原理
1.1 高精度时间传递原理
在高精度时间传递系统中,中心站一般配备高稳原子钟(如:铯原子钟或铷原子钟),系统需要将此高稳钟源输出的标准时间信息(如1PPS信号)准确地送给终端站,并在终端站恢复出来送给时间用户。送给用户的时间要与钟源输出的时间相一致,系统需要克服或者补偿时间信号从钟源输出到终端站恢复过程中的传输时延。一般是将钟源的时间信号在中心站推迟送出或者将终端站接收到的时间信号进行延时,推迟或延时的量为1s减去传输时延,这样终端站的秒脉冲位置将与中心站下一秒的位置相重合,只需要将协调世界时(UTC)的时刻值简单加1,即可实现终端站恢复的时间信号与钟源输出时间信号完全重合[3]。其实现原理如图1所示,其中ΔTn为当前的传输时延。
图1中授时中心向授时站发送的电文包括:1PPS秒脉冲信息、秒脉冲对应的UTC时刻信息以及该秒脉冲从授时中心传到授时站的传输时延信息ΔTn。授时中心除了提供标准的1PPS信息和UTC信息外,还需要提供ΔTn,授时站则需要记录它接收到的每一个秒脉冲的精确位置,并由这个位置和ΔTn的值估计下一个秒脉冲的位置,这个过程称为传输时延补偿,授时站完成时延补偿后向时间服务对象输出lPPS信息和修正后的UTC时间,提供时间服务。时间服务的精确度取决于授时中心到授时站的传输时延信息的准确程度和授时站传输时延补偿的精确度。
1.2 微波双向时间传递原理
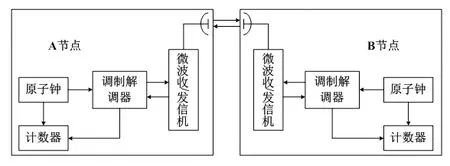
图2 微波双向时间传递系统组成图Fig.2 Composition diagram of microwave bidirectional time transfer system
微波双向时间传递基本原理是:两个节点在各自时钟的同一时刻在视距内发射时间同步信号,然后接收对方的时间同步信号,根据各自时钟的发送时刻和接收时刻信号的时刻来计算两站之间的时延,进而计算出两节点之间的时钟钟差。通过校准后,实现两节点之间的时间同步。但在两节点之间通过微波双向法进行时间传递的过程中,由于设备的时延、空间大气折射和节点舰船运动等因素的影响,时间间隔计数器的测量值并非两节点时间基准的真正时间差值,而是包含了诸多时延。
1.3 微波双向时间传递系统组成
微波双向时间传递系统主要有原子钟、微波收/发信机、调制解调器(Modem)和时间间隔计数器(TIC)等设备,系统组成如图2所示。
微波双向时间传递系统中,信号流程如下:由脉冲分配器把原子钟产生的1PPS信号分成两路,其中一路送至调制解调器进行调制,另外一路送至时间间隔计数器作为开门信号计数。前者到达调制器后进行BPSK(Binary Phase Shift Keying——双相移相键控)调制,然后再将调制好的信号生成70MHz的中频信号,并作为调制器的输出信号,70MHz的中频信号输入上变频器进行变频为500MHz~650MHz的信号,再经功率放大器放大后,由发射终端把信号发射出去。对方站收到信号后,由接收终端接收,通过低噪声放大器,信号输入下变频器,将信号变为70MHz的中频信号,然后将70MHz的中频信号输入解调器,最后将解调器输出的1PPS信号输入时间间隔计数器作为关门信号终止计数器计数。在A节点进行微波双向时间传递操作的同时,B节点也进行同样的操作,两节点地位相等,通过两节点的数据交换,完成整个双向时间传递的技术操作全过程。
2 舰载微波双向时间传递的误差分析
在微波双向时间传递中,虽然由于信号的传播路径近似对称,使路径的影响原则上大部分被抵消,但是仍然有一部分非对称性的因素影响了微波双向时间比对的精度。这些因素主要有:1)时间间隔测量引入的误差;2)设备的系统误差;3)信号空间传播路径上的误差,主要是空间大气折射率引起的时延;4)信号在传播过程中舰船的运动引起的时延误差。
2.1 时间间隔测量误差
两节点之间的时差一般由高精度的时间间隔计数器来完成,现代高精度计数器的测量精度已经达到几十ps量级。因此,该项误差对于时间同步精度为纳秒级别的可以忽略。
