履带式越障机器人系统设计
2019-01-08王超星刘淑晶
王 枭,王超星,刘淑晶
(1.北京市大兴区第一中学,北京 102600;2.三河市职教中心,河北 三河 065200;3.北京石油化工学院 机械工程学院,北京 102617)
随着机器人技术的发展,机器人除了广泛应用于工业制造领域外,还应用于资源勘探、抢险救灾、医疗服务、军事和巡检等其他领域。巡检机器人作为一种特种设备,可以代替人工在复杂的作业环境下完成巡检作业任务。目前,主流的巡检机器人有履带式、轮式和混合式等,其中以履带式为主[1]。从20世纪80年代起,国外就对小型履带式机器人展开了系统性研究,比较有影响的是美国的PackBot[2]机器人,URBOT、NUGV和TALON[3]机器人,其中,TALON系列机器人是一种传统的小型双履带式机器人,该机器人可根据任务的不同安装不同的任务模块,主要应用于执行侦察、危险品操作和救援等领域。此外,英国研制的Supper Wheelbarrow排爆机器人、加拿大布鲁克大学研制的AZMUT机器人[4]、日本的Helios V机器人[5]都属于履带式机器人。日本东京工业大学的T.Kamegawa等提出了一种搜救机器人,该机器人由多节双履带式模块车连接而成,能够进入狭窄的空间,相邻模块之间由2个主动自由度关节连接或3个随动自由度关节连接,所以该机器人结构形式具有很好的地面适应能力和越障能力[6]。
