基于单片机控制AGV小车设计及应用
2019-01-08闫书燕
闫书燕
(谢菲尔德大学机械工程系,英国 S102TN)
铁路机车是铁路运输业发展的基础和支柱,按时提供大量工作状态良好的机车是机务部门的基本任务,是维持铁路运输生产秩序的基本保障。然而,当机车使用一段时间后,发生零部件磨损变形或是由于材料性质而表现出的金属疲劳现象,都会成为机车发生危险事故的诱因。因此在铁路机车定期检修制度中,以机车安全预防为目的的定期检查和专业化、集中化维修是十分必要的[1]。但是,在铁路机车常规检修过程中,经常带来很多问题,诸如投入劳动力多、耗时长和容易发生人身伤害事故等。自动导引车(Automated Guided Vehicle,简称AGV小车)属于一种无人驾驶小车,因为其在现代物流搬运装备中具有的高度自动化和智能化等特点,受到交通运输业越来越多的重视[2-3]。铁路检修部门应用AGV小车作为一种智能搬运零配件的自动化运输工具,具有节能、环保和柔性运输能特点,能够提高工作效率、降低工作成本,具有很高的使用价值和市场优势。
1 AGV小车的定义和分类
1.1 AGV小车的定义
AGV小车作为无人自动导引运输车,集合声、光、电、计算机技术于一体,应用了自控理论和机器人技术,装配有电磁或光学等自动性导引装置,能够按照使用人员设定好的导引路径行驶,具备完成目标识别、避让障碍物和各种移载功能,同时具有自我安全保护的应急能力[4-5]。
AGV小车一般由导向模块、行走模块、导向传感器、微处理器、通讯装置、移载装置和蓄电池等构成。微处理器是控制核心,把小车各部分有机联系在一起,通过通讯系统接收地面管理站传来的各种指令,同时不断地把小车的位置信息、运行状况等数据传回地面站,控制整车的运行[6]。AGV小车首先要根据模拟工作地图进行编程,然后按照预定程序完成行走轨迹,当传感器检测出的位置信号超出预定轨迹位置时,数字编码器把相应的电压信号送给控制器,由控制器根据位置偏差信号调整电机转速,进行纠正偏差,从而实现AGV小车行走系统的实时控制。
1.2 AGV小车的分类
AGV小车根据用途和结构分类,包括辊道移载、推挽移载和叉式移载搬运型等[7]。辊道移载搬运型AGV,是通过自身辊道与地面站台辊道对接之后实现装卸货物,AGV可准确停靠在地面站台侧面,AGV和站台上的辊道对接无误后,两者的输送机同时驱动,同步传动完成物料移载。辊筒输送机的驱动方式是通过在AGV上安装辊筒输送机和摩擦辊筒,在地面上设置无动力辊筒输送机。此类AGV小车可左、右双向装卸托盘货物,作业效率高、安全性好,缺点是站台需要有连锁信号和动力传动,常用于可滚动式托盘或大型木箱、板材、集装箱等重载物料的移载搬运;推挽移载搬运型AGV是通过自身推挽机构的伸缩推拉,实现货台货物的装运卸过程。AGV作业时停靠在货台一侧,通过推挽机构侧向移动臂的推拉完成装卸货物,地面货台不需要动力传动,特别适合于同高度站台之间的搬运场合。由于作业点定位精度要求高,故此类AGV小车常用于平面托盘和规则物料的搬运;叉式移载搬运型AGV,通过倒车完成移载,托盘存放时必须与地面有一定高度,以保证货叉和下方的两个支腿同时进入实现搬运任务,此类AGV可承担空托盘、带载托盘、纸卷等升降搬运工作,能适应从地面到不同高度范围货架的运输作业场合[8-9]。
1.3 AGV小车的激光导航技术
导航技术是衡量AGV小车技术水平的重要标志。传统导航方式以电磁导航和磁带导航为主,适用于简单的工作环境,使用物理路径,无需地图创建和目标识别技术。当前,随着激光传感器、图像传感器开始应用到AGV小车中,激光雷达导航技术得到成功推广[10]。激光导航与传统导航方式相比较,具有定位精度高、路径柔度高,无需对地面进行改造等诸多优点。首先,不需要创建物理路径,AGV小车通过激光雷达采集环境数据,通过处理后与预先创建好的环境地图进行比对获得位置信息,即作为定位信息。其次,激光导航使用的工作地图具有明显测度信息,其精确度会影响AGV小车的自身定位精确度,AGV小车可通过激光自动地创建精确地图,与人力绘制地图信息相比,节省了大量人力和时间。最后,激光导航可以通过环境感知技术,从大量环境数据中,提取和构建更高层次环境信息,作为地图创建与目标定位的基础,提升AGV小车的智能性。
2 AGV小车的设计
2.1 AGV小车控制系统的设计
结合以上技术和功能特点,设计一种单片机AGV小车用于铁路机车维修,按照预先设定的地图路线行驶,能够完成小车的直行、倒退、转弯和停止等连贯动作,同时具备目标识别、故障暂停等功能,AGV小车控制系统示意图,如图1所示。

