基于弗雷歇距离的道岔故障诊断方法
2019-01-08黄世泽董德存
黄世泽,陈 威,张 帆,董德存
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
随着铁路里程的逐年增加以及铁路骨干网络的形成,铁路已经成为我国运输量最大的交通工具.其运量的增加以及速度的大幅提高,对铁路信号控制设备提出了严峻的挑战.道岔是电务现场关键设备之一,由于转换运动频繁,易受外部环境影响,所以成为了电务故障的多发设备之一[1].一旦发生道岔转辙设备故障,轻则发生行车事故,影响运营,重则翻车掉道[2],造成人员伤亡和财产损失.因此,需要更加完备的运行状态监测机制和智能化的故障诊断方法来提高设备的安全性和可靠性,目前我国主要采用道岔微机监测系统来实现这一功能[3-4].现有的道岔故障诊断主要依靠工作人员观察微机监测系统所采集的道岔动作电流或功率曲线来实现故障识别,识别准确性主要依赖于相关人员的工作经验,因此,使得漏报和误报现象时有出现[5].随着铁路建设规模的不断扩大,这种人工诊断的方式已经无法满足铁路发展的需求,需要研究相应的道岔故障智能诊断方法.
目前,国内外在道岔故障智能诊断方面已经开展了相应的研究.文献[5]基于灰色系统理论,通过Fisher准则进行特征提取,实现对道岔故障的诊断.文献[6]通过对设备电气参数变化规律的分析,建立专家系统对道岔故障进行诊断并提出维修指导意见.文献[7]采用遗传算法优化支持向量机的参数从而完成对道岔控制电路的故障诊断.文献[8]利用相应监测系统的转速和压力等参数,通过建立道岔的多项式模型函数实现故障诊断.文献[9-14]将神经网络,主要是BP(back propagation)神经网络、RBF(radial basis function)神经网络、模糊神经网络以及快速贝叶斯网络应用于道岔故障的诊断.
目前的研究中,对于道岔故障诊断的问题,主要采用神经网络、支持向量机以及灰关联理论等方法.在这些方法中,神经网络需要大量的训练样本来支持其进行训练学习,支持向量机和灰关联理论等方法则需要对动作曲线进行分段提取特征,而计算机很难对动作曲线进行准确的自动分段.
虽然道岔的故障模式种类繁多,但是它具有一个极其重要的特征,即同一类道岔故障模式的动作曲线都具有相似的变化趋势.这就可以通过计算动作曲线点集之间的距离来判断它们变化趋势的相似程度.因此,本文将弗雷歇距离应用到道岔故障的诊断中,通过弗雷歇距离算法来进行道岔的故障诊断.实验表明,该方法无需大量的训练样本,不需要对动作曲线进行分段特征提取,诊断准确性高,能够完全满足实际应用的需求.
1 道岔转辙机动作电流曲线
道岔的动作是由转辙机来提供动力的.因此,转辙机的工作状态就能够直接反映道岔的工作状态,而转辙机的工作状态则直接体现在微机监测系统采集到的转辙机动作电流曲线以及动作功率曲线上.
目前,铁路上的转辙机设备主要为ZD6直流电动转辙机和S700K交流电动转辙机.ZD6直流电动转辙机是我国铁路运用最广泛、装配率最高的电动转辙机,主要用于非提速区段以及提速区段的侧线上;而S700K交流电动转辙机主要应用于提速区段.本文针对ZD6直流电动转辙机的故障诊断方法进行研究.由于针对S700K交流电动转辙机的故障诊断也是依赖其动作电流曲线以及功率曲线,因此,该方法对S700K交流电动转辙机的故障诊断也具有一定的参考意义.
图1为ZD6转辙机正常工作时的动作电流曲线,可分为解锁、转换、锁闭及表示4个部分.