我国对履带式机器人的研究也取得了一定的成果,如沈阳自动化研究所研制的CLMBER机器人[7]、北京理工大学研制的四履腿机器人[8]以及北京航空航天大学研制的可重构履腿机器人等。沈阳自动化研究所研制的可变形搜救机器人采用了三履带式模块化结构,该机器人可根据不同地形环境进行变形,变形出直线形、并排形和三角形等多种形状,具有较强的环境适应性[9-10]。中国矿业大学研制了我国第1台CUMT—1型机器人,该机器人能够检测井内的一氧化碳、瓦斯等有害气体体积分数,可通过摄像装置传回井内的实时图像和声音,了解生还者的健康状况,并可携带救援物资帮助生还者进行逃生和自救。今后,搜救机器人的研究方向主要朝多种技术融合化和多智能体网络化发展[11-12]。
本文通过对多种典型障碍物的物理特性进行分析,设计一款越障能力突出的履带式越障机器人(下述简称越障机器人)。首先,制定了越障机器人的整体系统方案,并搭建了越障机器人机械本体结构;其次,基于BASRA主控板搭建越障机器人控制系统,并编写控制系统程序;最后,进行了越障性能试验。
1 越障机器人系统方案设计
常见的障碍物包括栅格地形、减速带、小型阶梯、石块地形、U型隧道,凹形隧道,防滑带、柔软草地、大楼梯、窄桥和高台等。对于机器人而言,越障难度最高的是台阶式障碍物,因此本文以150 mm高度的3层台阶等垂直障碍为越障目标,对越障机器人进行设计及分析。