图1 AGV小车控制系统示意图
系统使用AT89C51单片机作为核心控制器,数字编码器在电机运转时发出的脉冲信号,经过脉冲鉴向电路,向电机传发方向信号;来自鉴向电路的正反方向脉冲信号进入到两块8253计数器进行计数,以获得电机的旋转速度和位移;经过AT89C51单片机控制程序的运算比较后,输出的控制量经过两块DAC1208数模转换器变成模拟量,输出到两块UC3637直流电动机脉宽调制器,通过H桥开关放大器,作为执行机构的速度或者位移给定值,从而控制电机A和B的运转,带动AGV小车完成动作任务。
2.2 AGV小车的机械设计
AGV小车主要由机械和电气两部分组成。如图2和图3所示,机械部分包括车架、车轮、执行机构、固定板、电机、驱动器、驱动轮装置、从动轮装置、蓄电池、运动控制器和电源保险杠和充电连接器等。

图2 AGV小车总体模型
执行机构安装在小车主体的下方,用于驱动AGV小车运行,包括分别设置在左侧和右侧的固定板、左执行机构和右执行机构;驱动机构包括车轮、马达、驱动器和旋转编码器,车轮主轴与马达主轴连接,左执行机构中的车轮和右执行机构中的车轮产生速度差,促使执行机构转弯;马达与驱动器电连接,驱动器与下位机系统电连接,驱动器用于控制马达运转;旋转编码器的输入轴与马达的主轴连接,并且与下位机系统连接,向下位机反馈马达的转速和转角数据[11]。

图3 AGV小车驱动系统
2.3 AGV小车的电气设计
AGV小车的电气部分包括激光扫描仪、角度传感器、旋转编码器、上位机系统、下位机系统、执行机构、输入输出装置、触摸屏、无线电台和电源等。AGV小车电气控制原理,如图4所示,激光扫描仪与上位机系统连接,当接收反射激光信号后转换为电信号,传送给上位机系统;上位机系统接收到扫描仪的信号后构建工厂模拟地图,并进行轨迹路径规划;上位机与下位机电连接,与之发送控制指令;输入输出装置与下位机系统连接,输入装置用于接收操作人员发送的控制指令,而输出装置显示AGV小车的工作状态信息,输入装置包括按钮、遥控器和触摸屏,输出装置包括声音输出设备和障碍物传感器,分别与下位机系统电连接。按钮用于开闭AGV小车,声音输出设备用于提示运行工作状态,障碍物传感器用于AGV小车的避障报警,遥控器与上位机系统、下位机系统无线连接,用于工人手动远距离操控AGV小车。

图4 AGV小车电气控制原理图
3 AGV小车的应用
3.1 AGV小车在工业环境中的应用
AGV小车在工业环境下的具体操作程序如图5所示,首先通过遥控器设定遥控模式,在手动遥控操作下控制AGV小车在既定工作区域演戏运行一次,在此过程中,AGV小车上的激光扫描仪连续向外界环境发出激光,经过四周墙体或者区域内障碍物反射回来后转换为电信号,上传至上位机系统,上位机接收到电信号后,计算由发射激光到接受到反射激光的时间,以及发送激光的角度信息,由此推算出物体距AGV小车的距离和角度位置信息;当AGV小车初次运行完工作车间的全部区域后,上位机系统根据上述信息建立绘制工作场地的初始地图,随后操作人员可对原始地图进行设定,得到安全运行地图,如图6所示。
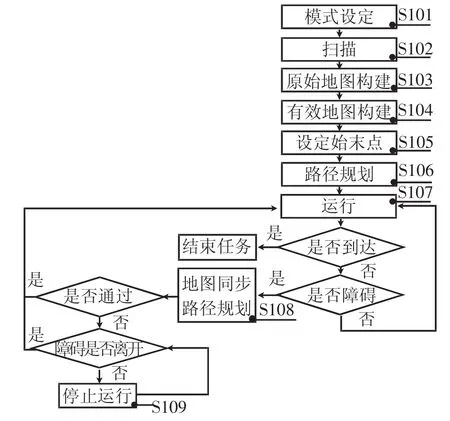
图5 AGV小车行动操作流程图
AGV小车在安全运行地图中设定为自主运行模式,当操作工人在车间通过电脑发送料单到配料车间,配料车间控制平台得到指令后,下发指令给配料机,配料机开始配料,同时AGV管理系统根据配料单指派AGV小车到配料位接料;当系统设定起始点和目标点后,上位机根据地图进行路径规划得到最佳路径,并发送控制指令至AGV小车的执行机构,从而控制AGV小车的运行送料。在此期间,旋转编码器将通过下位机向上位机传送转速等数据,从而实现对执行机构的反馈控制,进一步调整执行机构中车轮的转速,直至到达设定的目的地[12-13]。