由图1可知,对于解锁阶段,转辙机开始工作,具有较大的启动电流,使得动作电流由0迅速上升,道岔进入解锁阶段,随着设备的运行,道岔解锁完成后动作杆在杆件内有5 mm以上空动距离,负载变小,电流迅速回落.在转换阶段,电机转速经过减速器减速后,以匀速作用于动作杆带动道岔平稳转换,此阶段动作电流曲线应为一条平稳曲线.对于锁闭阶段,这一过程为道岔尖轨被带动到另一侧,尖轨与基本轨密贴,动作齿轮锁闭圆弧在动作齿条削尖齿中滑动锁闭道岔,自动开闭器动接点转换,切断动作电路,其动作电流曲线为尾部平滑迅速回0[10].对于表示阶段,转辙机的动作回路切断,表示回路接通,其动作电流曲线保持为0.
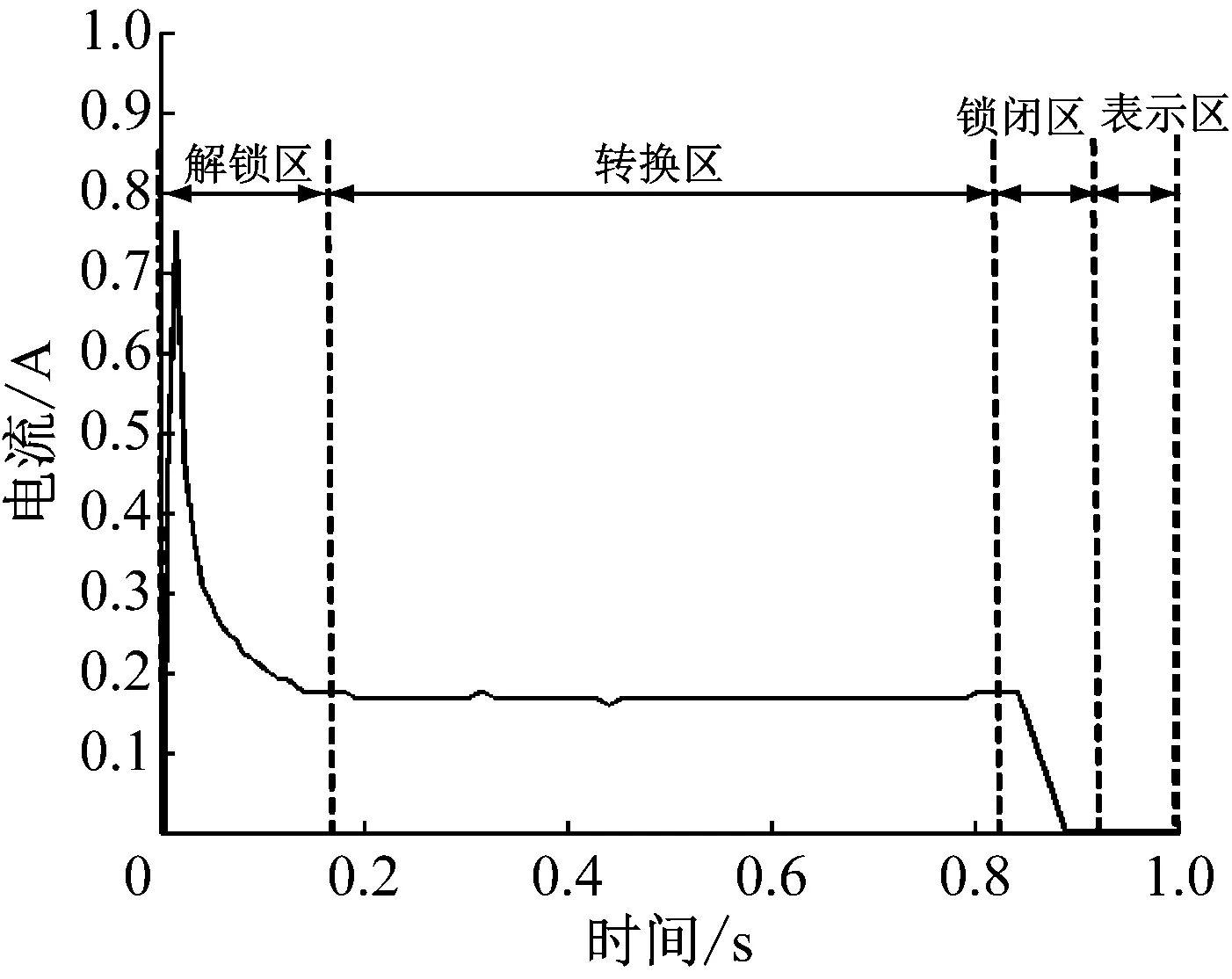
图1 ZD6型转辙机正常工作过程的动作电流曲线Fig.1 Current curve of normal action of ZD6 switch machine
2 基于弗雷歇距离的道岔故障诊断方法
2.1 总体设计
道岔故障诊断方法的总体流程如图2所示.首先,根据现场获得的大量曲线,按照相关标准对曲线进行分类,获得积累典型的故障曲线.其次,通过对典型故障曲线的分析,得到各类故障的参考曲线作为计算相似度的模板曲线,然后计算待识别曲线与模板曲线之间的弗雷歇距离,从而得到相应的相似度,通过对相似度之间的比较分析,将相似度最大的模板曲线所代表的故障模式作为诊断结果进行输出.