越障机器人基于BASRA主控板及BigFish扩展版控制算法进行相应路线运行,利用灰度传感器对黑色路线的检测进行循迹。越障机器人前端分布3个传感器,在前进过程中分别根据传感器采集的不同信息,对其姿态进行实时调整;同时,其前端有舵机及碰撞传感器,当遇到障碍时,触发碰撞传感器,通过控制舵机来实现越障机器人的越障。
越障机器人的系统结构图如图1所示,主要分为主控系统、驱动系统、安全系统、检测系统、通信系统和供电系统等6个部分。
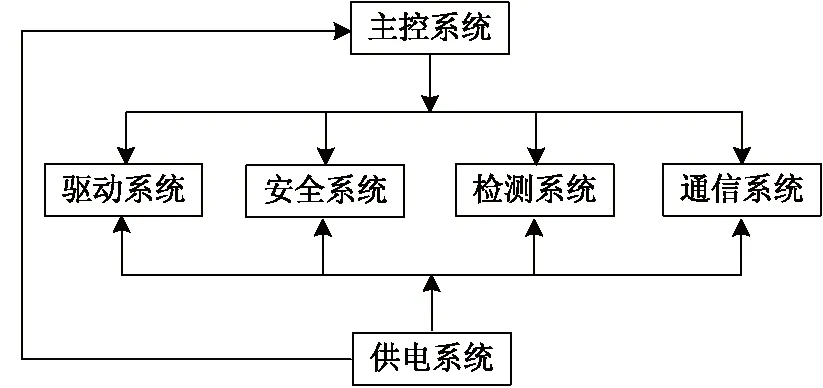
图1 系统结构图
2 越障机器人机械本体设计
从设计角度的简便性、稳定性及可靠性出发,结合功能要求,完成履带式越障机器人的结构设计,其结构简图如图2所示。越障机器人的外形尺寸为290 mm×172 mm×135 mm(长×宽×高),履带轮中心距为150 mm。
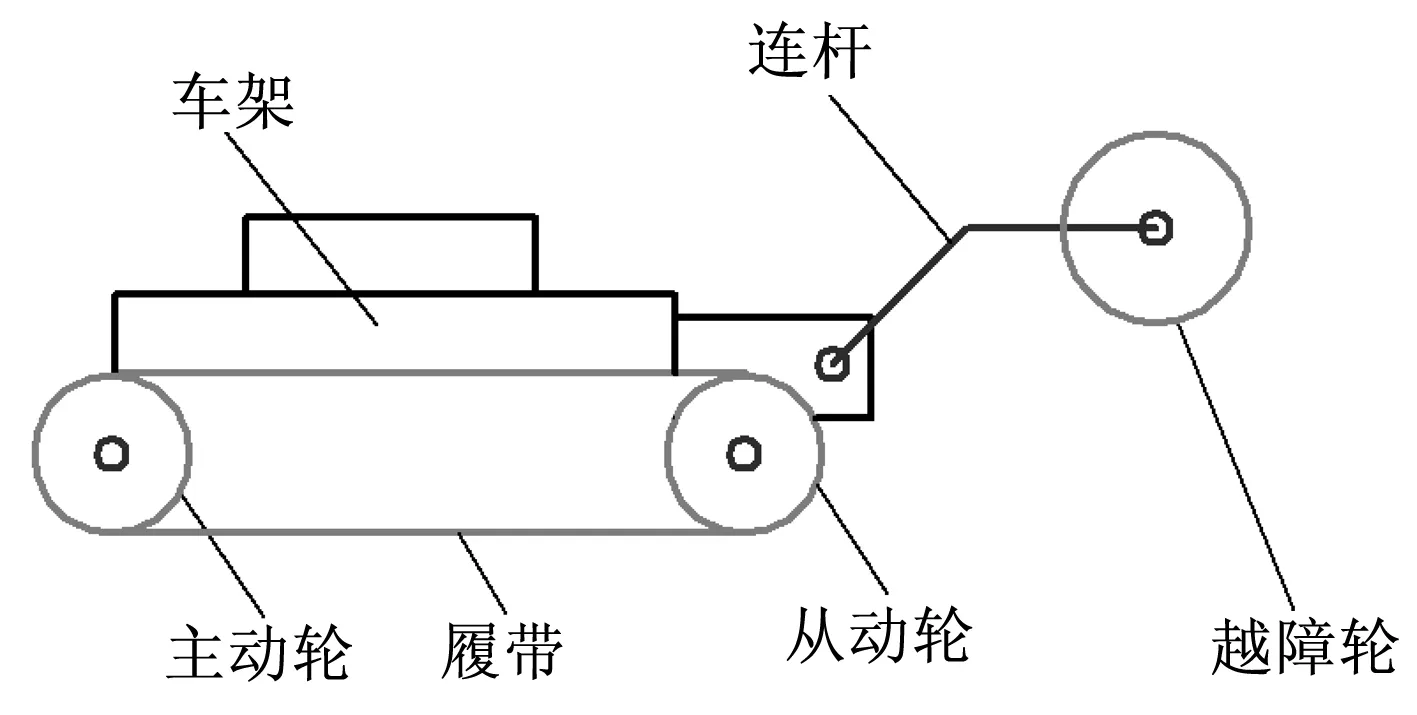
图2 越障机器人结构简图
2.1 机械结构
越障机器人的机械结构主要包括越障机构和行走机构。
越障机构主要由舵机、连杆、小轮及橡胶圈组成(见图3)。当障碍触发碰撞传感器时,电平信号使舵机旋转一定角度,并在程序中调整合适的延时时间,使小轮支承起越障机器人前端,当越过障碍时,舵机向回旋转一定角度,放平越障机器人,此时越障机器人继续向前运动。越障时,为防止小轮被障碍卡住,在小轮与连接轴间添加了套筒,在翻越障碍时,小轮可以圆滑转动;同时,为了增加小轮与障碍接触面的摩擦力,在小轮圆周添加了橡胶圈。
