基于NB-IOT的城市道路停车管理系统
2019-01-08叶竞成钱其沛李逸辰
叶竞成 钱其沛 李逸辰
摘要:我国的停车管理系统目前已初具规模,但在道路停车方面却缺乏一套系统化的管理方案,致使我国道路停车呈现停车难、停车乱、收费散漫的情况。针对当今城市道路停车强安全、易操作、高效率的要求,文中介绍了基于NB-IOT的城市道路停车管理系统。该系统结合NB-IOT低功耗通信、图像处理技术和云端数据平台,为有效管理城市道路停车提供了可能。
关键词:NB-IOT;道路停车;停车系统
中图分类号:TP227 文献标识码:A 文章编号:1007-9416(2019)10-0130-02
0 引言
目前,城市停车难已成为常态痛点。据国家统计局数据显示,2018年在全国范围内的民用汽车保有量达到23231.19万辆,比上年末增长11.12%,其中私人汽车保有量20574.93万辆,增长11.13%。[1]虽然国际通行的车与车位的比例为1:1.2,然而中国大多数城市的汽车保有率只有国外的三分之一[2]。
基于以上现状,我国开始大力发展智能停车管理系统。然而,近阶段不断投入使用的停车管理系统只适用于地下停车场、露天停车场等地,对于城市道路兩侧停车却没有一个切实可行、有效的方案。为解决上述问题,本文研发了一款城市道路停车管理系统。在此系统中,为降低成本,取代传统地磁系统,采用摄像头动态提取车牌信息;针对GPRS信号在停车场信号弱,车位获取存在盲点等问题,通过利用NB-IOT技术来获取实时车位信息;最后通过通信企业的物联网平台渠道将车位信息汇聚在云平台,形成各路边停车场的实时停车信息,使道理管理方可以在不进行停杆的情况下掌握车辆的停车情况。
1 系统总体框架
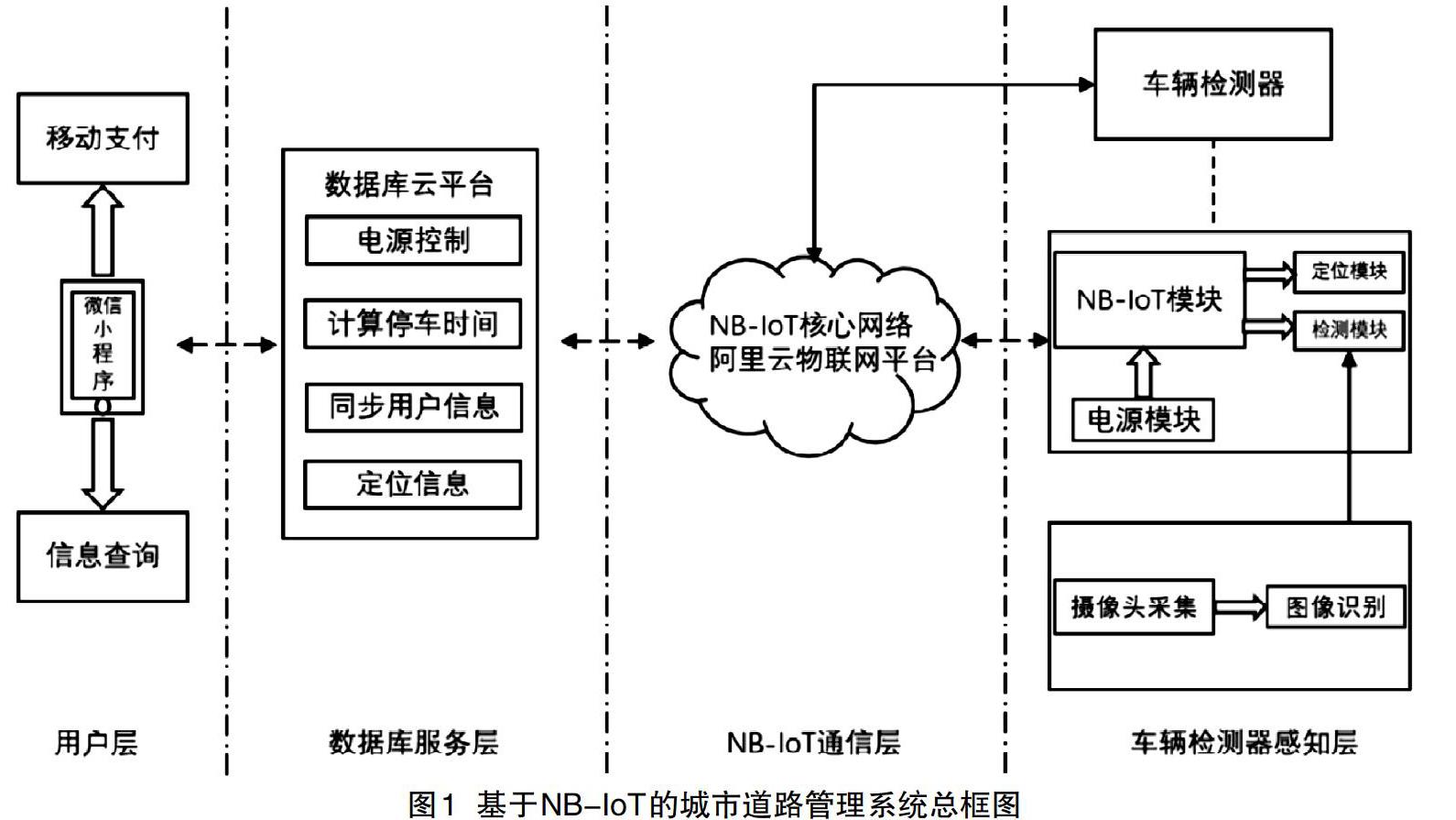
基于NB-IOT的城市道路停车管理系统可以分为三部分:第一部分为以STM32单片机为主的硬件模块。通过STM32单片机的BC28物联网集成模块的nb-iot模块及北斗GPS模块,通过电信云(华为云)进行了在线的profile开发,利用MQTT协议同阿里云搭建交互平台作为程序的云服务器;第二部分为智能摄像技术为核心的图像识别模块,采用python编译的图像识别技术,对图像进行采集、预处理之后,通过车牌定位、字符分割、字符识别等技术,最终输出车牌号[3];第三部分利用HTML5+CSS+Java等组合方式编写了微信小程序。系统框图如图1所示。
此系统主要采用在路口设置检测器对车牌进行识别,记录时间后通过对比来确定最终的停车时间,从而完成无需停车,智能的获取所有车辆的停车信息。
2 硬件模块
2.1 窄带物联网
NB-IoT是华为在2014年提出的窄带技术,又被称为窄带物联网(Narrow Band-Internet of Things)技术,也被称为低功耗广域网(LPWAN)。该技术被广泛运用于世界各地,具有覆盖广、连接多、速率快、成本低、功耗低、架构优等特点[4]。该技术可采取的带内、保护带及独立载波3种部署方式,与现有网络共存,推动全球移动通信网络或LTE网络的部署连接,促进平滑升级目标的顺利实现。由于车位在道路两旁部署,要求具有较大的并发量以及较低的功耗与成本,以适用于车位信息的实时获取,因此系统采用NB-IoT作为系统通信模块[5-6]。
2.2 GPS模块