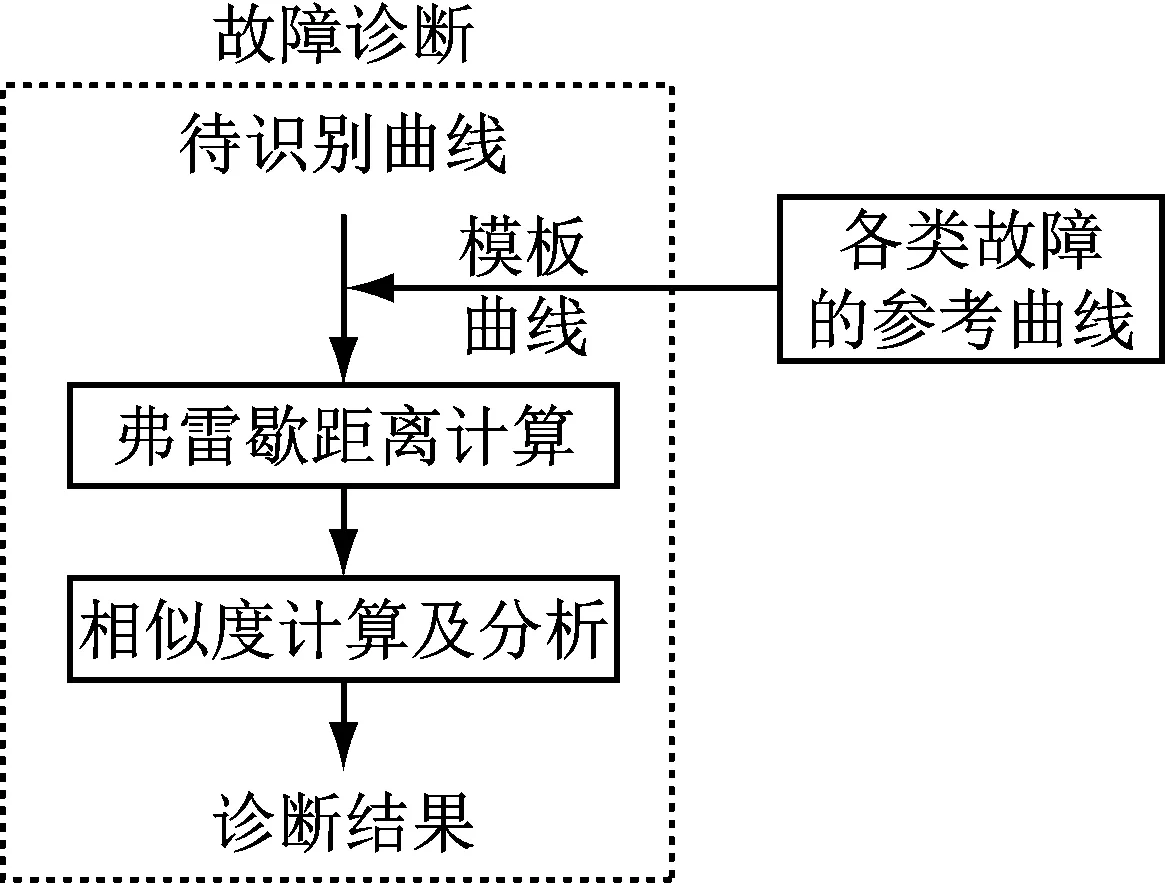
图2 道岔故障诊断系统的总体流程图Fig.2 Overall flowchart of turnout fault diagnosis system
2.2 弗雷歇距离算法
距离空间的概念是法国数学家弗雷歇于1906年提出的,又称为弗雷歇距离.它将现实空间的距离概念推广到一般的集合上,为抽象空间之间的距离度量提供了理论基础.
