反应堆控制棒偶发棒位报警与测量精度的关联分析
2019-01-03罗红波罗建峰
罗红波,罗建峰
(中广核核电运营有限公司,广东 深圳 518124)
1 RGL棒位测量系统简介
棒位系统接收位于反应堆压力容器的位置传感器信号,通过译码产生每个棒束组件的实际测量棒位。
棒位测量系统包括以下几个部分:RPI测量探头;测量信号处理柜;棒位显示柜;逻辑控制柜。
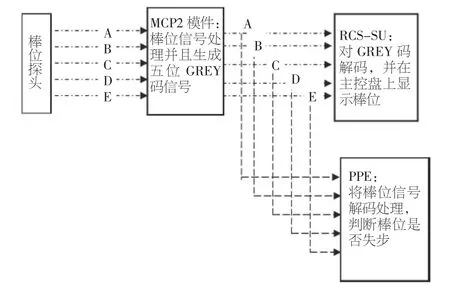
棒位测量及信号处理部分由MCP10、MCP22、SU组成。MCP10是测量线圈的电源模块,直接给CPB10棒位探头的初级线圈和辅助线圈供电。MCP22主要接受来自次级线圈的感应电压,处理后生成五位棒位GRAY码,并将GRAY码信息送入0米的SU进行信号处理。下图为信号处理之间的关系。
2 影响棒位传感器测量精度的原因分析
2.1 传感器自身缺陷
棒位传感器制造安装的非线性,包括加工工艺,选材以及线圈绕制精度,探头和驱动杆现场安装误差,运行温度条件等使其内在特性发生改变,都最终会直接影响探头测量精度。
2.2 线圈之间存在的相互影响
辅助线圈和A线圈的绕制方法,会影响棒位测量。首先,辅助线圈比照测量线圈制作,作为一个基准线圈,当它的感应电压保持不变时,测量线圈电压也会保持不变,这样设置的阈值才相对有效。但实际工作过程中,棒位提升过程中,主电流会逐渐变大,使辅助线圈感应电压也偏离原来电压值,反过来影响二次线圈。其次,A线圈绕制的距离最近,这样做是为了抵消驱动杆的磁滞特性,但这种做法在驱动杆在不同的工作点,应该上提的具体距离是有差别的,一旦选择制造错误,无疑会造成传感器本身的非线性。
2.3 棒控动力线圈的影响
控制棒静止时SG线圈通半电流4.7A以抓住棒停在某一位置,半电流为直流电源,产生恒定磁场,保持磁轭线圈离棒位传感器最下方的辅助线圈距离比较远,不会影响棒位测量线圈电压。然而在动棒时,动力线圈不断通电断电,这样便会形成变化的磁通,其中一部分会穿过棒位线圈,产生干扰信号。
试验表明,二次线圈A/B/C/D/E会不同程度地受棒控动力线圈影响,但是各个测量线圈与动力线圈相对位置各有不同,干扰信号的影响不尽相同,AB码线圈影响比较大,这种非线性使某些测量棒位偏差较大,动棒时触发棒位故障报警。
2.4 测量原理的影响
通过分析探测器磁通的分布及大小,我们得知磁场强度设置在10.62A/cm,选在该种磁物质的不饱和段,其特点是B随H变化很快,且B随H的变化是非线性的。缺点是工作点选在不饱和段,其磁化过程具有不可逆性,即B上升和下降不是沿着相同的曲线,下降的曲线会高于上升的曲线。这个工作点设置的特点造成探测器感应电压的非线性,所以需在MCP22中设置回差电路来抵消这个误差。
2.5 实现测量电路的影响
棒位传感器设计制作完成现场安装后,工作点已设定好,为保持传感器中磁场恒定,我们通过辅助线圈来设置一个闭环控制回路,磁场稳定时,辅助线圈的感应电压不变,测量线圈A/B/C/D/E的感应电压也不会改变,当辅助线圈电压发生改变时,MCP10会据此改变一次电流大小来回补磁场的变化,这样就可减小由于控制棒位置的变化造成的测量误差。
3 常见棒位故障报警及处理方法
3.1 常见故障现象
