基于simulink的模糊自适应PID三闭环控制设计及仿真
2019-01-08赵潮刘家国唐煜
赵潮 刘家国 唐煜
摘要:针对普通PID三闭环控制容易发生超调、且在负载变化或外加扰动的情况下无法实现对伺服电机精确控制的缺点,本研究提出了将普通PID三闭环控制中的位置环PID控制器用模糊自适应PID控制器替代的模糊自适应PID三闭环控制方法,并在Matlab的Simulink模块中搭建了模糊自适应PID三闭环控制模型,通过施加不同的阶跃信号,发现随着阶跃信号幅值的增加,普通PID三闭环控制调节时间增加,超调量增加,且阶跃信号超过20°时系统发生震荡,而模糊自适应PID三闭环控制调节时间基本不变,超调量为0,在同样的阶跃信号激励下系统不会震荡。通过仿真实验得到模糊自适应PID三闭环控制方法具有超调量小、调节时间稳定、鲁棒性较强的优点。
关键词:模糊控制;三闭环;simulink仿真
中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2019)10-0001-04
0 引言
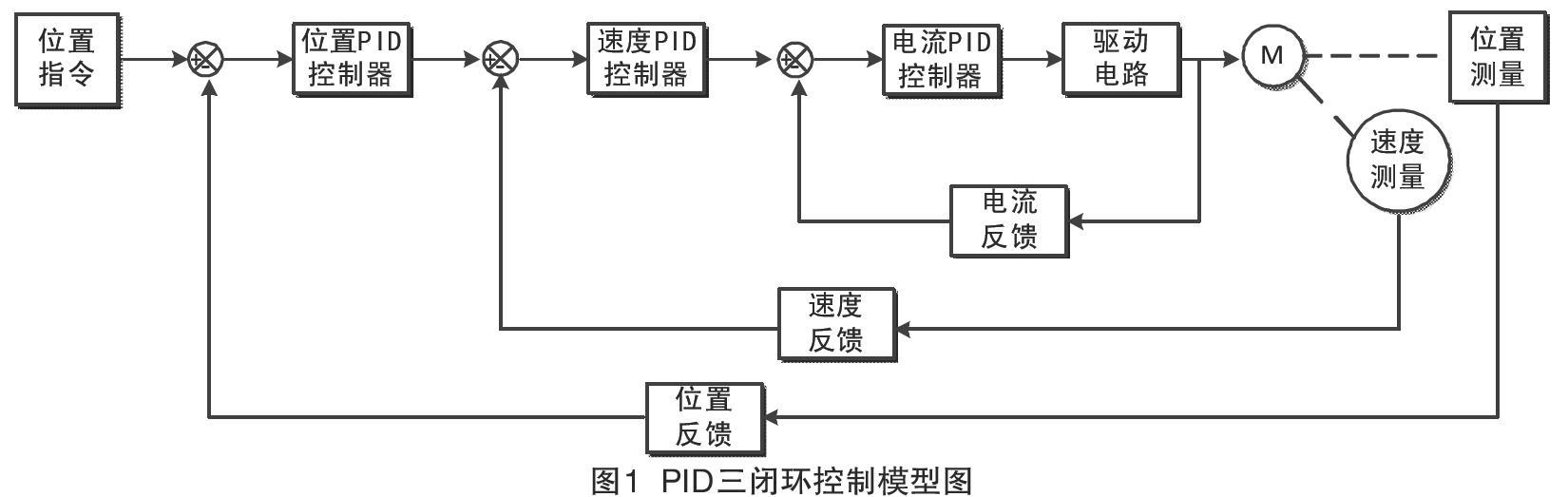
PID控制是目前应用于装备控制和自动化生产中一种比较成熟的控制方法,其具有算法相对简单、稳定性高和鲁棒性好的优点 [1]。随着工业技术的发展对伺服电机的控制精度要求也在不断提高,单个PID控制器很难满足高精度的指标,目前常采用PID三闭环控制方法,即位置环、速度环、电流环组成的三环负反馈PID控制系统[2],PID三闭环控制模型如图1所示。其中内环是电流环,电流环为控制伺服电机输入电流大小的闭环回路,通过检测驱动器的输出电流值对设定电流进行调节,使得伺服电机的输入电流尽量接近设定电流;中间环是速度环,通过检测伺服电机编码器的速度反馈信号进行速度调节,速度环输出为电流环的设定,速度环的控制包含电流环控制;最外环为位置环,通过检测码盘位置信息进行位置控制,其输出为速度环的设定,在位置控制的同时进行速度和电流的控制[3-4]。
