大尺寸测量系统运动目标测量能力校准现状
2019-01-07甘晓川赵子越马骊群
甘晓川,赵子越,马骊群
(航空工业北京长城计量测试技术研究所,北京 100095)
0 引言
常见的大尺寸测量系统中,全站仪、激光跟踪仪、动态工业摄影测量系统、iGPS/wMPS、激光跟踪干涉仪等具有一定的运动目标跟踪测量能力,能够使用连续扫描测量的方式获取空间坐标,记录运动轨迹等。在航空航天、汽车制造、船舶风电和重型工业等工业现场较多。
由于这些测量系统的测量原理、结构形式各不相同,它们的校准方法有很大差异。对同一种测量系统来说,测量静止目标和测量运动目标的准确度是不同的,通常测量运动目标的准确度要低于测量静态目标。一些测量系统面世时间不长或数量不多,造成对它们校准方法(特别是测量运动目标能力的校准方法)研究不多。随着几何量测量更多地参与到动态目标测量中(如利用激光干涉仪对6D精密摇摆台进行动态参数校准[1]),对于测量运动目标能力的校准显得愈发重要。本文将目前的各主要动态测量系统的校准现状加以汇总,帮助有关人员了解现状。
1 动态测量系统
1.1 全站仪
全站仪是全站型电子速测仪的简称,是一种在电子经纬仪基础上增加了电子测距功能的大地测量仪器。高精度的全站仪测距部分一般采用相位法。其静态测角重复性为0.5″,测距误差在±(1 mm+10-6L)级别,测距范围可达千米级。某些全站仪具有马达驱动、自动目标识别(Automatic Target Recognition,ATR)和锁定跟踪等功能,可以对运动目标进行跟踪测量(Leica MS60在100 m处切向速度为45 m/s[2]),可以跟踪特定的目标,甚至可以实现扫描测量的功能。在某些测距精度要求不高的应用中,为动态目标测量和跟踪提供了一种可行的技术方案。
1.2 激光跟踪仪
激光跟踪仪是自1987年[3]开始发展起来的一种激光测量系统,集激光干涉测距技术、绝对测距技术、光电检测技术、精密机械技术、计算机控制技术、现代数值计算技术、坐标测量技术、不确定度分析技术于一体, 具有安装快捷、操作简便、实时扫描、测量精度高、效率高等优点,被誉为“便携式三坐标测量机”[4]。工作时,配合反射镜、接触式测头或非接触测头等进行目标测量,先利用激光干涉测距或绝对测距技术测量到目标的距离,并利用高速光栅测角测量到目标的两个角度, 再根据球坐标测量原理给出点的空间三维直角坐标,如图1所示。

图1 球坐标的原理图
跟踪仪的2个角度的测量均使用高精度角度传感器,测角重复性在1″左右。距离的测量一般使用激光干涉测距(IFM)或绝对测距(ADM)。目前的技术水平下,测距激光干涉仪的MPE=±0.5×10-6L;ADM在全部测量范围内的MPE=±10 μm。二者跟踪能力的不同,主要体现在横向跟踪速度和加速度的不同,如表1所示。
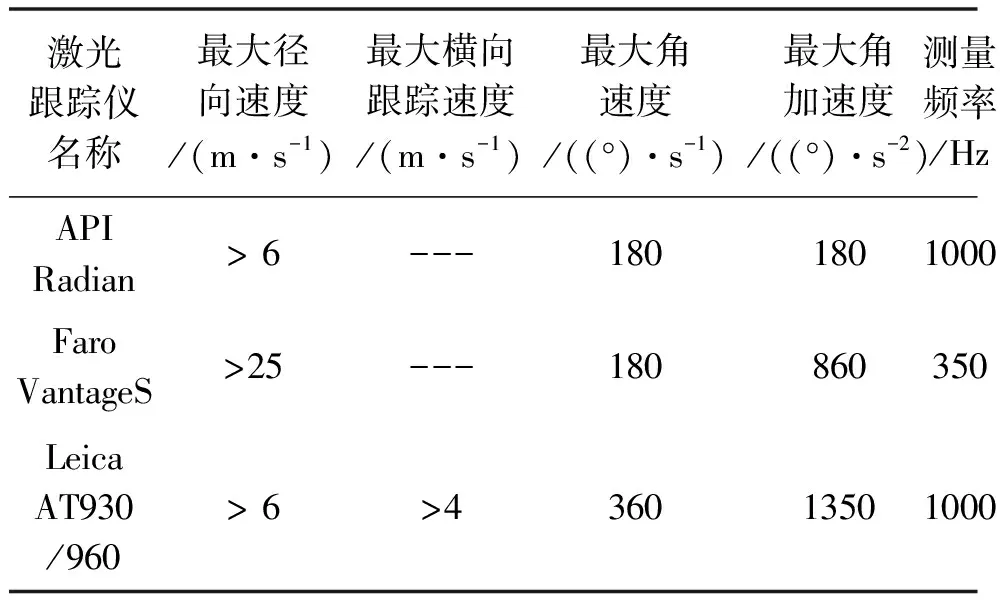
表1 常见激光跟踪仪动态性能参数
1.3 动态摄影测量系统
国外在视觉测量方面的研究起步较早,无论是单相机系统还是双/多相机系统,都推出了多个种类。在双相机系统方面,美国GIS公司的V-Stars DynaMo系统比较著名,其采用500万像素相机时,测量的MPE=±(14 μm+14×10-6L),最高工作频率为10 Hz。最新的INCA4专业相机具有4096×3072像素,提供了更高性能。由两台INCA4组成的实时动态测量系统,测长误差的MPE=±(9 μm+9×10-6L),具有更快的电子快门和高速闪光灯,最高的工作频率约为3 Hz。