图6 AGV小车模拟行动地图
3.2 应用特点
经过对AGV小车现场工作情况的跟踪与测验,总结了设计经验和问题,为后续改进AGV小车提供依据。
3.2.1 优点
1)设计的灵活性。通过修改AGV小车导向程序,就可以改变、修正或扩充小车的移动路线。如果改变固定的传送带运输线或有轨小车的轨道,相比之下改造的工作量要大很多。
2)能实时监控及控制。由于控制平台能够对AGV进行实时监视,如果工厂车间要求改变进度表或作业计划,则可以重新计算小车路线。此外,还可以添加紧急服务,向计算机报告负载失效、零件错放等事故。如果采用无线电控制,可以实现AGV和计算机之间的双向通讯。
3)更加安全可靠。AGV具有智能控制单元,同工作区域的控制器通讯,采取了多级保护措施,具体分为软件保护和硬件保护。当发生运动异常、位置丢失、偏离导航线路通讯故障等问题时,软件保护系统启动自我解决模式;硬件保护设置有状态提示、故障提示、运行提示等,例如设置有非接触式激光防碰感应器,在车身四周安装有保险杠,并且设有应急停开关,可以防止小车相互碰撞;AGV安装定位精度传感器,可保证定位精度达到±300 mm,在良好环境下最高可达到±30 mm,从而避免了发生碰撞和工件卡死等现象[8]。
3.2.2 存在的问题及改进措施
1)必须有定位参照物。AVG小车在长距离、大面积场景或者无参考物环境下会定位失效;在室外运行且有强风情况下,工作路径旁花草或其他杂物的随风运动会导致定位不准确而迷路。需要加强激光定位准确度,引进远距离(80 m以上)激光扫描测距系统[6]。
2)高温环境下易失控。AGV小车中电子元器件的工作温度为-10℃~50℃,相对湿度≤80%;在夏天的高温环境下,室外地表温度达到60℃,高温导致部分电子元件失灵,使AGV小车发生急停、启动按钮失控等现象[8]。建议更换耐高温元器件,或者加装散热装置。
3)恶劣路况下会自行停机。AGV小车未对过轨道功能做专门设计,而实际工作情况下,由于为方便铁路机车运输便利,工作车间的运行路线分布有20余处横跨路面的机车轨道(轨道槽宽90 mm、槽深70 mm),当AGV小车经过轨道时,伴随颠簸、卡车轮等现象及由此带来的瞬间过电流会熔断电源保险丝。可以替换橡胶轮或履带式车轮,或者重新设计和装配大直径车轮。
4 结论
本文以无人驾驶自主移动导引车(AGV)为研究对象,在调查和分析了铁路机车维修用AGV小车原理和类型的基础上,设计了一种基于单片机控制AGV小车,包括车体机械部分和电气部分的设计,并且应用到实践环境中,能够按照预先设定的地图路线,完成小车的直行、倒退、转弯和停止等连贯行驶动作,同时具备目标识别和故障暂停等功能。AGV小车作为生产辅助的搬运工具,集合了声、光、电和计算机技术于一体,应用了自控理论和机器人技术,相比传统铁路导引车,AGV小车,极大程度降低了车间工人的劳动强度和安全事故发生率,提高了铁路机车维修的自动化水平和工作效率,在物流运输行业具备较大开发潜力和市场前景。