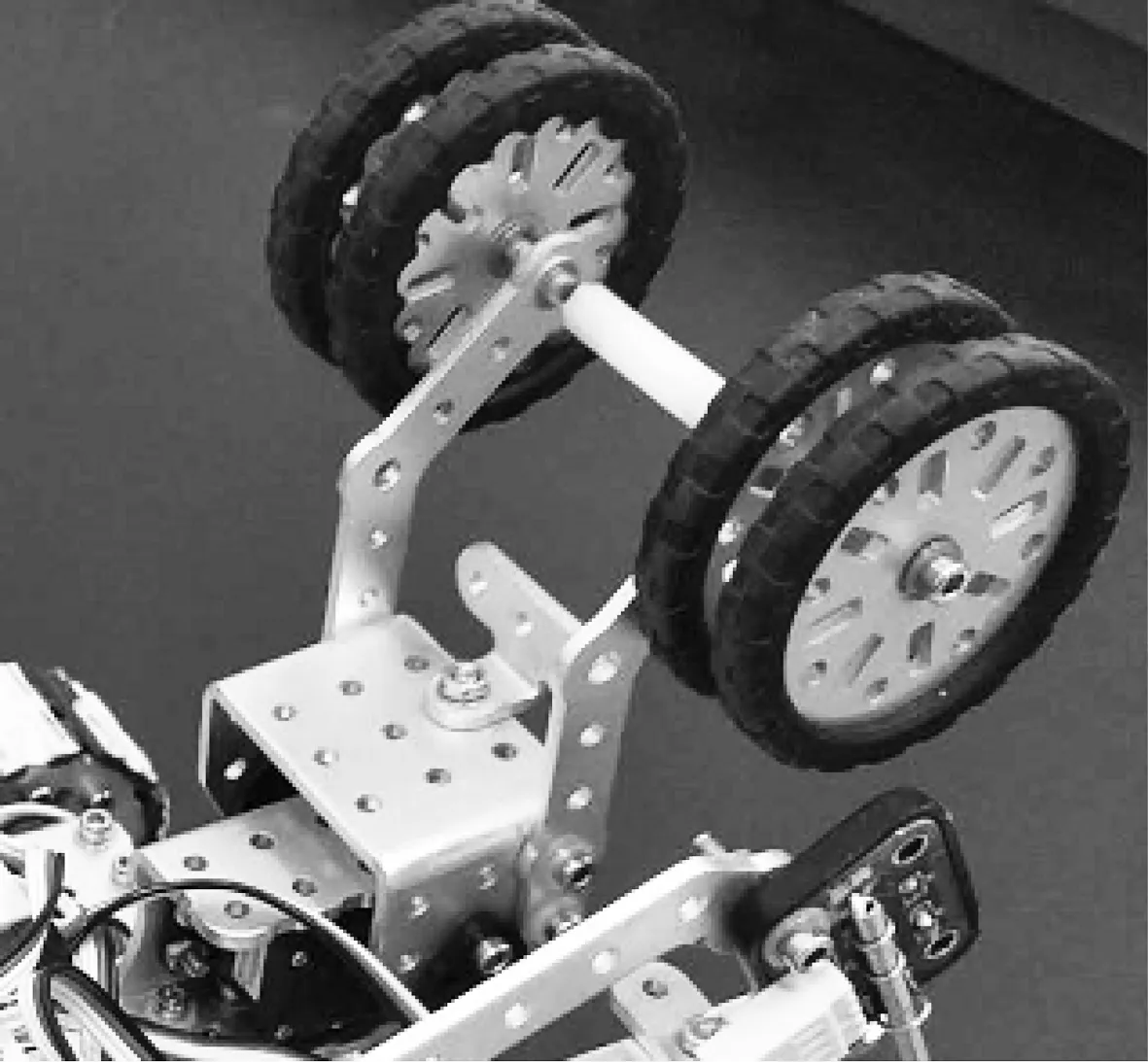
图3 越障机构
行走机构为履带式传动机构(见图4)。这种行走机构的优点是与地面接触面积大,对地形的适应性强。越障机器人采用双履带,分别分布在机器人的两侧,其中履带行走机构的后履带轮为驱动轮,为越障机器人的行走和越障提供动力。
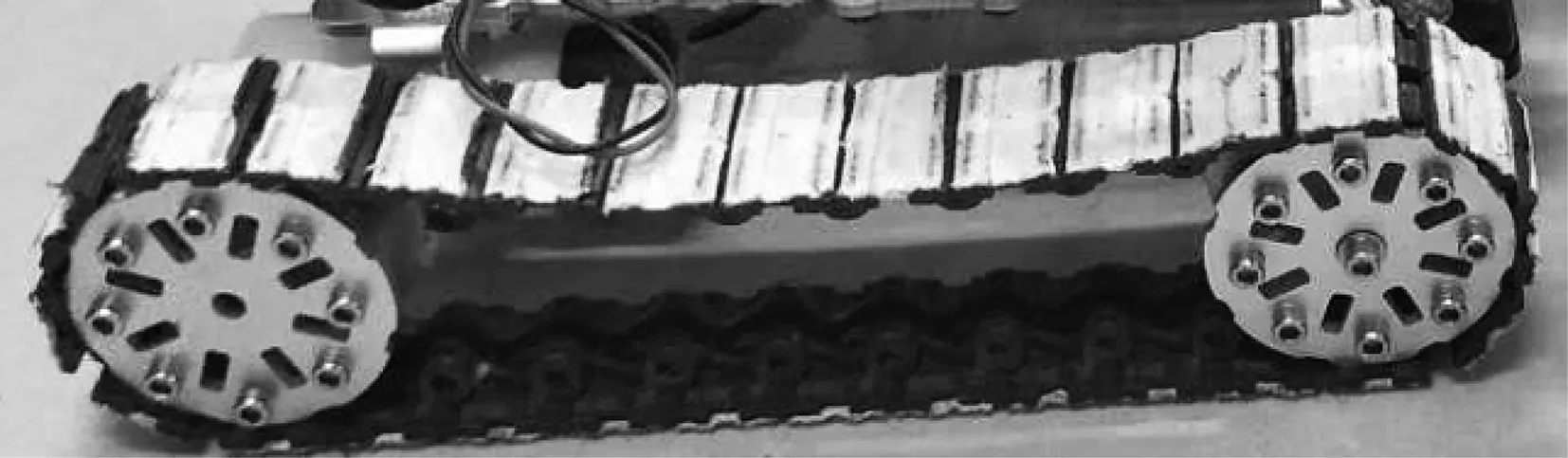
图4 履带传动机构
2.2 整体布局
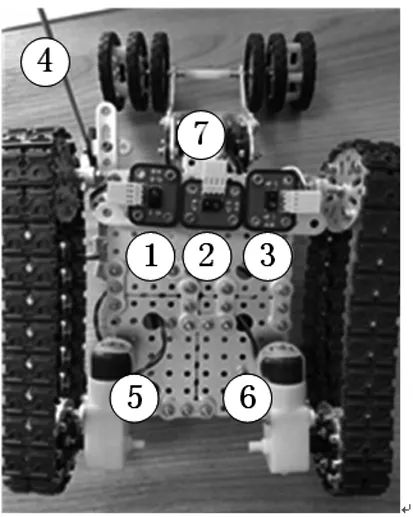
图5 越障机器人整体布局图
越障机器人采用2个直流电动机和1个舵机作为驱动电动机,采用3个灰度传感器及1个碰撞传感器。其整体布局如图5所示。图5中,①、②和③为灰度传感器,可以检测到黑线,并根据传感器检测到黑线的不同位置,实时调整机器人位姿进行巡线;④为碰撞传感器,当遇到障碍时,触发碰撞传感器,此时舵机开始工作,实施越障;⑤和⑥为2个直流电动机,分别安装在越障机器人后侧;⑦为舵机,安装在越障机器人前,并通过连接臂完成越障。电动机连接轮胎处安装履带,利用履带越障能力和地形适应能力强的特点,来完成各种地形的行驶。