德国GOM公司的Aramis SRX,是一种基于双目立体视觉结合数字图像相关法的三维应变测量系统,采用两台像素为4096×3068的相机,全分辨力时最高工作频率为335 Hz,在4096×480分辨力时最高可达2000 Hz。主要用于变形、应变、材料性能的测量,如测量氧化锆陶瓷的弹性模量[5]。
加拿大NDI公司的PRO CMM系统使用3个线阵CCD实现高速测量,可应用于汽车、机器人、工程、风洞试验等领域的静态和动态测量。在35 m3的测量范围内最大允许误差MPE=±(110 +L/40)μm,单点的重复性最高为20 μm[6],采样速率最高可达4500 Hz。配合使用动态组件(DPR)还可以监测被测对象的意外移动和震动,且能够提高测量精度。
国内某厂商定制的双目立体视觉系统中,使用2336×1728像素的两台CMOS相机组成可动基线的三维动态测量系统,最高帧率可达500 Hz,在9 m范围内其静态测量误差不超过0.4 mm。
1.4 iGPS/wMPS
上世纪 90 年代,美国Arcsecond公司(后被Nikon公司收购)在 GPS原理的启发下开发了Indoor GPS(也称为iGPS或室内GPS)系统[4]。iGPS测量技术具有精度较好、可靠性较好、效率较高的优点,主要用于解决大尺寸空间的测量与定位问题[7]。iGPS角度测量原理如图2所示。

图2 iGPS角度测量原理图
iGPS每个发射器的旋转频率都是唯一确定的(大约为50 Hz),这使得接收器能够跟踪特定的发射器并与其它发射器信号区分。发射器在旋转过程中,发出选通脉冲,作为每一圈旋转的起始标志。
接收器接收到发射器发出的选通脉冲后开始计时,作为计时零位;当扇面П1扫过接收器时,接收器发出一束选通脉冲,并将第一束扇形光束传输到接收器的时刻记为t1;同理,当扇面П2扫过接收器时,接收器发出一束选通脉冲,将第二束扇形光束传输到接收器的时刻记为t2;已知发射器的旋转角速度为ω,接收器与发射器之间的方位角Az和俯仰角El分别为[8]
(1)
(2)
天津大学也开发了类似原理的wMPS系统。wMPS(workspace Measuring Position System)系统是一种组合分布式的坐标测量系统,它基于前方角度交汇原理,采用光电扫描的角度测量方式,提高了自动化测量能力和测量效率[9]。
1.5 激光跟踪干涉仪
激光跟踪干涉仪(LaserTRACER)是德国Etalon公司2006年发布的产品,2015年发布了最新一代的LaserTRACER-NG。最初开发的目的主要是为解决CMM和机床的定位精度校准的问题。本质上可以认为激光跟踪干涉仪是具有目标跟踪功能的干涉仪,虽然其内部也具有两个角度反馈,但只用于本身的运动控制,进行空间坐标解算时只使用长度测量信息。可采用多台同时测量或者单台分时测量组成多边解算系统,进行空间坐标测量。相较由角度和长度组成的球坐标测量系统,使用多边解算的方式能达到较高的坐标测量精度[10]。其测量范围为0.2~20 m,长度测量的不确定度U=(0.2+0.3L) μm (k=2)[11]。
2 动态测量系统校准方法
2.1 全站仪
虽然全站仪是球坐标测量系统,但对其校准时,采用的是角度和测距两部分分别校准的方式。其中角度部分依据JJG 100 - 2003《全站型电子速测仪检定规程》进行检定或校准,测距部分依据JJG 703- 2003《光电测距仪检定规程》进行检定或校准。但对全站仪的运动目标测量能力和目标跟踪能力无相应的检测规范。