在使用PID三闭环控制方式控制伺服电机的过程中,需要对电流、速度、位置三环的PID参数依次进行调节,获得每个环中kp、ki、kd的最优值。在实际调试中,由于三个PID控制器存在相互影响,需要调试人员具有较为丰富的经验,不断进行试验,以得到最优参数[5]。当参数选择不合适时,系统容易发生超调现象,当一组最优PID参数选定后,负载变化或外部施加扰动时,伺服电机控制精度会迅速降低。针对PID三闭环控制的缺点,本研究提出了基于模糊控制原理的模糊自适应PID三闭环控制方法。
1 模糊自适应PID三闭环控制方法设计
模糊自适应PID控制以普通PID控制為基础,运用模糊数学的理论及方法,根据现有的工程经验,将相关运算规则用模糊集合表示,把模糊化后的控制规则作为先验知识储存于数据库中,然后根据系统输入信号的变化情况,计算机进行相应的模糊推理,实现对PID参数的自整定调整[6-8]。
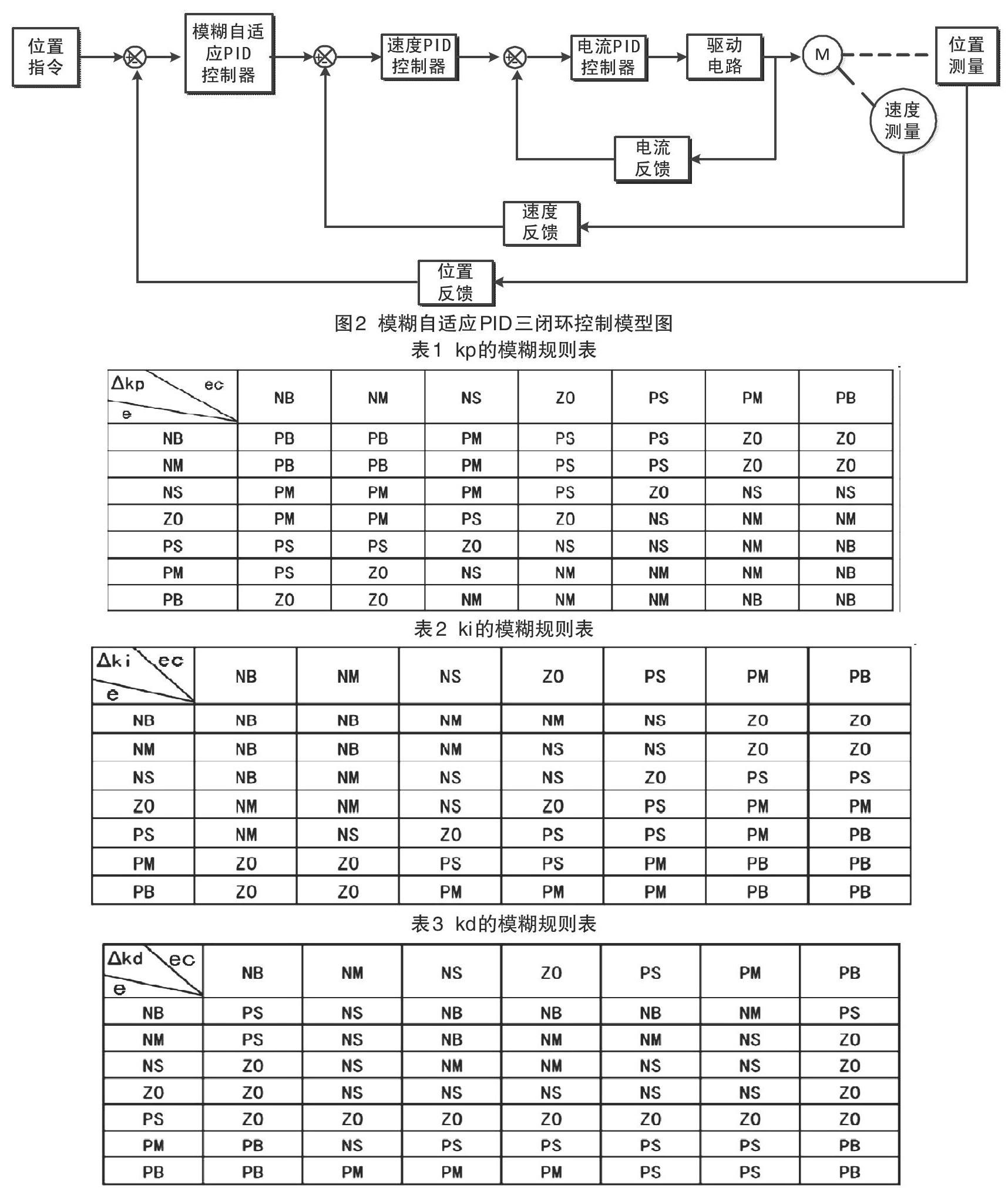
在PID三闭环控制中,位置环反馈信号取自电机编码器或外部码盘,位置控制环输出为速度环的设定,在位置环控制模式下系统进行了电流、速度、位置三个环的运算,因此位置环PID控制器性能好坏很大程度上决定了PID三闭环控制的精度 [9]。本研究采取了将普通PID三闭环控制中的位置环PID控制器用模糊自适应PID控制器替代,通过位置环的模糊自适应PID控制器,实时对位置环PID参数进行调整,模糊自适应PID三闭环控制模型图如图2。
2 模糊自适应PID控制器设计
模糊自适应PID控制器采用两输入三输出模式,以误差e和误差变化率ec作为输入信号,PID参数kp、ki、kd作为输出[10]。根据之前的技术知识和经验,将模糊子集设为{NB,NM,NS,ZO,PS,PM,PB},模糊集中的元素代表偏差的大小,其中NB代表负大、NM代表负中,NS代表负小、ZO代表零、PS代表正小、PM代表正中、PB代表正大[11-12]。 e、ec的论域是[-3,3],kp、ki、kd的论域分别为[-0.3,0.3]、[-0.06, 0.06]、[-0.06,0.06],隶属函数均为trimf 函数。建立如下kp、ki、kd三个参数的自整定模糊控制规则表,如表1、表2、表3所示。
3 系统仿真及分析
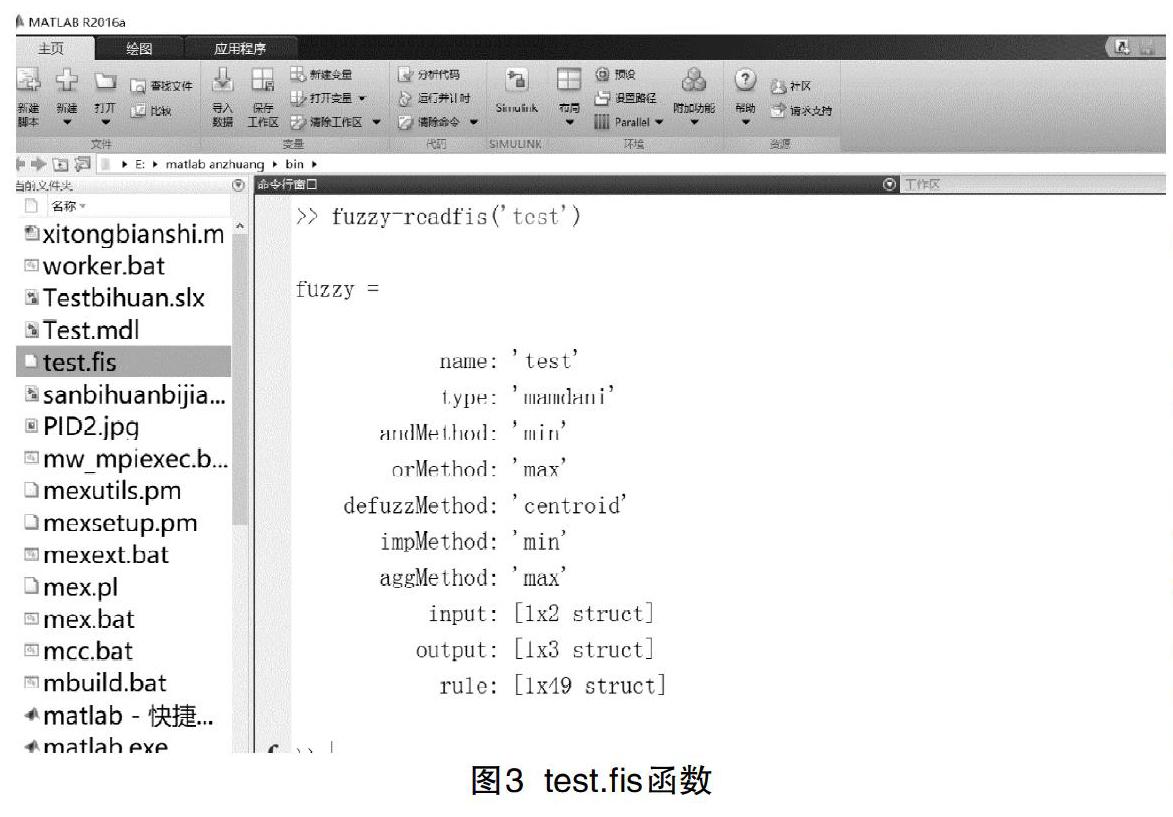