3 越障机器人越障过程分析
越障机器人越障过程模型可以简化为二维平面模型(见图6)。
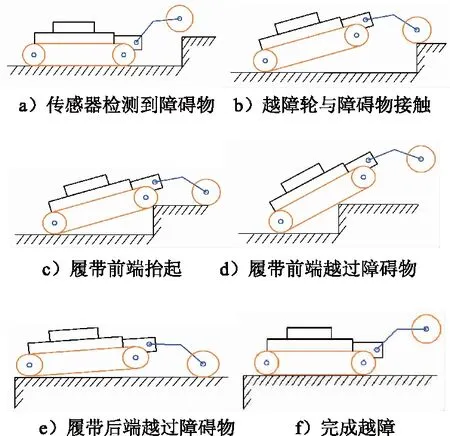
图6 越障机器人越障过程
整个越障过程可以分为如下2个阶段。
1)悬架连杆摆动,越障轮接触障碍物。当越障机器人向前行驶,传感器检测到障碍物后,电动机驱动悬架连杆顺时针摆动,连杆带动越障轮向下运动,使越障轮与障碍物表面接触(见图6a)。障碍物对越障轮有垂直于障碍物表面向上的作用力,促使越障机器人车头向上运动(见图6b)。
2)履带爬越阶段。越障机器人在电动机的驱动下继续向前行驶,履带前端与障碍物接触(见图6c)。越障机器人履带与障碍物表面产生平行履带向前的摩擦力,越障机器人继续向前行驶,履带逐渐越过障碍物(见图6d)。随着越障机器人向前行驶,当其中心越过障碍物后,越障机器人会在重力的驱动下顺时针旋转,越障轮和履带后端与地面接触(见图6e)。若越障机器人在向前行驶的过程中再一次检测到障碍物,那么将重复越障动作,否则,悬架连杆和越障轮在电动机的驱动下恢复原有姿态,向前行驶完成越障(见图6f)。
4 越障机器人控制系统设计
4.1 越障机器人控制系统电路原理图