2.2 激光跟踪仪
2.2.1静态参数的校准
最早的跟踪仪校准方法是2006年ASME发布的B89.4.19,主要在跟踪仪不同距离处,相对于跟踪仪摆放为水平、竖直、左右对角等不同姿态,结合跟踪仪处于不同的水平角共105个状态,使用定长标尺对测长误差进行校准。双面示值误差的校准是用正反面测量功能在跟踪仪4个水平角度,分别测量上中下3个目标点,即共进行12个点的测量,每个点测量3次,进而得到双面误差。使用直线标准器(固定目标或者移动目标)测量跟踪仪的测距性能,其测点包括跟踪仪测量范围内4个几乎均布的点和用户任意选定的2点。但是该标准中没有对跟踪仪的运动特性的校准给出规定[12]。
GJB 6201-2008中规定,校准的主要参数有:内置激光干涉仪测量示值误差、长度测量示值误差、绝对距离测量仪ADM的测量示值误差,基点位置误差、温度气压传感器的示值误差和内置激光干涉仪的真空波长不确定度等7个项目[13]。
国际标准化组织ISO 2016年发布了ISO 10360-10:2016,采用了B89.4.19的基本方法,对某些项目的测量点数量有新的规定,还增加了探测误差的校准,包括球反射镜(Spherically Mounted Retroreflector,SMR)、接触测头(Stylus and Retroreflector Combination,SRC)、非接触测头(Optical Distance sensor and retroreflector Combination,ODC)。通过探测直径大于10 mm且小于51 mm的已校准过形状和尺寸的标准球,确定形状探测误差和尺寸探测误差[14]。25个点位如图3所示。
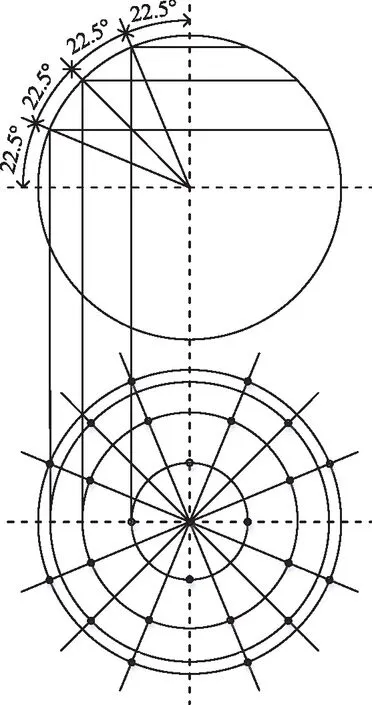
图3 25点点位分布
2.2.2动态参数的校准
相对于跟踪仪测量静止目标能力的校准方法,对于它们测量运动目标能力的校准的研究显得不多,发布的校准规范就更少。文献[15]提出采用圆轨迹的方式对跟踪仪的运动目标测量能力进行校准,文献[16]利用电机实现了上述方法。在发布的校准规范中,国家计量技术规范JJF 1242给出了以标准圆轨迹的方式对跟踪仪的动态速度极限、动态示值误差、动态示值变动量进行校准的方法[17]。
文献[18]在该方法基础上,总结跟踪仪动态性能校准中的特点,对改进动态特性的校准方法有一定的借鉴作用。其中,考虑增加RMS表示动态示值变动量,该参数在Spatial Analyzer (SA)的拟合计算中直接给出,校准中使用方便;改进测量条件,在某些跟踪仪的校准中发现,在转速设置为0.7RL时,跟踪仪虽能连续稳定地跟踪,但是不能进行测量,只有稍降低转速后才能进行测量。
文献[19]通过对激光跟踪仪动态测量精度的理论分析和实验,得出如下结论:①以基准尺为参考进行的大量重复动态测量,可以现场快速标示激光跟踪仪动态测量精度及稳定性;②双频干涉仪可以在室内精确检定激光跟踪仪的动态测量精度;③角度误差是造成动态测量误差的重要因素;④双频干涉仪检定结果表明,不同频率对动态测量结果没有显著影响。
激光跟踪仪是精度较高的移动式坐标测量系统,其动态性能在装配、制造等领域有较大的应用空间。但缺乏针对其动态性能的稳定性、动态测量精度和范围等指标的现场快速标定方法和室内高精度校准方法的相关研究,以目前的静态指标标识其动态测量精度是不够的[19]。