设A和B是S上的两条连续曲线,即A:[0,1]→S,B:[0,1]→S;又设α和β是单位区间的两个重新参数化函数,即α:[0,1]→[0,1],β:[0,1]→[0,1];则曲线A与B曲线的弗雷歇距离F(A,B)定义为

其中:d是S上的度量函数[15].
基于以上弗雷歇距离的思想,本文采取适合于计算机的离散弗雷歇距离算法来刻画两条曲线之间的距离,并作为其弗雷歇距离,其具体实施过程如下:
(1) 待识别曲线L1可表示为
P={P(1),P(2),…,P(n),…,P(N)}
式中:P(n)=(xn,yn);n为曲线L1上的采样点的序号,n=1为起始采样点,n=N为末尾采样点;xn为第n个采样点的横坐标;yn为第n个采样点的纵坐标.
(2) 模板曲线L2可表示为
P′={P′(1),P′(2),…,P′(m),…,P′(M)}

(3) 计算L1上各采样点到L2上的各采样点之间的距离,得到距离矩阵D

(4) 找出距离矩阵D中的最大距离dmax=max(D)以及最小距离dmin=min(D),初始化目标距离f=dmin,并设置循环间隔
(5) 将距离矩阵D中小于或等于f的元素设置为1,大于f的元素设置为0,从而得到二值矩阵D′如下:


式中:1≤m≤M,1≤n≤N,1≤m+k≤M,1≤n+k≤N,k={0,1},k′={0,1}.
(7) 若在步骤(6)中未找到满足条件的路径,则设置目标距离f=f+r,之后重复步骤(5)和(6);若在步骤(6)中找到满足条件的路径或者目标距离f=dmax,则进入下一步.
(8) 待识别曲线与模板曲线之间的弗雷歇距离F=f.
2.3 基于弗雷歇距离的道岔故障诊断
通过弗雷歇距离,可以得到两条曲线点集之间的距离.弗雷歇越小,说明两条曲线之间的相似程度越高;弗雷歇越大,说明两条曲线之间的相似程度越低.因此,对相似度S的定义如下:
式中:F为两条曲线之间的弗雷歇距离.
本文中的故障诊断方法是基于相似度的原理,首先计算待识别曲线L与各个模板曲线Wi之间的相似度Si,然后将相似度最大Smax的模板曲线所代表的故障模式作为诊断结果进行输出,具体如图3所示.正常模板曲线用W0表示,故障模板曲线依次用W1、…、Wt表示,t表示故障模式总数.
3 实例验证
3.1 样本数据说明
根据济南铁路局的调研报告以及相关文献,将ZD6型转辙机的故障模式分为8种,如表1所示的,其相应的转辙机动作电流曲线如图4所示.

表1 ZD6型转辙机故障模式分类Tab.1 Fault mode classification of ZD6 switch machine

图3 基于弗雷歇距离的道岔故障诊断流程图Fig.3 Fault diagnosis of turnout based on Fréchet distanceosis system
3.2 功能测试
选择一种道岔故障模式确定为W5类型的动作电流曲线,如图5所示.将图中的动作电流曲线作为待识别曲线,应用本文中的道岔故障诊断方法对其进行诊断,其相似度计算结果如表2所示.

表2 图5所示动作电流曲线的相似度计算结果Tab.2 Similarity calculation results of Fig.5
由表2可知,图5所示的动作电流曲线与故障模式W5的相似度远高于其与其他模板的相似度,因此判定图5所示的动作电流曲线的故障模式为W5,与实际情况相符.