越障机器人控制系统中硬件系统以BASRA作为主控制器,采用BifFish扩展板连接各灰度传感器、碰撞传感器以及驱动电动机。BASRA是一款基于Arduino开源方案设计的一款开发板,其处理器核心是ATmega328,可以同时控制多路输入/输出信号。BifFish扩展板扩展了伺服电动机连接口、直流电动机连接口以及一个通用扩展接口等。通过USB数据总线可以实现PC机与BASRA主控板之间的数据交换。越障机器人的电路原理图如图7所示。

图7 越障机器人电路原理图
4.2 越障机器人软件编程
控制系统软件是基于Arduino开源项目开发的,Arduino编程语言基于C/C++的混合编程,开发环境基于Wring和Processing架构,其中Wring是用于微控制器的一种开源编程架构,可以让用户编写跨平台的程序,这些代码无需修改就可以在不同的微控制器和电路板上运行,使得程序具有很高的可移植性。软件部分采用模块化的设计思想,主要是通过主程序调用各个模块的子程序来控制机器人的整体运作,每个子程序设计一个模块的动作。
软件部分包含循迹模块、转弯模块、延时模块、停止模块、越障模块以及算法部分等。其中,循迹模块贯穿了程序的始终,循迹模块是越障机器人准确而稳定地完成越障的保障,做到越障机器人不盲走、不走偏,且实时纠正;转弯模块包含左转和右转,通过两侧轮子的差速运动实现纠偏;越障模块是通过舵机来实现越障机器人的越障。
越障机器人越障流程图如图8所示。
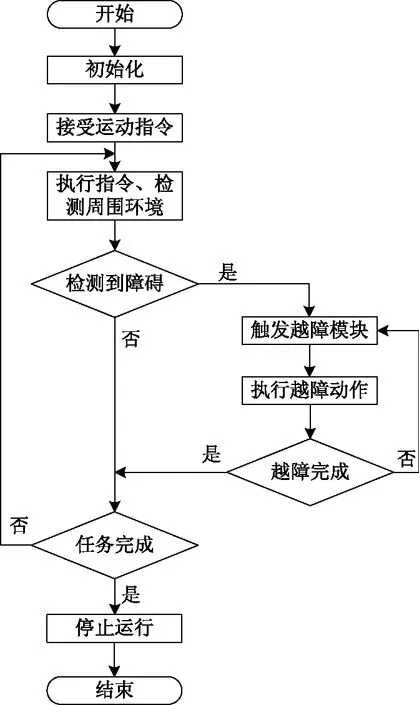
图8 越障机器人越障流程图
5 越障性能试验