首先在matlab命令窗口中输入fuzzy,打开fis功能编辑器,构建如图3的test.fis函数。
然后在matlab的simulink模块中,建立模糊自适应PID控制器,模糊控制器Fuzzy logic Controller调用模糊规则test.fis函数,kp、ki、kd的初始值分别设为0.001、0.001、5,并对模糊控制器进行封装,In1为输入,Out1为输出,模糊自适应PID控制器simulink仿真模型图如图4,模糊自适应PID三闭环控制simulink仿真模型图如图5所示。
模糊自适应PID三闭环控制simulink仿真模型构建完成后,对系统施加幅值分别为5°、10°、15°、20°的阶跃信号,系统响应曲线如图6。
根据图6,PID三闭环控制调节时间分别为2.5ms、3.1ms、7.3ms和9.8ms,超调量为2.2%、4.1%、6.7%、45.2%,模糊自适应PID三闭环控制调节时间为10.1ms、11.3ms、10.8ms、9.8ms,超调量均为0。
可见随着阶跃信号幅值的增加,PID三闭环控制调节时间变长,超调量不断增加,在20°的阶跃信号下系统发生震荡;而模糊自适应PID三闭环控制调节时间基本不变,没有超调,且在同样的阶跃信号下不发生震荡。
4 结语
本研究提出了一种模糊自适应PID三闭环控制的设计方法,将传统PID三闭环控制中的位置环PID控制器用模糊自适应PID控制器替代,并在Matlab的Simulink模块中搭建了传统PID三闭环控制和模糊自适应PID三闭环控制两种控制模型,通过对模型施加不同的阶跃信号,发现随着阶跃信号幅值的增加,普通PID三闭环控制的调节时间增加、超调量增大,当阶跃信号超过20°时系统发生震荡,而模糊自适应PID三闭环控制的调节时间基本不变,且没有超调。通过仿真实验得到模糊自适应PID三闭环控制方法具有很高的可行性,且与传统PID三闭环控制相比具有超调量小、调节时间稳定、鲁棒性较强的优点。
参考文献
[1] 黄忠霖编著.控制系统MATLAB计算及仿真[M].第2版.北京:国防工业出版社,2004.
[2] 张坤,周浩.基于提高闭环跟随特性的位置随动系统设计与仿真[J].兵器装备工程学报,2016,37(6):87-91.