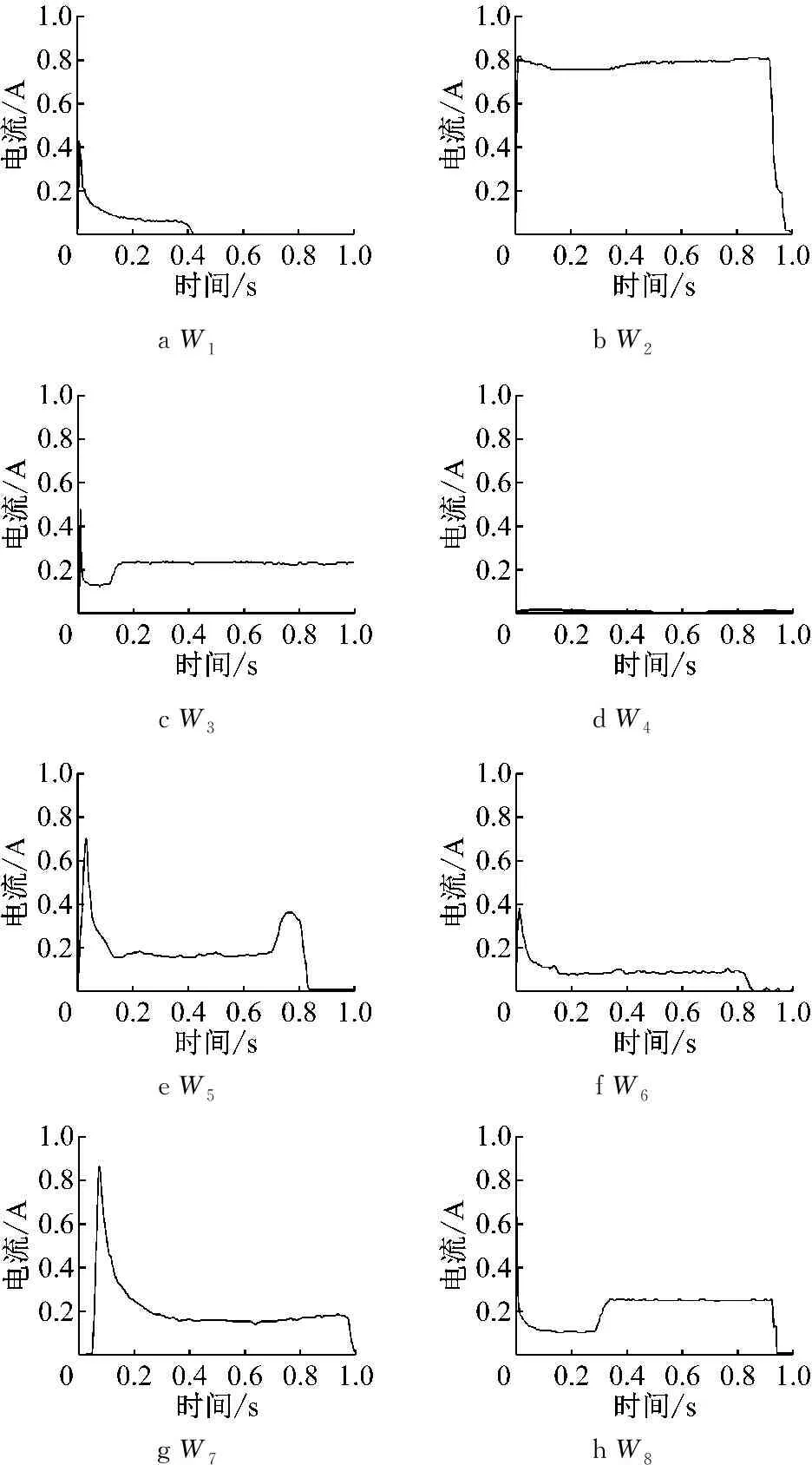
a W1b W2c W3d W4e W5f W6g W7h W8
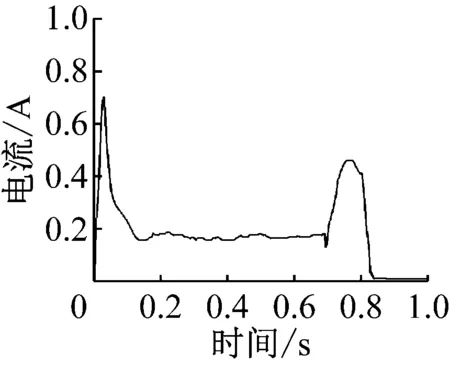
图5 现场某次道岔故障的动作电流曲线Fig.5 Action current curve of a switch fault on the spot
同时,由表2可知,虽然故障模式W7与正常曲线W0的差异性很小,但是图5所示的动作电流曲线与正常曲线W0、故障模式W7的相似度计算结果分别为2.05和1.85,仍存在着差异性,说明基于弗雷歇距离的相似度通过比较曲线的变化趋势对细小的差别也有很好的识别效果.