GPS模块主要作用在于可以为车辆检测器提供远程的定位信息,从而确定每个车辆检测器获取到信息的地理位置,以此确定车辆在城市中的哪条道路上停车。
本系统采用的是SIRF三代芯片组的GPS模块,其主要特点在于总体灵敏度较高,缩短了定位时间,同时也帮助系统快速的进入了定位状态。
3 图像识别模块
3.1 车牌图像预处理
为了对车辆图像的预处理,必须将车辆图像提取出来,而后进行灰度化和去噪,这样可以提高图像质量。由于噪声是随机出现的,故而要保留车牌的纹理和颜色信息,并适当加强。最后再去除可能影响牌照区域纹理和颜色的噪点,加快图像的处理速度[7]。
在处理车牌图像平滑化的过程中,我们主要采用邻域平均法,利用图像点(x,y)及其若干像素的灰度平均值来代替点(x,y)的灰度值。微分法则是车牌图像锐化的主要处理方法。要用微分法处理图像锐化,就要使用梯度算子[8]。在这里我们使用计算量小、对细节反应敏感的Roberts边缘检测算子,这是一种利用局部差分提供边缘候选点的算子,可以给出较细边缘。用如下卷积模板表示:
3.2 车牌的矫正
由于车辆的动态行驶以及拍摄角度的不确定,截取的车牌图像常常出现倾斜。为解决这种情况,可以运用运用Radon积分变换计算车牌的倾斜角度,从断层扫描的剖面图重建出投影前的函数,以获得高质量的车牌图像,沿θ方向的Radon变换定义如下[9]:
3.3 车牌图像的识别
车牌图像的字符识别有很多方法,如模板匹配法、神经网络方法、模式识别等。对车牌图像上的字符识别,本文采用BP神经网络的方法。对于车牌字符,因为1和I、0和O是一样的,所以数字加字母一共34类,其中每类有200个样本图像,共34*200个训练样本。最终我们设计一个3层的神经网络,输入层有48个结点,隐藏层也为48个结点,输出层为34个结点。经过一定次数的迭代,可以获得较好结果。
4 结语
本文分三个部分对整个停车系统进行了全面的描述。第一部分对系统的整体框架进行了介绍,主要包括数据层,用户层,通信层和感知层,第二部分对车辆检测器中的主要硬件进行介绍,最后则是作中介绍了图像识别模块的主要技术及功能。
参考文献
[1] 国家统计局.中华人民共和国2017年国民经济和社会发展统计公报[R].2017.
[2] 徐敬海,杨燕,邓民宪,等.基于GIS的地震灾情速报与快速判定[J].自然灾害学报,2010,19(04):141-146.
[3] 梁英波,张利红.基于多尺度数学形态学梯度的图像检测[J].周口师范学院学报,2012,29(5):60-62.
[4] 戴博,袁弋,余媛芳.窄带物联网NB-IoT标准与关键技术[M].北京:人民邮电出版社,2016.
[5] 张建国.中国移动NB-IoT部署策略研究[J].移动通信,2017,41(1):25-30.
[6] WANG Y P E,LIN X Q,ADHIKARY A,et al.A primer on 3GPP narrowband Internet of Things(NB-IoT)[J].IEEE Communications Magazine,2017,55(3):117-123.
[7] 赵金帅,丁新慧,李雪霞.一种用于去除图像椒盐噪声的滤波算法[J].周口师范学院学报,2011,28(5):85-87.
[8] 谢凤英.数字图像处理及应用[M].北京:电子工业出版社,2014.
[9] 黎洪龙.基于图像处理技术的车牌识别方法研究[J].科技与创新,2017(19):65-66.