2.3 动态摄影测量系统
2.3.1静态参数的校准
目前国内没有统一的计量技术规范用于校准工业摄影测量系统,实际中通常参考VDI/VDE 2634系列标准中part 1关于单相机点对点的探测系统的校准方法,在相机测量范围内使用具有多目标点的定长标尺以多个空间位置的长度测量误差表征工业摄影测量系统的测量能力,但没有涉及双/多相机系统和动态性能的校准方法[20]。
GB/T 34890-2017中规范了数字摄影三坐标测量系统的验收检测和复检检测,并分别给出了坐标测量重复性、测长误差、标尺长度的测量方法和计算方法[21]。
2.3.2动态参数的校准
航空工业计量所采用圆轨迹发生器作为标准器,测量给定转速条件下回转臂上距离已知的目标点间的距离,用长度测量误差来评定系统特定转速条件下的性能。动态摄影测量系统两相机相距约2 m,相对圆轨迹发生器距离约2 m。圆轨迹发生器的回转臂两端固定有反光标记点。标记点的线速度根据v=ωr计算。其中,v表示该点线速度,ω表示旋转的角速度,r表示该点对应的回转半径。设置圆轨迹发生器以不同速度匀速转动,比较动态摄影测量系统测得的速度与设定速度之差,同时比较不同速度下两反光标记点间距离与参考值之差。被测系统的主要参数设置为:采样频率500 Hz、快门时间100 μs、相机增益50 dB。
图4和图5分别为线速度6.74 m/s时的速度曲线和该速度条件下的两点间距离曲线。

图4 线速度曲线

图5 距离误差
2.4 iGPS/wMPS
2.4.1静态参数的校准
静态测量准确性的评价主要有两种方式,单点比较法和参考长度比较法[22]。单点比较法使用iGPS/wMPS和另外一种坐标测量系统,对大量点坐标分别进行测量,坐标系统一之后,比较同一点两系统坐标测量之差。参考长度比较法使用定长标尺在测量范围内进行测量,用GPS/wMPS系统测量结果与标尺参考长度之差表征系统的测量能力。
2.4.2动态参数的校准
对iGPS/wMPS的精度分析、使用方法、校准方法的研究均较少。在文献[23]中,对wMPS的动态测量重复性、动态测量精度的校准方式进行了探索。动态重复性通过多次测量轨迹的重复性来评价。动态测量精度采用平面和直线两种方式进行评定,比较不同目标运动速度下的位置偏差,实验数据表明运动速度越快,动态测量误差越大。
2.5 激光跟踪干涉仪
目前没有激光跟踪干涉仪专用的计量技术规范,主要参照JJG 739-2005 《激光干涉仪检定规程》对干涉仪进行部分校准。设置跟踪部分保持不动,将测量激光与标准装置的干涉仪光路准直。图6为某激光跟踪干涉仪测量得到的误差曲线。

图6 激光跟踪干涉仪误差曲线
目前,尚未见有激光跟踪干涉仪测量运动目标性能的校准工作。
3 结束语
综合文献和实际工作情况,相对于静态性能的校准,运动目标测量能力的校准在理论、实践、规范等方面的研究工作开展均不充分。甚至还存在以静态精度替代动态精度进行测量结果分析和不确定度评定的状况,这可能会造成测量结果的误用。因此提出以下建议:①相关测量人员应加强对测量系统原理的了解,充分掌握静态性能和动态性能的区别和联系;②未来应深入开展几何量动态测量理论的研究,为动态参数校准奠定基础;③补充并丰富动态测量系统的校准手段,使用圆轨迹或直线轨迹开展动态试验;④进一步开展测量方法研究,不但应考虑运动目标速度对测量的影响,还应考虑运动目标加速度对测量结果的影响。