越障机器人越障性能试验选择高度为150 mm的3层台阶作为障碍物,以0.5 m/s的速度进行10次越障性能试验(见图9)。试验结果见表1。
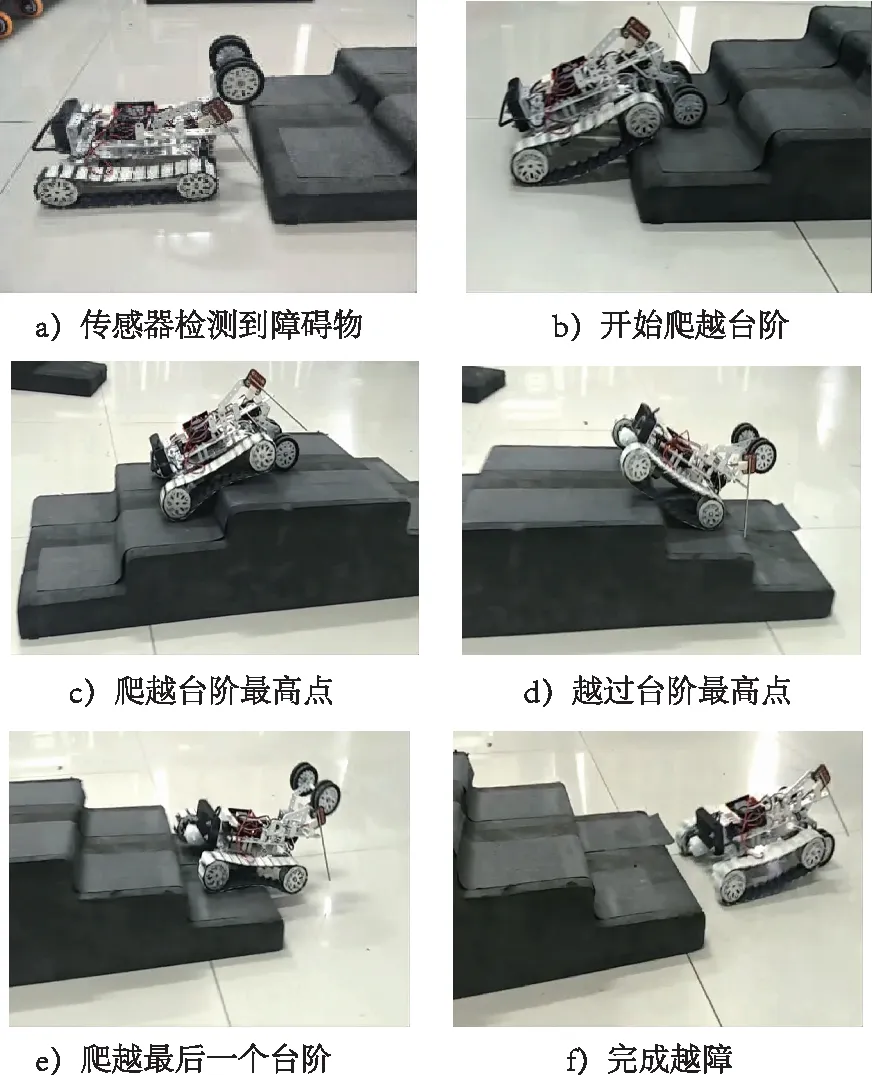
图9 越障机器人越障性能试验
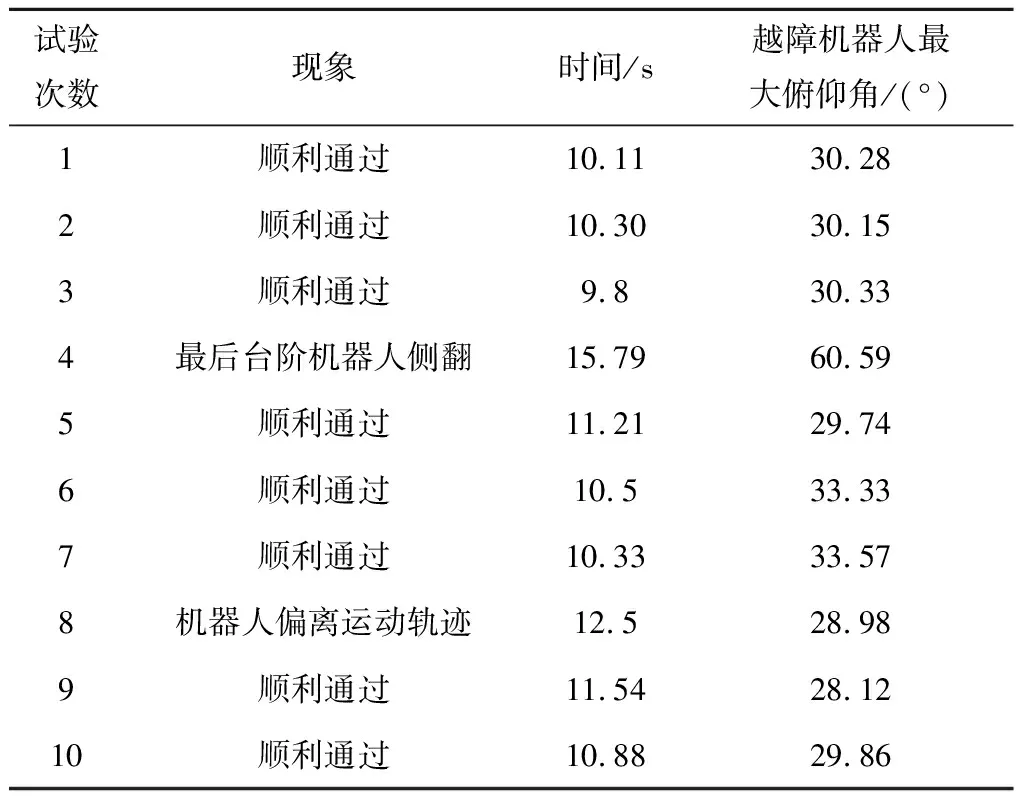
试验次数现象时间/s越障机器人最大俯仰角/(°)1顺利通过10.1130.282顺利通过10.3030.153顺利通过9.830.334最后台阶机器人侧翻15.7960.595顺利通过11.2129.746顺利通过10.533.337顺利通过10.3333.578机器人偏离运动轨迹12.528.989顺利通过11.5428.1210顺利通过10.8829.86
试验结果表明,越障机器人能够顺利通过150 mm高度的3层台阶,完成时间约为11.3 s。说明所设计的越障机器人具有较强的越障能力。
6 结语
本文通过对障碍物进行分析,确定了越障机器人的系统整体设计方案;利用组件设计搭建了越障机器人机械本体,并进行了越障机器人越障过程分析;基于BASRA主控板及Bigfish扩展板,完成对越障机器人的控制系统硬件电路设计,采用模块化的思想编写了越障机器人控制系统软件。越障试验结果表明,所设计的越障机器人能够完成150 mm高度的3层台阶障碍,越障能力较强。