常见故障现象主要体现为单步提插无动棒指令时测量棒位异常翻转。按照正常的理解,单步提插控制棒或静止是不会产生失步报警的,除非出现控制棒卡棒的情况。该故障现象的出现,对机组正常运行的棒位判断形成了一定的困扰,经过不断地跟踪和分析,理论上圈定了闪发原因是棒位测量信号存在一定宽度和高度的尖峰。
3.2 故障诊断处理措施
3.2.1 更换棒位格雷码转换板MCP22
最初怀疑与MCP22板件的测试按钮接触有关。现场在用的MCP22板件多产自1990年左右。测试按钮属纯机械结构,长时间运行之后由于氧化存在接触不良的可能。这种接触不良导致RGL闪发棒位报警已多次出现过,但更换板件之后仍然闪发RGL019AA。因此,由于MCP22板件问题导致RGL019AA闪发的可能性较低。
3.2.2 通过修改棒位稳定时间TEMFIL来消除报警
TEMFIL时间在动态时是棒位信号经滤波后的稳定时间,也称为棒位响应时间。该时间意义实际上是移动过程中,LT收到指令棒位和得到相应的测量棒位信号的时间差距。从其定义出发和我们所看到的RGL019AA闪发问题关联并不大,为了排除可能性,在修改过该参数从10秒到15秒,没有任何影响。
3.2.3 全行程提插控制棒,使用记录仪记录并消除故障
提插过程的棒位跳变是由线圈测量通道固有的鼓包现象产生的,通过调整MCP22的A通道切换阈值,可以消除由于鼓包导致的棒位提插时的跳变现象。两次大修对R棒进行了提插,记录产生鼓包的棒位,通过调整阈值消除了鼓包现象。
3.2.4 现象分析
首先,200步的格雷码为10111,208步的格雷码为10110,也就是说棒位指示由200步变化到208步时,A通道应该由1翻转成0。从205步提到206步时,记录仪结果显示A通道测量值已经低于定值近80mV,理论上A应该由1翻转成0,然而在主控看到的H2的棒位指示其实并没有翻转,还停留在200步。这说明虽然测量值已经略低于阈值,但由于A通道的门电路有一定的回差,所以A通道并没有从1翻转到0。
其次在插回205步时,测量曲线出现一个向下的尖峰,幅值并不是很大,约60mV左右。从理论上说,这是由于测量线圈没有完全消除反电势的影响造成的。但结合插棒时H2出现跳变这一现象,不难看出正是由于这个尖峰,使A通道的门电路动作,从而使A通道在瞬时从1翻转到0,棒位指示跳变至208步。而此时棒正是在下插过程中,所以系统会出现移动方向错误的报警。向下尖峰消失后,A通道测量值向上变化,A通道又翻转成0,主控H2棒位指示又回到200步。
4 结论
从探测器自身设计理论和实际应用分析,我们得出结论:
①温度对辅助线圈感应电压影响小;
②控制棒的位置对测量线圈感应电压影响较大;
③MCP10控制采用闭环控制可以有效地减小误差;
④MCP22阈值和回差设置也很重要,日常期间调节棒位波动消除异常报警意义重大;
⑤提升线圈对测量线圈的干扰很大,必须在电路中减弱到可以接受的水平。
总之,现场安装使用的传感器一旦制造完成,采集处理电路设计完成,影响棒位传感器的各种条件就基本固定了,许多固有因素也无法改变,想要提高测量精度,必须综合考虑,从设计、选材、制造、安装、调试等多方面着手,否则,不管哪个方面出现问题都可能造成传感器测量精度不达标,影响反应堆的正常安全运行,这个结果是大家都不愿见到的。