3.3 性能测试
将从济南铁路局调研获得的转辙机故障时微机监测系统采集到的动作电流曲线作为测试集合,利用本文的道岔故障诊断方法对其进行诊断,其诊断结果如表3所示.
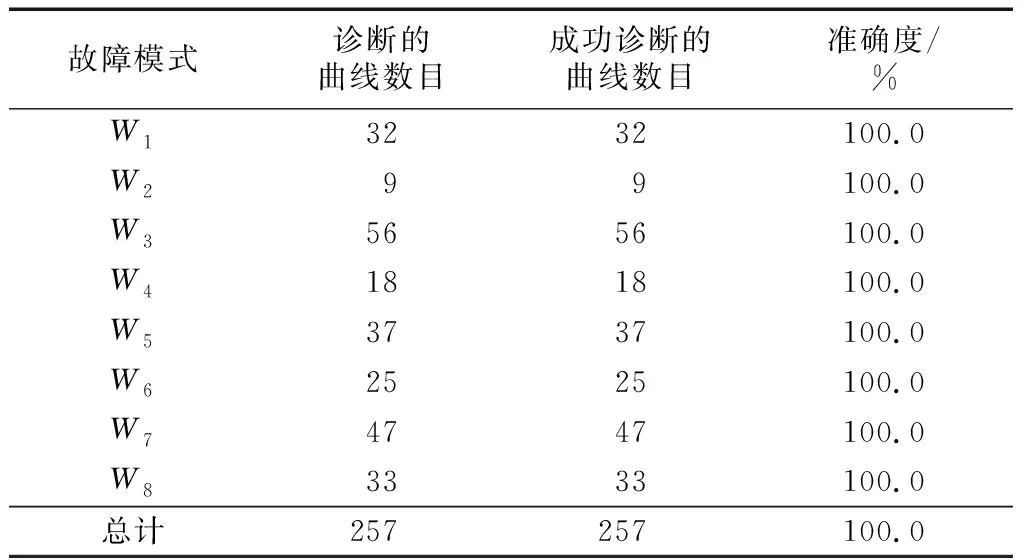
表3 测试集合的诊断结果Tab.3 Diagnostic result of the test
由表3可知,本文中道岔故障诊断方法针对ZD6型转辙机的8类故障模式,均能够准确地诊断出待识别曲线所对应的故障模式,而且诊断准确度达到了100.0%.因此,本文中的道岔诊断方法对于道岔故障有着很好的识别效果.
4 总结
本文针对道岔故障诊断问题,提出了一种新的解决思路——相似度函数定义法:首先根据铁路局定义的各类故障的参考曲线得到模板曲线,然后根据基于弗雷歇距离定义的相似度函数,计算待识别曲线与各模板曲线的相似度,将相似度最大的模板曲线所对应的故障模式作为待识别曲线的诊断结果输出.实验表明,该方法无需大量的训练样本,也不需要对动作电流曲线进行分段特征提取.同时,该诊断方法的诊断拥有较高的识别度,完全能够满足实际应用的需求.由于调研的数据相对有限,可能会出现一类异常曲线,假如与正常曲线的差异性很小,使用本文方法可能会引起误判.若现场需要对类似异常曲线进行识别,可以根据曲线的具体情况,采取多重辨识以及分段计算相似度的方法,进行更加深入的研究.