2.2 设备时延误差
主要是设备发送和接收的时延误差,包括调制解调器误差、电缆时延误差、发射和接收系统随气象(主要是温度)的变化误差等。
1)调制解调器误差
信号经过调制解调器进行调制和解调的过程中,都会产生延迟。美国AOA公司的TW-100和德国TimeTech公司的SATRE用于卫星双向时间传递,一般估计其误差约为30ps~100ps[4]。美国Symmitricom的TSC4402用于微波双向时间传递,误差约为600ps,主要用于通信测量。
2)电缆时延误差
一般微波天线和Modem之间连接的通信电缆十米或几十米不等,其延迟也需要精确测定[5]。可以用时间间隔计数器在常温(25℃)下测量出整条电缆的延迟,并把这个值作为标称值。由于温度变化对长电缆的延迟影响较为明显,可以通过实验在不同的温度下,用时间间隔计数器测出对应的延迟,确定电缆的温度系数,以便了解到电缆的精确延迟。
3)发射和接收系统随气象变化的误差
发射和接收系统暴露于室外,温度对设备误差的影响较大[6]。为了精确测定设备时延与气象因素的关系,国内外学者做了大量的试验。中国科学院授时中心孙宏伟等人研究指出[7],户外单元(包括发射和接收系统)与温度关系最大,一般温度系数为-85ps/℃,整个温度系数为(-100±30)ps/℃[8]。美国NIST(National Institute of standards and Technology)学者们的结果是接收时延温度系数为 ( -150±10 ) ps/℃,发射时延温度系数为 ( -50±10 ) ps/℃,整个温度系数为 ( -100±30 ) ps/℃,该项误差可通过温度控制和对数据的温度补偿得到降低。
电缆时延和发射接收系统随气象的变化误差能够事先测定并加以扣除,其误差一般在0.2ns~0.5ns之间[9]。
2.3 信号空间传播路径上的误差
信号空间传播路径上的误差,主要是空间大气折射率引起的时延。目前国际上空间大气对流层时延修正误差主要使用的是数学经验模型。常见的代表模型是Hopfield模型和Saastamoinen模型。德国D.Piester 博士2007年由MPM模型计算的PTB-NICK链路的对流层与频率有关延迟最大值约为4ps[10]。对流层的误差修正还可以采用Marini模型来消除或减弱。但实际受温度、湿度、大气压强、雨、雪、雷、电等多因素影响,误差远远超出理论推算,需要经过实际测量、大量的数据统计分析,得出估计值,该项误差不属于系统误差,不可修正。
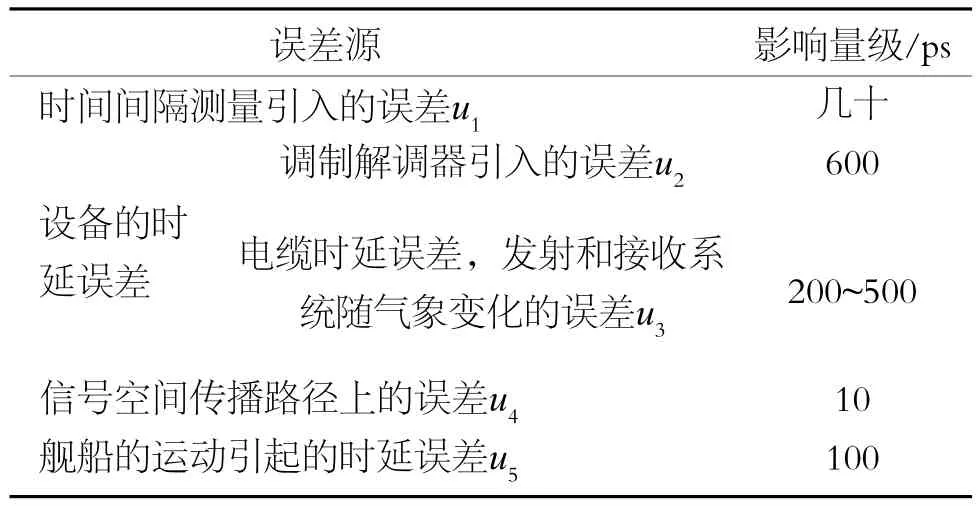
表1 各项误差来源对微波双向时间同步精度的影响Table 1 Effect of various error sources on microwave bidirectional time synchronization accuracy
2.4 信号在传播过程中舰船运动引起的时延误差
舰船在海面航行时,由于舰船的运动,引起信号时延误差,国内学者做了理论分析[11],舰船运动引起时延误差在0.1ns之内。
表1列出了以上分析的各项误差来源对微波双向时间同步精度的影响。
由以上分析可知,影响微波双向时间同步精度的主要误差源为调制解调器误差、电缆时延误差、发射和接收系统随气象变化的误差、时间间隔测量误差。其中,调制解调器引入的误差,可以通过提高调制解调器性能得到降低,电缆时延误差能够事先测定并加以扣除,发射接收系统随气象的变化误差可通过温度控制和对数据的温度补偿得到降低,时间间隔测量误差可以通过研究高精度时间间隔测量方法和硬件设备实现降低。通过理论分析、计算,舰载微波双向时间同步精度可达到1ns。
3 结束语
综上分析,基于微波双向时间传递的海面舰船编队的时间同步精度在纳秒量级,该理论分析、计算为今后建立海面运动舰船之间的时间同步系统提供理论依据。