[3] Andrzej Koszewnik,Kamil Troc,Maciej Sowik.PID Controllers Design Applied to Positioning of Ball on the Stewart Platform[J].Acta Mechanica et Automatica,2014,Vol.8(No.4):214-218.
[4] Wu,YM (Wu, Yanmin);Cui, GZ (Cui, Guangzhao);Zhang, XC (Zhang, Xuncai)[1].Fuzzy RBF Neural PID Control to Simulation Turntable Servo System[J].BIO-INSPIRED COMPUTING-THEORIES AND APPLICATIONS,BIC-TA 2014.2014:478-482.
[5] 張展华,桂延宁,周彬,等.基于模糊自适应的连续整定PID舵机控制器[J].探测与控制学报,2018,40(4):73-79.
[6] 傅强,樊丁.模糊自适应整定PID在航空发动机中的应用研究[J].计算机仿真,2006(3):54-57.
[7] 宋超,曹翱,温家玺.自适应模糊PID控制器的设计及MATLAB仿真[J].现代制造技术与装备,2018(7):203-205.
[8] 林国汉,李晓秀.模糊自整定PID控制器设计与仿真[J].湖南工程学院学报(自然科学版),2008(3):16-18.
[9] 张义福,马让奎,张弩天,等.浅谈伺服电机选型的原则和需要注意的问题[J].探索科学,2016(4):34.
[10] 叶润玉.一种自适应模糊PID控制器的设计及应用[J].福建工程学院学报,2006,4(6):818-821.
[11] 王震,崔峻豪,丁泽涛,等.水轮发电机调节系统的模糊PID控制[J].信息技术与信息化,2018(10):83-85.
[12] 曹晖,王苗苗,贾立新,等.基于模糊自调整和采样模糊控制的磨机负荷控制策略[J].中南大学学报(自然科学版),2013,44(A1):255-259.
